 浅析IMU中加速度计、陀螺仪、磁力计原理
浅析IMU中加速度计、陀螺仪、磁力计原理
IMU:Inertial Measurement Unit,即惯性测量单元。它是由三轴加速计、三轴陀螺仪、三轴磁力计等多种传感器组成的模块。
IMU在无人驾驶汽车、无人机上面应用的比较多,包括手机等很多电子设备也有IMU传感器的存在。
下面就来讲讲IMU中三轴加速计、三轴陀螺仪、三轴磁力计的工作原理。
1、三轴加速度计三轴加速度传感器是基于加速度的基本原理去实现工作。
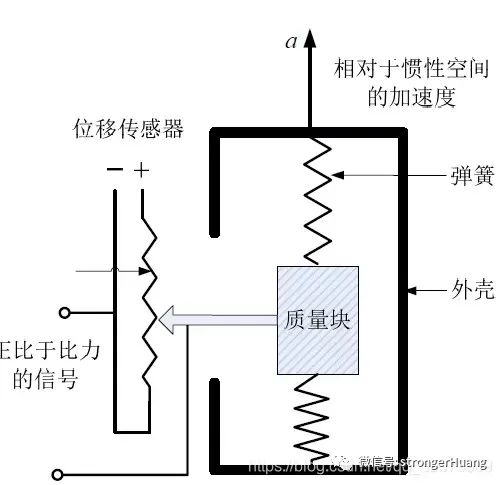
1.测量比力三轴加速度计是一种惯性传感器,能够测量物体的比力,即去掉重力后的整体加速度或者单位质量上作用的非引力。当加速度计保持静止时,加速度计能够感知重力加速度,而整体加速度为零。在自由落体运动中,整体加速度就是重力加速度,但加速度计内部处于失重状态,而此时三轴加速度计输出为零。
2.测量角度

三轴加速度计的原理能够用来测量角度。直观地,如图所示,弹簧压缩量由加速度计与地面的角度决定。比力能够通过弹簧压缩长度来测量。因此在没有外力作用的情况下,加速度计能够精确地测量俯仰角和滚转角,且没有累积误差。

MEMS三轴加速度计是采用压阻式、压电式和电容式工作原理,产生的比力(压力或者位移)分别正比于电阻、电压和电容的变化。这些变化可以通过相应的放大和滤波电路进行采集。该传感器的缺点是受振动影响较大。
介于其测量角度的工作原理三轴加速度计无法测量偏航角:
可测量俯仰角和横滚角:
2、三轴陀螺仪三轴陀螺仪是惯性导航系统的核心敏感器件,其测量精度直接影响惯导系统的姿态解算的准确性。
作用:用于测量单元中的角速度及对角速度积分后角度的计算
原理:理解三轴陀螺仪的原理首先要知道科里奥利力
科里奥利力科里奥利力(Coriolis force)有些地方也称作哥里奥利力,简称为科氏力,是对旋转体系中进行直线运动的质点由于惯性相对于旋转体系产生的直线运动的偏移的一种描述。科里奥利力来自于物体运动所具有的惯性。---来自百度百科
当一个质点相对于惯性系做直线运动时,因为质点自身惯性,它相对于旋转体系,其轨迹是一条曲线。立足于旋转体系,我们认为有一个力驱使质点运动轨迹形成曲线。科氏力就是对这种偏移的一种描述,表示为:

即本来直线的运动当放在一个旋转体系中直线轨迹会发生偏移,而实际上并直线运动的问题并未受到力的作用,设立这样一个虚拟的力称为科里奥利力。

由此我们在陀螺仪中,选用两块物体,他们处于不断的运动中,并令他们运动的相位相差-180度,即两个质量块运动速度方向相反,而大小相同。它们产生的科氏力相反,从而压迫两块对应的电容板移动,产生电容差分变化。电容的变化正比于旋转角速度。由电容即可得到旋转角度变化。
3、三轴磁力计
磁力计能提供装置在XYZ各轴所承受磁场的数据,接着相关数据会汇入微控制器的运算法,以提供磁北极相关的航向角,利用这些信息可侦测地理方位。
磁力仪是采用三个互相垂直的磁阻传感器,每个轴向上的传感器检测在该方向上的地磁场强度。
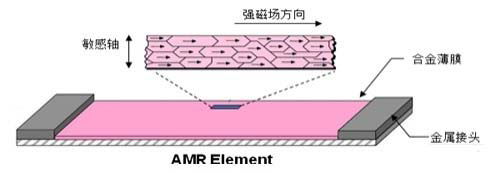
上图为一种采用具有晶体结构的合金材料。它们对外界的磁场很敏感,磁场的强弱变化会导致磁阻传感器电阻值发生变化。

另外三轴磁力计还可以采用洛伦兹力原理,电流流过磁场产生力,从而驱动电容等变化。
-
传感器
+关注
关注
2550文章
51049浏览量
753174 -
无人机
+关注
关注
229文章
10422浏览量
180206 -
IMU
+关注
关注
6文章
311浏览量
45731 -
无人驾驶汽车
+关注
关注
17文章
150浏览量
37358
发布评论请先 登录
相关推荐
陀螺仪LSM6DSV16X与AI集成(11)----融合磁力计进行姿态解算

使用飞思卡尔XS128,读取MPU9250 9轴传感器,加速度计和陀螺仪读取正常,但是磁力计一直是0.求大神们帮忙
请问有和ADIS16488性能差不多,包含加速度计,陀螺仪,磁力计,压力计,同时陀螺仪量程大于450dps的产品吗?
请问通常使用的磁力计、加速度计、陀螺仪等传感器在安装之前为什么要先校准?
请问为什么陀螺仪需校准而加速度计不需?
介绍加速度计和陀螺仪的数学模型和基本算法
介绍加速度计和陀螺仪的数学模型和基本算法
加速度计和陀螺仪的参数意义







 工商网监
工商网监
评论