 涂胶设备原理及KUKA机器人控制分析+MAKRO
涂胶设备原理及KUKA机器人控制分析+MAKRO
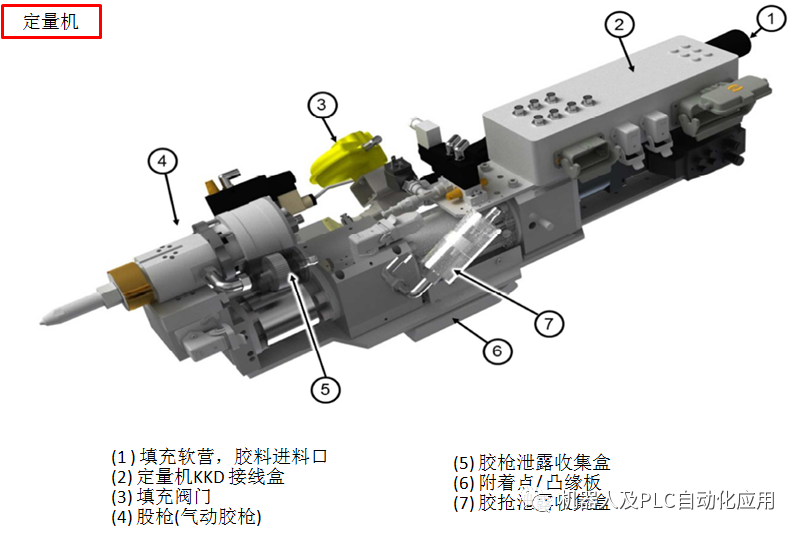
自动涂胶定量机简介:SCA定量机可以看作是杜尔涂胶得简装版,原理上是一样的但技术上杜尔要更加的复杂,SCA故障判断和控制比较简单,而杜尔涂胶需要对它的原理进行了解后维修和调试会更加的容易,由于杜尔涂胶是网络可视化,因此需要掌握的知识要更多一些。
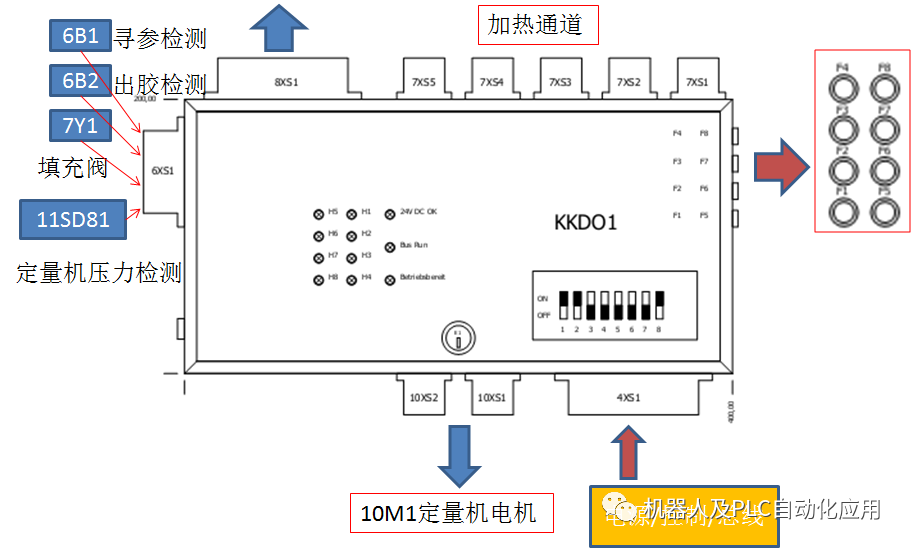
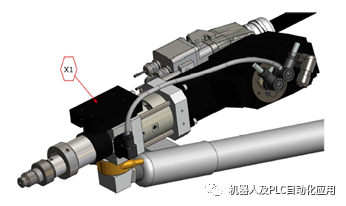
KKDD定量控制盒, 由于杜尔涂胶使用CAN总线因此在定量机的终端设备会采用终端电阻。
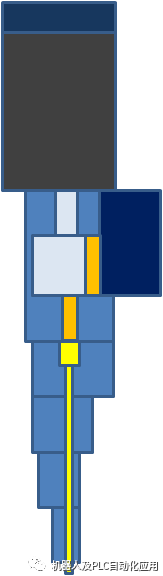
气动胶枪的行程可以监控:
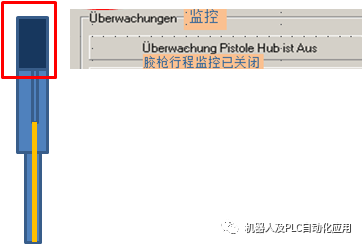
短珠电胶枪:

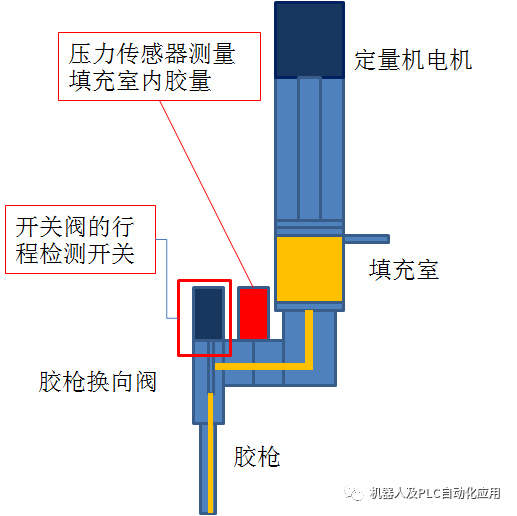
为什么定量机电机要寻参:
无论是DURR还是SCA的涂胶设备,他们在关机断电后都要进行自动寻参,这是因为他们的定量机电机使用了增量试编码器,所以在关机重启后定量机电机会沿着固定的方向去寻参!这时要有寻参前提:
1.胶枪位置确定关闭,如果是电胶枪,则应该是电胶枪先校准完,再校准定量机 .
2.电机在反转寻参时,由于处于填胶状态,需要填胶阀打开.
3.CAN线路网络无故障,
4.机器人使能
---涂胶设备在断电重启后会自动寻参,但是前提是胶枪的闭合(对于DURR这种高级的涂胶设备)
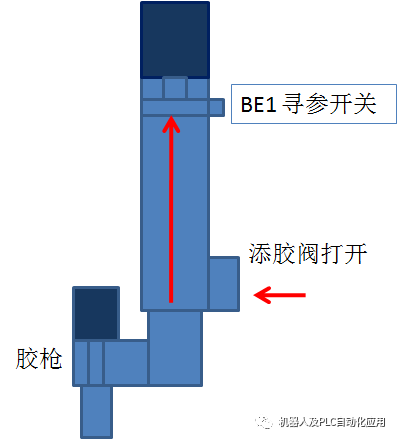
在涂胶定量机进行寻参的前提需要保证胶枪的位置是关闭的,气胶枪要好很多,一般不用寻参,电胶枪在设备断电启机会自动自动寻参,然后定量机再寻参.
电机胶枪之所以需要校正工具是因为,电机转子的转头需要有一个和胶枪嘴的正确安装位置,所以需要校正工具来清零,清零时电机不能得电旋转,清零后再校正电机。
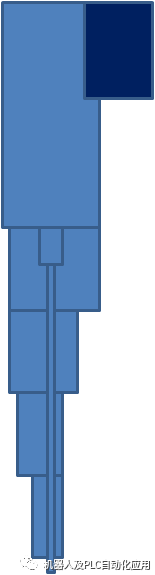
喷射螺纹涂胶设备:
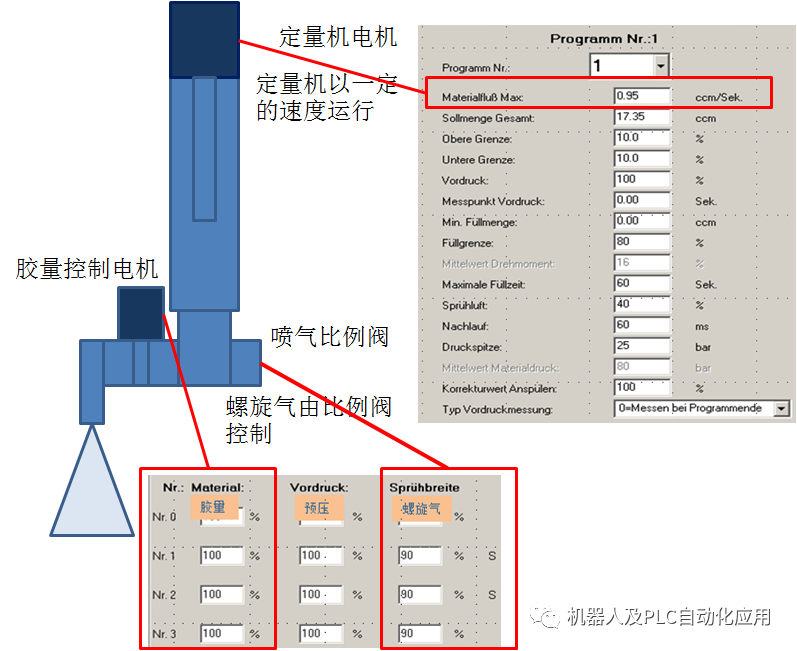
螺旋喷胶的结构:
审核编辑 :李倩
-
机器人
+关注
关注
210文章
28239浏览量
206644 -
可视化
+关注
关注
1文章
1182浏览量
20899
原文标题:涂胶设备原理及KUKA机器人控制分析+MAKRO
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
工业机器人的末端关节旋转该精确控制?
KUKA机器人问题解答
KUKA库卡机器人伺服驱动器相关型号举例
KUKA焊接机器人伺服电机常见故障及维修处理
工业机器人组成结构相关资料分享
库卡机器人MGV电源模块维修
机器人系统与控制需求简介
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
KUKA机器人相关分类及型号一览
KUKA机器人对于涂胶设备的清胶控制
涂胶设备原理及KUKA机器人控制分析+MAKRO






 工商网监
工商网监
评论