 Tina Linux配置开发指南
Tina Linux配置开发指南
1 概述
2 menuconfig
Tina采用Kconfig机制,对SDK和内核进行配置。
具体用法,可以参考Kconfig机制的相关介绍。
2.1 tina menuconfig.
Tina Linux SDK的根目录下,执行make menuconfig命令可进入Tina Linux的配置界面。
对于具体软件包:
<*> (按y): 表示该软件包将包含在固件中。
(按m): 表示该软件将会被编译,但不会包含在固件中。
< >(按n): 表示该软件不会被编译。
配置文件保存在:
target/allwinner/${borad}/defconfig
make menuconfig修改后的文件,会保存回上述配置文件。
2.2 kernel menuconfig
Tina Linux SDK的根目录下,执行make kernel_menuconfig命令可进入对应内核的配置界 面。
每个方案有对应的内核版本,如3.4,3.10,4.4,4.9等,记为x.y。
对于Tina3.5.0及之前版本,配置后文件会保存在:
target/allwinner/${borad}/config-x.y
对于Tina3.5.1及之后版本,配置后文件会保存在:
device/config/chips/${chip}/configs/${borad}/linux
3 sysconfig
3.1 说明
3.1.1 文档说明
描述GPIO配置的形式:Port:端口+组内序号。
文中的=0,1,2,3,4,5.....,如twi0,twi1....;uart0,uart1....。
部分模块的配置项目可能是多余的,同时配置举例仅供参考,不一定为真实可用的,实际使用时需向技术支持人员询问。
跟模块说明文档冲突的,以模块文档为准。
3.1.2 配置文件路径.
在方案的configs目录下,可用cconfig命令跳转过去。
Tina 3.5.0及之前版本,路径为:
/target/allwinner/${borad}/configs/sys_config.fex
Tina 3.5.1及之后版本,路径为:
device/config/chips/${chip}/configs/${borad}/sys_config.fex
3.1.3 注意事项
对于使用linux-5.4内核的方案要注意:
像以往其他方案 (如linux-4.9,linux-4.4的),会在pack 阶段解析并将 sys_config合并到dtb中,而linux-5.4 使用的是原生未改动的dtc工具,没法解析 sys_config,
所有内核用到的配置肯定都得在board.dts中设定好。但方案目录中仍保存着 sys_config.fex文件(例如device/config/chips/r528/configs/evb1/sys_config.fex),
它的作用主要是:打包阶段根据sys_config配置更新boot0, uboot, optee等bin文件的头部等信息,例如更新dram参数、uart参数等
3.2 系统
3.2.1 [product]
| 配置项 | 配置项含义 |
|---|---|
| version | 配置的版本号 |
| machine | 方案名字 |
示例:
[product]
version = "100"
machine = "m2ultra"
3.2.2 [platform].
| 配置项 | 配置项含义 |
|---|---|
| eraseflag | 量产时是否擦除。 0 :不擦, 1 :擦除(仅仅对量产工具,升级工具无效),0x11:强制擦除(包括private分区) 0x12:强制擦除(擦除private分区及secure storage) |
| next_work | PhoenixUSBPro量产完成后:1-不做任何动作,2-重启,3-关机,4-量产,5-正常启动,6-量产结束进入关机关机充电 |
| debug_mode | Uboot阶段打印等级:0-不打印,1-打印 |
示例:
[platform]
eraseflag = 1
debug_mode = 1
3.2.3 [target]
| 配置项 | 配置项含义 |
|---|---|
| boot_clock | 启动频率; xx表示多少MHz |
| storage_type | 启动介质选择0:nand 1:sd 2:emmc 3:spinor 4:emmc 5:spinand 6:sd1 -1:(defualt)自动扫描启动介质 |
| burn_key | 支持DragonSN_V2.0烧录sn号 |
注,目前nor和其他介质不兼容,若为nor,请配置为3.否则请配置为对应的介质或-1。
示例:
[target] boot_clock = 1008 storage_type = - burn_key = 1
3.2.4 [power_sply]
| 配置项配 | 置项含义 |
|---|---|
| dcdc_vol d | cdc模块输出电压 |
| aldo_vol a | ldo模块输出电压 |
| dc1sw_vol d | c1sw模块输出电压 |
| dc5ldo_vol d | c5ldo模块输出电压 |
| dldo_vol d | ldo模块输出电压 |
| gpio_vol g | pio的输出电压 |
示例:
[power_sply] dcdc1_vol = 1003300 dcdc2_vol = 1001160 dcdc3_vol = 1001100 dcdc4_vol = 1100 aldo1_vol = 2800 aldo2_vol = 1001500 aldo3_vol = 1003000 dc1sw_vol = 3000 dc5ldo_vol = 1100 dldo1_vol = 3300 dldo2_vol = 3300 dldo3_vol = 3300 dldo4_vol = 2500 eldo1_vol = 2800 eldo2_vol = 1500 eldo3_vol = 1200 gpio0_vol = 3300 gpio1_vol = 1800
补充说明:
电压名称= 100XXXX:表示把该路电压设置为XXXX指定的电压值,同时打开输出开关。
电压名称= 000XXXX:表示把该路电压设置为XXXX指定的电压值,同时关闭输出开关,当有
需要时由内核驱动打开。
电压名称= 0:表示关闭该路电压输出开关,不修改原有的值。
这里的电压值单位为mV。
3.2.5 [card_boot]
| 配置项 | 配置项含义 |
|---|---|
| logical_start | 启动卡逻辑起始扇区 |
| sprite_gpio0 | 卡量产gpio led灯配置 |
|next_work |卡量产完成后:1-不做任何动作,2-重启,3-关机,4-量产,5-正 常启动|
示例:
[card_boot] logical_start = 40960 sprite_gpio0 = port:PH21<1>
3.2.6 [card0_boot_para].
| 配置项 | 配置项含义 |
|---|---|
| card_ctrl=0 | 卡量产相关的控制器选择 0 |
| card_high_speed | 速度模式 0 为低速, 1 为高速 |
| card_line | 1 , 4 , 8 线卡可以选择,需看具体芯片是否支持 |
| sdc_clk | sdc卡时钟信号的GPIO配置 |
| sdc_cmd | sdc命令信号的GPIO配置 |
| sdc_d | sdc卡数据线信号的GPIO配置 |
示例:
[card0_boot_para] card_ctrl = 0 card_high_speed = 1 card_line = 4 sdc_d1 = port:PF0<2><1><2> sdc_d0 = port:PF1<2><1><2>sdc_clk = port:PF2<2><1><2> sdc_cmd = port:PF3<2><1><2> sdc_d3 = port:PF4<2><1><2> sdc_d2 = port:PF5<2><1><2>
3.2.7 [card2_boot_para].
| 配置项 | 配置项含义 |
|---|---|
| card_ctrl= | 2 卡启动控制器选择 2 |
| card_high_speed | 速度模式 0 为低速, 1 为高速 |
| card_line | 1 , 4 , 8 线卡可以选择,需看具体芯片是否支持 |
| sdc_clk | sdc卡时钟信号的GPIO配置 |
| sdc_d | sdc卡数据线信号的GPIO配置 |
| sdc_emmc_rst | sdc卡rst引脚 |
| sdc_ex_dly_used | |
| sdc_io_1v |
示例:
[card2_boot_para] card_ctrl = 2 card_high_speed = 1 card_line = 8 sdc_clk = port:PC7<3><1><3> sdc_cmd = port:PC6<3><1><3> sdc_d0 = port:PC8<3><1><3> sdc_d1 = port:PC9<3><1><3> sdc_d2 = port:PC10<3><1><3> sdc_d3 = port:PC11<3><1><3> sdc_d4 = port:PC12<3><1><3> sdc_d5 = port:PC13<3><1><3> sdc_d6 = port:PC14<3><1><3> sdc_d7 = port:PC15<3><1><3> sdc_emmc_rst = port:PC24<3><1><3> sdc_ds = port:PC5<3><1><3> sdc_ex_dly_used = 2 ;sdc_io_1v8 =
3.2.8 [twi_para].
| 配置项 | 配置项含义 |
|---|---|
| twi_port | Boot的twi控制器编号 |
| twi_scl | Boot的twi的时钟的GPIO配置 |
| twi_sda | Boot的twi的数据的GPIO配置 |
| twi_regulator | 上拉配置 |
示例:
[twi_para] twi_port = 0 twi_scl = port:PB0<2> twi_sda = port:PB1<2>
3.2.9 [uart_para]
| 配置项 | 配置项含义 |
|---|---|
| uart_debug_port | Boot串口控制器编号 |
| uart_debug_tx | Boot串口发送的GPIO配置 |
| uart_debug_rx | Boot串口接收的GPIO配置 |
| uart_regulator | 上拉配置 |
示例:
[uart_para] uart_debug_port = 0 uart_debug_tx = port:PF02<3><1> uart_debug_rx = port:PF04<3><1>
3.2.10 [jtag_para].
| 配置项 | 配置项含义 |
|---|---|
| jtag_enable | JTAG使能 |
| jtag_ms | 测试模式选择输入(TMS)的GPIO配置 |
| jtag_ck | 测试时钟输入(TMS)的GPIO配置 |
| jtag_do | 测试数据输出(TDO)的GPIO配置 |
| jtag_di | 测试数据输入(TDI)的GPIO配置 |
示例:
[jtag_para] jtag_enable = 1jtag_ms = port:PB14<3> jtag_ck = port:PB15<3> jtag_do = port:PB16<3> jtag_di = port:PB17<3>
3.2.11 [clock]
| 配置项 | 配置项含义 |
|---|---|
| pll4 | pll4时钟频率(MHz) |
| pll8 | pll8时钟频率(MHz) |
| pll9 | pll9时钟频率(MHz) |
| pll12 | pll12时钟频率(MHz) |
示例:
[clock] pll4 = 297 pll8 = 297 pll9 = 384 pll12 = 297
3.2.12 [pm_para]
| 配置项 | 配置项含义 | |:---|:---|``` |standby_mode | 1 :支持super standby 0:支持normal standby|
示例:
[pm_para] standby_mode = 1
3.3 DRAM.
3.3.1 [dram_para]
| 配置项 | 配置项含义 |
|---|---|
| dram_clk | DRAM的时钟频率,单位为MHz;它为 24 的整数倍,最低不得低于 120 |
| dram_type | DRAM类型: 2 为DDR2, 3 为DDR |
| dram_zq | DRAM控制器内部参数,由原厂来进行调节,请勿修改 |
| dram_odt_en | ODT是否需要使能 0 :不使能 1 :使能,一般情况下,为了省电,此项为 0 |
| dram_para1 | DRAM控制器内部参数,由原厂来进行调节,请勿修改 |
| dram_para2 | DRAM控制器内部参数,由原厂来进行调节,请勿修改 |
| dram_mr0 DRAM | CAS值,可为 6 , 7 , 8 , 9 ;具体需根据DRAM的规格书和速度来确定 |
| dram_mr | DRAM控制器内部参数,由原厂来进行调节,请勿修改 |
示例:
[dram_para] dram_clk = 648 dram_type = 7 dram_zq = 0x3b3bfb dram_odt_en = 0x dram_para1 = 0x10e410e dram_para2 = 0x dram_mr0 = 0x dram_mr1 = 0x dram_mr2 = 0x dram_mr3 = 0x dram_tpr0 = 0x0048A dram_tpr1 = 0x01b1a94b dram_tpr2 = 0x dram_tpr3 = 0xB47D7D dram_tpr4 = 0x dram_tpr5 = 0x dram_tpr6 = 0x dram_tpr7 = 0x2406C1E dram_tpr8 = 0x dram_tpr9 = 0 dram_tpr10 = 0x dram_tpr11 = 0x dram_tpr12 = 0x dram_tpr13 = 0x
3.4 Ethernet MAC Controller
3.4.1 [gmac_para]
| 配置项 | 配置项含义 |
|---|---|
| gmac_used | 是否使用Ethernet |
| gmac_txd | 发送数据GPIO配置 |
| gmac_txclk | 发送时钟信号 |
| gmac_txen | 发送使能信号 |
| gmac_gtxclk | gtx时钟信号 |
| gmac_rxd | 接收数据GPIO配置 |
| gmac_rxdv | 接收有效指示 |
| gmac_rxclk | 接收时钟信号 |
| gmac_txerr | 接收出错指示 |
| gmac_col | 冲突检测 |
| gmac_crs | crs GPIO配置 |
| gmac_clkin | clkin GPIO配置 |
| gmac_mdc | 配置接口时钟 |
| gmac_mdio | 配置接口I/O |
示例:
gmac_used = 0 gmac_txd0 = port:PA00<2> gmac_txd1 = port:PA01<2> gmac_txd2 = port:PA02<2> gmac_txd3 = port:PA03<2> gmac_txd4 = port:PA04<2> gmac_txd5 = port:PA05<2> gmac_txd6 = port:PA06<2> gmac_txd7 = port:PA07<2> gmac_txclk = port:PA08<2> gmac_txen = port:PA09<2> gmac_gtxclk = port:PA10<2> gmac_rxd0 = port:PA11<2> gmac_rxd1 = port:PA12<2> gmac_rxd2 = port:PA13<2> gmac_rxd3 = port:PA14<2> gmac_rxd4 = port:PA15<2> gmac_rxd5 = port:PA16<2> gmac_rxd6 = port:PA17<2> gmac_rxd7 = port:PA18<2> gmac_rxdv = port:PA19<2> gmac_rxclk = port:PA20<2> gmac_txerr = port:PA21<2> gmac_rxerr = port:PA22<2> gmac_col = port:PA23<2> gmac_crs = port:PA24<2> gmac_clkin = port:PA25<2> gmac_mdc = port:PA26<2> gmac_mdio = port:PA27<2>
3.5 I2C总线
3.5.1 [twi]
| 配置项 | 配置项含义 |
|---|---|
| twiX_used | TWI使用控制: 1 使用, 0 不用 |
| twiX_scl | TWI SCK的GPIO配置 |
| twiX_sda | TWI SDA的GPIO配置 |
示例:
[twi0] twiX_used = 1 twiX_scl = port:PB00<2> twiX_sda = port:PB01<2>
3.6 串口(UART)
3.6.1 [uart]
| 配置项 | 配置项含义 |
|---|---|
| uart_used | UART使用控制: 1 使用, 0 不用 |
| uart_port | UART端口号 |
| uart_type | UART类型,有效值为:2/4/8;表示2/4/8线模式 |
| uartX_tx | UART TX的GPIO配置 |
| uartX_rx | UART RX的GPIO配置 |
| uartX_rts | UART RTS的GPIO配置 |
| uartX_cts | UART CTS的GPIO配置 |
| uartX_dtr | UART DTR的GPIO配置 |
| uartX_dsr | UART DSR的GPIO配置 |
| uartX_dcd | UART DCD的GPIO配置 |
| uartX_ring | UART RING的GPIO配置 |
示例:
[uart1] uart1_used = 0 uart1_port = 1uart1_type = 8 uart1_tx = port:PA10<4><1> uart1_rx = port:PA11<4><1> uart1_rts = port:PA12<4><1> uart1_cts = port:PA13<4><1> uart1_dtr = port:PA14<4><1> uart1_dsr = port:PA15<4><1> uart1_dcd = port:PA16<4><1> uart1_ring = port:PA17<4><1>
3.7 SPI总线
3.7.1 [spi]
| 配置项 | 配置项含义 |
|---|---|
| spiX_used | SPI使用控制: 1 使用, 0 不用 |
| spiX_cs_number | spiX片选个数,最多 2 个 |
| spiX_cs_bitmap | 由于SPI控制器支持多个CS,这一个参数表示CS的掩码 |
| spiX_cs0 | SPI CS0的GPIO配置 |
| spiX_cs1 | SPI CS1的GPIO配置 |
| spiX_sclk | SPI CLK的GPIO配置 |
| spiX_mosi | SPI MOSI的GPIO配置 |
| spiX_miso | SPI MISO的GPIO配置 |
示例:
[spi0] spi0_used = 0 spi0_cs_number = 2 spi0_cs_bitmap = 3 spi0_cs0 = port:PC23<3><1> spi0_cs1 = port:PI14<2><1> spi0_sclk = port:PC2<3> spi0_mosi = port:PC0<3> spi0_miso = port:PC1<3>
3.7.2 [spiX/spi_boardX]
| 配置项 | 配置项含义 |
|---|---|
| compatible | 设备名称 |
| spi-max-frequency | 工作最大频率 |
| reg | 片选 |
| spi-cpha | 时钟相位 |
| spi-cpol | 时钟极性 |
| spi-cs-high | 默认 0 ,为 1 表示flash的片选为high active |
示例:
[spi0/spi_board0] compatible = "m25p80" spi-max-frequency = 1000000 reg = 0 ;spi-cpha ;spi-cpol ;spi-cs-high
3.8 gpadc
3.8.1 [gpadc]
| 配置项 | 配置项含义 |
|---|---|
| gpadc_used whether | use gpadc or not |
| channel_num | maxinum number of channels supported on theplatform. |
| channel_select | channel enable setection. channel0:0x01 channel1:0x02 channel2:0x04 channel3:0x08 |
| channel_data_select | channel data enable. channel0:0x01 channel1:0x02 channel2:0x04 channel3:0x08. |
| channel_compare_select | compare function enable channel0:0x01 channel1:0x02 channel2:0x04 channel3:0x08. |
| channel_cld_select | compare function low data enable setection: channel0:0x01 channel1:0x02 |
| channel_chd_select | compare function hig data enable setection: channel0:0x01 channel1:0x02 |
示例:
[gpadc] gpadc_used = 1 channel_num = 1 channel_select = 0x01 channel_data_select = 0 channel_compare_select = 0x01 channel_cld_select = 0x01 channel_chd_select = 0 channel0_compare_lowdata = 1700000 channel0_compare_higdata = 1200000 key_cnt = 5 key0_vol = 115 key0_val = 115 key1_vol = 240 key1_val = 114 key2_vol = 360 key2_val = 139 key3_vol = 480 key3_val = 28 key4_vol = 600 key4_val = 102
3.9 触摸屏配置.
3.9.1 [rtp_para].
| 配置项 | 配置项含义 |
|---|---|
| rtp_used | 该模块在方案中是否启用 |
|rtp_screen_size |屏幕尺寸设置,以斜对角方向长度为准,以寸为单位、 |rtp_regidity_level |表屏幕的硬度,以指覆按压,抬起时开始计时,多少个10ms时间单位之后,硬件采集不到数据为准;通常,我们建议的屏, 5寸屏设为 5 , 7 寸屏设为 7 ,对于某些供应商提供的屏,硬度可能不合要求,需要适度调整| |rtp_press_threshold_enable | 是否开启压力的门限制,建议选 0 不开启| |rtp_press_threshold |这配置项当rtp_press_threshold_enable为 1 时才有效,其数值可以是 0 到0xFFFFFF的任意数值,数值越小越敏感,推荐值为0xF| |rtp_sensitive_level |敏感等级,数值可以是 0 到0xF之间的任意数值,数值越大越敏感,0xF为推荐值| |rtp_exchange_x_y_flag |当屏的x,y轴需要转换的时候,这个项目该置 1 ,一般情况下则该置 0|
示例:
[rtp_para] rtp_used = 0 rtp_screen_size = 5 rtp_regidity_level = 5 rtp_press_threshold_enable = 0 rtp_press_threshold = 0x1f40 rtp_sensitive_level = 0xf rtp_exchange_x_y_flag = 0
3.9.2 [ctp]
| 配置项 | 配置项含义 |
|---|---|
| ctp_used | 该选项为是否开启电容触摸,支持的话置 1 ,反之置 0 |
| ctp_name | tp的name,必须配,与驱动保持一致 |
| ctp_twi_id | 用于选择i2c adapter,可选 1 , 2 |
| ctp_twi_addr | 指明i2c设备地址,与具体硬件相关 |
| ctp_screen_max_x | 触摸板的x轴最大坐标 |
| ctp_screen_max_y | 触摸板的y轴最大坐标 |
| ctp_revert_x_flag | 是否需要翻转x坐标,需要则置 1 ,反之置 0 |
| ctp_revert_y_flag | 是否需要翻转y坐标,需要则置 1 ,反之置 0 |
| ctp_exchange_x_y_flag | 是否需要x轴y轴坐标对换 |
| ctp_int_port | 电容屏中断信号的GPIO配置 |
| ctp_wakeup | 电容屏唤醒信号的GPIO配置 |
| ctp_power_ldo | 电容屏供电ldo |
| ctp_power_ldo_vol | 电容屏供电ldo电压 |
| ctp_power_io | 当电容屏供电gpio |
示例:
[ctp] ctp_used = 1 ctp_twi_id = 1 ctp_twi_addr = 0x5d ctp_screen_max_x = 1280 ctp_screen_max_y = 800 ctp_revert_x_flag = 1 ctp_revert_y_flag = 1 ctp_exchange_x_y_flag = 1 ctp_int_port = port:PI10<6> ctp_wakeup = port:PH10<1><1> ctp_power_ldo = "vcc-ctp" ctp_power_ldo_vol = 3300 ctp_power_io =
3.9.3 [acc_gpio].
| 配置项 | 配置项含义 |
|---|---|
| compatible | 设备名字 |
| acc_gpio_used | 该选项是否开启, 1 :开启, 0 :关闭 |
| acc_int acc | gpio配置引脚,用作判断是否需要进入睡眠 |
示例:
[acc_gpio] compatible = "allwinner,sunxi-acc-det" acc_gpio_used = 1 acc_int = port:power0<6>
3.9.4 [ctp_list].
| 配置项 | 配置项含义 |
|---|---|
| ctp_det_used | 支持触摸屏list |
| ft5x_ts | 是否支持ft5x_ts模组 |
| gt82x | 是否支持gt82x模组 |
| gslX680 | 是否支持gslX680模组 |
| gt9xx_ts | 是否支持gt9xx_ts模组 |
| gt9xxnew_ts | 是否支持gt9xxnew_ts模组 |
| gt811 | 是否支持gt811模组 |
| zet622x | 是否支持zet622x模组 |
| aw5306_ts | 是否支持d5306_ts模组 |
| ctp_det_used | 支持触摸屏list |
| tu_ts | |
| gt818ts | |
| icn83xx_ts |
示例:
[ctp_list] compatible = "allwinner,sun50i-ctp-list" ctp_det_used = 1 ft5x_ts = 1 gt82x = 1 gslX680 = 0 gslX680new = 1 gt9xx_ts = 1 gt9xxf_ts = 0tu_ts = 0 gt818_ts = 0 zet622x = 0 aw5306_ts = 0 icn83xx_ts = 0
3.10触摸按键
3.10.1 [tkey_para]
| 配置项 | 配置项含义 |
|---|---|
| tkey_used | 支持触摸按键的置 1 ,反之置 0 |
| tkey_twi_id | 用于选择i2c adapter,可选 1 , 2 |
| tkey_twi_addr | 指明i2c设备地址,与具体硬件相关 |
| tkey_int | 触摸按键中断信号的GPIO配置 |
示例:
[tkey_para] tkey_used = 0 tkey_twi_id = tkey_twi_addr = tkey_int =
3.11马达
3.11.1 [motor_para]
| 配置项 | 配置项含义 |
|---|---|
| motor_used | 是否启用马达,启用置 1 ,反之置 0 |
| motor_shake | 马达使用的GPIO配置 |
示例:
[motor_para] motor_used = 0 motor_shake = port:power3<1><1>
注意事项:
motor_shake = port:power3<1>
<1>
默认io口的输出应该为 1 ,这样就不会初始化之后就开始震动了。
假设motor_shake = 0,说明没有指定gpio引脚,那么就会设置axp的引脚为马达供电,优先考虑gpio配置。
3.12闪存
3.12.1 [nand_para]
| 配置项 | 配置项含义 |
|---|---|
| nand_support_2ch | nand0是否使能双通道 |
| nand0_used | nand0模块使能标志 |
| nand0_we | nand0写时钟信号的GPIO配置 |
| nand0_ale | nand0地址使能信号的GPIO配置 |
| nand0_cle | nand0命令使能信号的GPIO配置 |
| nand0_ce1 | nand0片选 1 信号的GPIO配置 |
| nand0_ce0 | nand0片选 0 信号的GPIO配置 |
| nand0_nre | nand0读时钟信号的GPIO配置 |
| nand0_rb0 | nand0 Read/Busy 1信号的GPIO配置 |
| nand0_rb1 | nand0 Read/Busy 0信号的GPIO配置 |
| nand0_d[X] | nand0数据总线信号的GPIO配置,[X]=0, 1 ,2... |
| nand0_nwp | |
| nand0_ce[X] | nand0片选[X]信号的GPIO配置,[X]=0, 1 ,2... |
| nand0_ndqs | |
| nand0_regulator1 | |
| nand0_regulator2 | |
| nand0_cache_level | |
| nand0_flush_cache_num | |
| nand0_capacity_level | |
| nand0_id_number_ctl | |
| nand0_print_level | |
| nand0_p0 | |
| nand0_p1 | |
| nand0_p2 | |
| nand0_p3 |
示例:
[nand0_para] nand0_support_2ch = 0 nand0_used = 1 nand0_we = port:PC00<2><0><1> nand0_ale = port:PC01<2><0><1> nand0_cle = port:PC02<2><0><1> nand0_ce1 = port:PC03<2><1><1> nand0_ce0 = port:PC04<2><1><1> nand0_nre = port:PC05<2><0><1> nand0_rb0 = port:PC06<2><1><1> nand0_rb1 = port:PC07<2><1><1> nand0_d0 = port:PC08<2><0><1> nand0_d1 = port:PC09<2><0><1> nand0_d2 = port:PC10<2><0><1> nand0_d3 = port:PC11<2><0><1> nand0_d4 = port:PC12<2><0><1> nand0_d5 = port:PC13<2><0><1> nand0_d6 = port:PC14<2><0><1> nand0_d7 = port:PC15<2><0><1> nand0_nwp = port:PC16<2><1><1> nand0_ce2 = port:PC17<2><1><1> nand0_ce3 = port:PC18<2><1><1> nand0_ce4 = port:PC19<2><1><1> nand0_ce5 = port:PC20<2><1><1> nand0_ce6 = port:PC21<2><1><1> nand0_ce7 = port:PC22<2><1><1> nand0_ndqs = port:PC24<2><0><1> nand0_regulator1 = "vcc-nand" nand0_regulator2 = "none" nand0_cache_level = 0x55aaaa55 nand0_flush_cache_num = 0x55aaaa55 nand0_capacity_level = 0x55aaaa55 nand0_id_number_ctl = 0x55aaaa55 nand0_print_level = 0x55aaaa55 nand0_p0 = 0x55aaaa55 nand0_p1 = 0x55aaaa55 nand0_p2 = 0x55aaaa55 nand0_p3 = 0x55aaaa55
3.13显示
3.13.1 [boot_disp]
| 配置项 | 配置项含义 |
|---|---|
| output_disp | 支持显示用户自定义bootlogo |
| output_type | 1:LCD 2:TV 3:HDMI 4:VGA |
| output_mode | (用于tv/hdmi输出,0:480i,1:576i,2:480p,3:576p 4:720p50,5:720p60,6:1080i50,7:1080i60, 8:1080p24,9:1080p5,10:1080p60,11:pal 14:ntsc) |
3.13.2 [disp].
| 配置项 | 配置项含义 |
|---|---|
| disp_init_enable | 是否进行显示的初始化设置 |
| disp_mode | 显示模式:0:screen01:screen1,fb0>,fb0> |
| screen_output_type | 屏 0 输出类型(0:none; 1:lcd; 2:tv; 3:hdmi; 4:vga) |
| screen_output_mode | 屏 0 输出模式(用于tv/hdmi输出,0:480i 1:576i 2:480p 3:576p 4:720p50 5:720p60 6:1080i50 7:1080i60 8:1080p24 9:1080p50 10:1080p60 11:pal 14:ntsc) |
| screen_output_format | 0:RGB 1:yuv444 2:yuv422 3:yuv420 |
| screen_output_bits | 0:8bit 1:10bit 2:12bit 2:16bit |
| screen_output_eotf | 0:reserve 4:SDR 16:HDR10 18:HLG |
| screen_output_cs | 0:undefined 257:BT709 260:BT601 263:BT2020 |
| fb_format | fb的格式(0:ARGB 1:ABGR 2:RGBA 3:BGRA) |
| fb_width | fb的宽度,为 0 时将按照输出设备的分辨率 |
| fb_height | fb的高度,为 0 时将按照输出设备的分辨率 |
| lcd_backlight | lcd的背光初始值,0~55 |
| lcd_bright | lcd的亮度值,0~100 |
| lcd_contrast | lcd的对比度,0~100 |
| lcd_saturation | lcd的饱和度,0~100 |
| lcd_hue | lcd的色度,0~100 |
示例:
[disp] disp_init_enable = 1 disp_mode = 0 screen0_output_type = 1 screen0_output_mode = 5 screen1_output_type = 3 screen1_output_mode = 4 fb0_format = 0 fb0_width = 0 fb0_height = 0 fb1_format = 0 fb1_width = 0 fb1_height = 0 lcd0_backlight = 50 lcd1_backlight = 50lcd0_bright = 50 lcd0_contrast = 50 lcd0_saturation = 57 lcd0_hue = 50 lcd1_bright = 50 lcd1_contrast = 50 lcd1_saturation = 57 lcd1_hue = 50
3.13.3 [edp]
| 配置项 | 配置项含义 |
|---|---|
| used whether | use edp0 or not |
| edp_io_power | power of edp controller |
| edp_x width | in panel’s resolution |
| edp_y height | in panel’s resolution |
| edp_hbp | horizon back porch(pixel) |
| edp_ht | horizon totoal(pixel) |
| edp_hspw | horizon sync pulse width(pixel) |
| edp_vbp | vertical back porch(line) |
| edp_vt | vertical totoal (line) |
| edp_vspw | vertical sync pulse width(line) |
| edp_rate | (0:1.62 Gbps, 1:2.7 Gbps, 2:5.4 Gbps) |
| edp_lane | number of lanes of panel |
| edp_fps | frame per second of panel |
| edp_colordepth | color depth of panel.(0:8 bits, 1:6 bits) |
示例:
[edp0] used=1 edp_io_power = "vcc-edp" edp_x=2048 edp_y=1536 edp_hbp=10 edp_ht=2208 edp_hspw=5 edp_vbp=10 edp_vt=1570 edp_vspw=1 edp_rate=0 edp_lane=4 edp_fps=60 edp_colordepth=0
3.13.4 [lcd_suspend]
| 配置项 | 配置项含义 |
|---|---|
| lcdd | lcd数据线信号休眠状态下的GPIO配置 |
示例:
[lcd0_suspend] ;lcdd0 = port:PD00<7><0> ;lcdd1 = port:PD01<7><0> ;lcdd2 = port:PD02<7><0> ;lcdd3 = port:PD03<7><0> ;lcdd4 = port:PD04<7><0> ;lcdd5 = port:PD05<7><0> ;lcdd6 = port:PD06<7><0> ;lcdd7 = port:PD07<7><0> ;lcdd8 = port:PD08<7><0> ;lcdd9 = port:PD09<7><0>
3.13.5 [car_reverse]
| 配置项 | 配置项含义 |
|---|---|
| compatible | 匹配设备的token |
| used | 模块使用配置项 |
| tvd_id | 倒车模块使用的tvd通道 |
| screen_width | 倒车预览图像宽度 |
| screen_height | 倒车预览图像高度 |
| rotation | 是否使能旋转 |
| reverse_pin | 倒车信号输入管脚 |
示例:
[car_reverse] compatible = "allwinner,sunxi-car-reverse" used = 1 tvd_id = 0 screen_width = 720 screen_height = 480 rotation = 1 reverse_pin = port:PH20<6><0>
3.13.6 [lcd].
| 配置项 | 配置项含义 |
|---|---|
| lcd_used | 是否使用lcd0 |
| lcd_driver_name | 定义驱动名称 |
| lcd_bl_0_percent | |
| lcd_bl_40_percent | |
| lcd_bl_100_percent | |
| cd_backlight | LCD背光值 |
| lcd_if | lcd接口(0:hv(sync+de); 1:8080; 2:ttl; 3:lvds,4:dsi;5:edp) |
| lcd_x | lcd分辨率x |
| lcd_y | lcd分辨率y |
| lcd_width | lcd屏宽度 |
| lcd_height | lcd屏高度 |
| lcd_dclk_freq | lcd频率 |
| lcd_pwm_used | pwm是否使用 |
| lcd_pwm_ch | pwm通道 |
| lcd_pwm_freq | pwm频率 |
| lcd_pwm_pol | pwm属性,0:positive; 1:negative |
| lcd_pwm_max_limit | pwm最大值 |
| lcd_hbp | lcd行后沿时间 |
| lcd_ht | lcd行时间 |
| lcd_hspw | lcd行同步脉宽 |
| lcd_vbp | lcd场后沿时间 |
| lcd_vt | lcd场时间 |
| lcd_vspw | lcd场同步脉宽 |
| lcd_dsi_if | |
| lcd_dsi_lane | |
| lcd_dsi_format | |
| lcd_dsi_te | |
| lcd_dsi_eotp | |
| lcd_lvds_if | lcd lvds接口,0:single link; 1:dual link |
| lcd_lvds_colordepth lcd | lvds颜色深度0:8bit; 1:6bit |
| lcd_lvds_mode lcd | lvds模式,0:NS mode; 1:JEIDA mode |
| lcd_frm | lcd格式,0:disable; 1:enable rgb666 dither; 2:enablergb656 dither |
| lcd_io_phase | |
| lcd_hv_clk_phase | lcd hv时钟相位0:0 degree; 1:90 degree; 2: 180 degree; 3:270 degree |
| lcd_hv_sync_polarity | lcd io属性,0:not invert; 1:invert |
| lcd_gamma_en | lcdgamma校正使能 |
| lcd_bright_curve_en | lcd亮度曲线校正使能 |
| lcd_cmap_en | lcd调色板函数使能 |
| deu_mode | deu模式0:smoll lcd screen; 1:large lcd screen(largerthan 10inch) |
| lcdgamma4iep | 使能背光参数,lcd gamma vale*10;decrease it while lcd is |
| not bright | enough; increase while lcd is too bright |
| lcd_dsi_port_num | |
| lcd_tcon_mode | |
| lcd_slave_stop_pos | |
| lcd_sync_pixel_num | |
| lcd_sync_line_num | |
| smart_color | 丽色系统,90:normal lcd screen 65:retina lcd screen(9.7inch) |
| lcd_bl_en | 背光使能的GPIO配置 |
| lcd_power | lcd电源 |
| lcd_gpio_ | lcd数据线信号的GPIO配置 |
示例:
[lcd0] lcd_used = 1 lcd_driver_name = "S070WV20_MIPI_RGB" lcd_backlight = 50 lcd_if = 4 lcd_x = 800 lcd_y = 480 lcd_width = 86 lcd_height = 154 lcd_dclk_freq = 20 lcd_pwm_used = 1 lcd_pwm_ch = 0 lcd_pwm_freq = 50000 lcd_pwm_pol = 1 lcd_pwm_max_limit = 255 lcd_hbp = 88 lcd_ht = 928 lcd_hspw = 48 lcd_vbp = 32 lcd_vt = 525 lcd_vspw = 3 lcd_frm = 0 lcd_cmap_en = 0 lcd_dsi_if = 0 lcd_dsi_lane = 4 lcd_dsi_format = 0 lcd_dsi_te = 0 deu_mode = 0lcdgamma4iep = 22 smart_color = 90 lcd_bl_en = port:PH16<1><0><2><1> lcd_power = "vcc-3v" ;lcd_power = "vcc-mipi" lcd_gpio_0 = port:PH17<1><0><2><1> lcd_gpio_1 = port:PH18<1><0><2><1>
3.14 PWM
3.14.1 [pwm]
| 配置项 | 配置项含义 |
|---|---|
| pwm_used | 是否使用PWM0 |
| pwm_positive | PWM输出GPIO配置 |
示例:
[pwm0] pwm_used = 1 pwm_positive = port:PB2<3><0>
3.14.2 [pwm_suspend].
| 配置项 | 配置项含义 |
|---|---|
| pwm_suspend | pwm suspend |
示例:
pwm_positive = port:PB2<3><0>
3.14.3 [spwm]
| 配置项 | 配置项含义 |
|---|---|
| s_pwm_used | 是否使用s_pwm |
| pwm_positive | PWM 输出GPIO配置 |
示例:
pwm_positive = port:PL16<2><0>
3.14.4 [spwm_suspend]
| 配置项 | 配置项含义 | |:---|:---| |s_pwm_suspend |s_pwm suspend
3.15 HDMI.
3.15.1 [hdmi]
| 配置项 | 配置项含义 |
|---|---|
| hdmi_used | 是否使用hdmi。 1 :使用;0:不使用 |
| hdmi_hdcp_enable | 是否使能hdcp |
| hdmi_cts_compatibility | cts兼容性使能设置 |
| hdmi_power | 内核阶段hdmi电源配置 |
示例:
[hdmi] hdmi_used = 1 hdmi_hdcp_enable = 0 hdmi_cts_compatibility = 0
3.16 tvd摄像头
3.16.1 [tvd]
| 配置项 | 配置项含义 |
|---|---|
| tvd_used | 是否使用TVD。 1 :使用;0:不使用 |
| tvd_if | tvd interface 0:CVBS,1:YPBPRI,2: YPBPRP |
| fliter_used | 使能3D滤波功能,设置为 1 |
| cagc_enable | 使能cagc功能,设置为 1 |
| 配置项 | 配置项含义 |
|---|---|
| agc_auto_enable | 使能agc功能,设置为 1 |
| tvd_power0 AXP | power,具体参考原理图配置 |
| tvd_hot_plug | 支持TVD动态插拔功能,1 to enable hot plug function, 0 to disable,default disable |
| tvd_gpio0 | gpio control power output or not |
示例:
[tvd0] tvd_used = 1 tvd_if = 0 fliter_used = 1 cagc_enable = 1 agc_auto_enable = 1
3.17 vind摄像头.
3.17.1 [vind].
| 配置项 | 配置项含义 |
|---|---|
| vind0_used | Vin框架使能配置 |
示例:
[tvd0] tvd_used = 1 tvd_if = 0 fliter_used = 1 cagc_enable = 1 agc_auto_enable = 1
3.17.2 [vind/csi].
| 配置项 | 配置项含义 |
|---|---|
| csi0_used | vin框架对应的csi使能配置 |
| csi0_pck | csi pclock时钟GPIO配置 |
| csi0_hsync | hsync信号GPIO配置 |
| csi0_vsync | vsync信号GPIO配置 |
| csi0_d | csi数据引脚GPIO配置 |
示例:
[vind0/csi0] csi0_used = 1 csi0_pck = port:PE00<2> csi0_hsync = port:PE02<2> csi0_vsync = port:PE03<2> csi0_d0 = port:PE04<2> csi0_d1 = port:PE05<2> csi0_d2 = port:PE06<2> csi0_d3 = port:PE07<2> csi0_d4 = port:PE08<2> csi0_d5 = port:PE09<2> csi0_d6 = port:PE10<2> csi0_d7 = port:PE11<2>
3.17.3 [vind/csi_cci]
| 配置项 | 配置项含义 |
|---|---|
| csi_cci0_used | csi的cci使能配置 |
| csi_cci0_sck | cci的i2c通信sck GPIO配置 |
| csi_cci0_sda | cci的i2c通信sda GPIO配置 |
示例:
[vind0/csi_cci0] csi_cci0_used = 1 csi_cci0_sck = port:PE12<2> csi_cci0_sda = port:PE13<2>`
3.17.4 [vind/flash].
| 配置项 | 配置项含义 |
|---|---|
| flash0_used | vin框架对应的闪光灯使能配置 |
| flash0_type | 闪光灯的类型 |
| flash0_en | 闪光灯使能 |
| flash0_mode | 闪光灯工作模式 |
| flash0_flvdd | 闪光灯电压配置 |
| flash0_flvdd_vol | 闪光灯电压值 |
示例:
[vind0/flash0] flash0_used = 1 flash0_type = 2 flash0_en = flash0_mode = flash0_flvdd = "" flash0_flvdd_vol =
3.17.5 [vind/actuator]
| 配置项 | 配置项含义 |
|---|---|
| actuator0_used | 对焦马达使能配置 |
| actuator0_name | 对焦马达名称 |
| actuator0_slave | 对焦马达的i2c地址 |
| actuator0_af_pwdn | 对焦马达的pwm控制 |
| actuator0_afvdd | 对焦马达电压配置 |
| actuator0_afvdd_vol | 对焦马达电压配置值 |
示例:
[vind0/actuator0] actuator0_used = 0 actuator0_name = "ad5820_act" actuator0_slave = 0x18 actuator0_af_pwdn = actuator0_afvdd = "afvcc-csi" actuator0_afvdd_vol = 2800000
3.17.6 [vind/sensor]
| 配置项 | 配置项含义 |
|---|---|
| sensor1_used | sensor使能控制 |
| sensor1_mname | sensor名称,需要和驱动文件的对应 |
| sensor1_twi_cci_id | sensor通信使用的twi索引 |
| sensor1_twi_addr | sensor的i2c地址 |
| sensor1_pos | sensor索引 |
| sensor1_isp_used | sensor的ISP使能 |
| sensor1_fmt | sensor的数据格式 |
| sensor1_stby_mode | sensor的stby模式选择 |
| sensor1_vflip | sensor垂直镜像使能配置 |
| sensor1_hflip | sensor水平镜像使能配置 |
| sensor1_iovdd | sensor io电压配置 |
| sensor1_iovdd_vol | sensor io电压值 |
| sensor1_avdd | sensor avdd电压配置 |
| sensor1_avdd_vol | sensor avdd电压值 |
| sensor1_dvdd | sensor dvdd电压配置 |
| sensor1_dvdd_vol | sensor dvdd电压值 |
| sensor1_power_en | sensor电源使能 |
| sensor1_reset | sensor reset GPIO配置 |
| sensor1_pwdn | sensor pwdn GPIO配置 |
示例:
sensor1_used = 1 sensor1_mname = "ov5647" sensor1_twi_cci_id = 0 sensor1_twi_addr = 0x6c sensor1_pos = "front" sensor1_isp_used = 0 sensor1_fmt = 0 sensor1_stby_mode = 1 sensor1_vflip = 0 sensor1_hflip = 0 sensor1_iovdd = "iovdd-csi" sensor1_iovdd_vol = 2800000 sensor1_avdd = "avdd-csi" sensor1_avdd_vol = 2800000 sensor1_dvdd = "dvdd-csi" sensor1_dvdd_vol = 1800000 sensor1_power_en = sensor1_reset = port:PE16<0><0><1><0> sensor1_pwdn = port:PE17<0><0><1><0>
3.17.7 [vind/vinc]
| 配置项 | 配置项含义 |
|---|---|
| vinc_used | vin core使能配置 |
| vinc_csi_sel | vin core对应的csi索引 |
| vinc_mipi_sel | vin core对应的mipi索引 |
| vinc_isp_sel | vin core对应的isp索引 |
| vinc_rear_sensor_sel | vin core对应的rear sensor索引 |
| vinc_front_sensor_sel | vin core对应的front sensor索引 |
| vinc_sensor_list | vin core对应的sensor列表 |
示例:
[vind0/vinc1] vinc1_used = 1 vinc1_csi_sel = 0 vinc1_mipi_sel = 0xff vinc1_isp_sel = 0 vinc1_rear_sensor_sel = 0 vinc1_front_sensor_sel = 1 vinc1_sensor_list = 0
3.18摄像头(CSI)
3.18.1 [csi].
| 配置项 | 配置项含义 |
|---|---|
| csi_used | 摄像头使能配置 |
| csi_sensor_list | |
| csi_pck | pclk信号的GPIO配置 |
| csi_mck | mclk信号的GPIO配置 |
| csi_hsync | hsync信号的GPIO配置 |
| csi_vsync | vsync信号的GPIO配置 |
| csi_d | csi d信号的GPIO配置 |
示例:
[csi0] csi0_used = 1 csi0_sensor_list = 0 csi0_pck = port:PE00<3> csi0_mck = port:PE01<1><0><1><0> csi0_hsync = port:PE02<3> csi0_vsync = port:PE03<3> csi0_d0 = port:PE04<3> csi0_d1 = port:PE05<3> csi0_d2 = port:PE06<3> csi0_d3 = port:PE07<3>csi0_d4 = port:PE08<3> csi0_d5 = port:PE09<3> csi0_d6 = port:PE10<3> csi0_d7 = port:PE11<3>
3.18.2 [csi/csi0_dev0]
| 配置项 | 配置项含义 |
|---|---|
| csi_dev0_used | 是否使用csi0_dev0 |
| csi_dev0_mname | 设置sensor 0名称 |
| csi_dev0_twi_addr | 请参考实际原理图填写 |
| csi_dev0_twi_id | 请参考实际模组的8bit ID填写 |
| csi_dev0_pos | 摄像头位置前置填“front”,后置填“rear” |
| csi_dev0_isp_used | YUV填 0 |
| csi_dev0_fmt | YUV填 0 |
|csidev0_stby_mode |填 0 |csidev0_vflip |Sensor图像垂直翻转| |csidev0_hflip |Sensor图像水平翻转| |csidev0_iovdd |IOVDD配置,请参考实际原理图填写| |csidev0_iovdd_vol |IOVDD电压值一般为2.8V(2800000)| |csidev0_avdd| AVDD配置,如”csi-avdd”| |csidev0_avdd_vol| AVDD电压值,一般为2.8V(2800000)| |csidev0_dvdd| DVDD配置,如“csi-dvdd”| |csidev0_dvdd_vol| DVDD电压值参考datasheet,1.2/1.5/1.8V| |csidev0_afvdd |Isp-dvdd配置,如isp-dvdd12| |csidev0_afvdd_vol| 电压值为1.2V| |csidev0_power_en |Sensor power enable引脚GPIO配置| |csidev0_reset |Sensor reset引脚GPIO配置| |csidev0_pwdn| Sensor power down引脚GPIO配置| |csidev0_flash_used |填 0| |csidev0_flash_type| 填 0| |csidev0_flash_en| 不需填写| |csidev0_flash_mode |不需填写| |csidev0_flvdd |不需填写| |csidev0_flvdd_vol |不需填写| |csidev0_af_pwdn |不需填写| |csidev0_act_used |不需填写| |csidev0_act_name |不需填写| |csidev0_act_slave| 不需填写|
示例:
[csi0/csi0_dev0] csi0_dev0_used = 1 csi0_dev0_mname = "ov5640" csi0_dev0_twi_addr = 0x78 csi0_dev0_twi_id = 4 csi0_dev0_pos = "rear" csi0_dev0_isp_used = 0 csi0_dev0_fmt = 0 csi0_dev0_stby_mode = 0 csi0_dev0_vflip = 0 csi0_dev0_hflip = 0 csi0_dev0_iovdd = "csi-iovcc" csi0_dev0_iovdd_vol = 2800000 csi0_dev0_avdd = "csi-avdd" csi0_dev0_avdd_vol = 2800000 csi0_dev0_dvdd = "csi-dvdd" csi0_dev0_dvdd_vol = 1500000 csi0_dev0_afvdd = "csi-afvcc" csi0_dev0_afvdd_vol = 2800000 csi0_dev0_power_en = csi0_dev0_reset = port:PI07<1><0><1><0> csi0_dev0_pwdn = port:PI06<1><0><1><0> csi0_dev0_flash_used = 0 csi0_dev0_flash_type = 2 csi0_dev0_flash_en = csi0_dev0_flash_mode = csi0_dev0_flvdd = "" csi0_dev0_flvdd_vol = csi0_dev0_af_pwdn = csi0_dev0_act_used = 0 csi0_dev0_act_name = "ad5820_act" csi0_dev0_act_slave = 0x18
3.19 tvout/tvin
3.19.1 [tvout_para].
| 配置项 | 配置项含义 |
|---|---|
| tvout_used | 是否使用tvout。 1 :使用 0 :不使用 |
| tvout_channel_num | 使用的tvout通道号 |
| tv_en | tvout通道使能 |
示例:
[tvout_para] tvout_used = tvout_channel_num = tv_en =
3.19.2 [tvin_para].
| 配置项 | 配置项含义 |
|---|---|
| tvin_used | 是否使用tvint。 1 :使用 0 :不使用 |
| tvin_channel_num | 使用的tvin通道号 |
示例:
[tvout_para] tvout_used = tvout_channel_num = tv_en =
3.19.3 [di]
| 配置项 | 配置项含义 |
|---|---|
| di_used 是否使用反交错。 | 1 :使用 0 :不使用 |
示例:
[di] di_used = 1
3.20 SD/MMC.
3.20.1 [sdc]
| 配置项 | 配置项含义 |
|---|---|
| sdc_used | SDC使用控制: 1 使用, 0 不用 |
| bus-width | 位宽:1-1bit,4-4bit,8-8bit |
| sdc_d | SDC DATA的GPIO配置 |
| sdc_clk | SDC CLK的GPIO配置 |
| sdc_cmd | SDC CMD的GPIO配置 |
| sdc_d | SDC DATA的GPIO配置 |
| sd-uhs-sdr50 | |
| sd-uhs-ddr50 | |
| sd-uhs-sdr104 | |
| broken-cd | |
| cd-inverted | |
| non-removable | |
| sdc_emmc_rst | |
| cd-gpios | SDC卡检测信号的GPIO配置 |
| card-pwr-gpios | |
| data3-detect | |
| sunxi-power-save-mode | SDC CLK信号无数据传输时暂停 |
| sunxi-dis-signal-vol-sw | |
| mmc-ddr-1_8v | |
| mmc-hs200-1_8v | |
| mmc-hs400-1_8v | |
| max-frequency | |
| sdc_tm4_sm0_freq0 | |
| sdc_tm4_sm0_freq1 | |
| sdc_tm4_sm1_freq0 | |
| sdc_tm4_sm1_freq1 | |
| sdc_tm4_sm2_freq0 | |
| sdc_tm4_sm2_freq1 | |
| sdc_tm4_sm3_freq0 | |
| sdc_tm4_sm3_freq1 | |
| sdc_tm4_sm4_freq0 | |
| sdc_tm4_sm4_freq1 | |
| vmmc | SDC供电电源配置 |
| vqmmc | SDC IO供电电源配置 |
| vdmmc | 是否是sdio card, 0 :不是, 1 :是 |
示例:
[sdc0] sdc0_used = 1 bus-width = 4 sdc0_d1 = port:PF00<2><1><2> sdc0_d0 = port:PF01<2><1><2> sdc0_clk = port:PF02<2><1><2> sdc0_cmd = port:PF03<2><1><2> sdc0_d3 = port:PF04<2><1><2> sdc0_d2 = port:PF05<2><1><2> cd-gpios = port:PH13<0><1><2> sunxi-power-save-mode = vmmc = "vcc-sdcv" vqmmc = "vcc-sdcvq33" vdmmc = "vcc-sdcvd"
注,以上仅说明常用配置项,未说明的配置项,可参考
linux-X.X/Documentation/devicetree/bindings/mmc/mmc.txt"
3.20.2 [smc]
| 配置项 | 配置项含义 |
|---|---|
| smc_used | 是否使用sim卡控制器。 1 :使用 0 :不使用 |
| smc_rst | rst gpio |
| smc_vppen | vppen gpio |
| smc_vppp | vppp gpio |
| smc_det | det gpio |
| smc_vccen | vccen gpio |
| smc_sck | sck gpio |
| smc_sda | sda gpio |
示例:
[smc_para] smc_used = 1 smc_rst = port:PA09<2> smc_vppen = port:PA20<3> smc_vppp = port:PA21<3> smc_det = port:PA10<2> smc_vccen = port:PA06<2> smc_sck = port:PA07<2> smc_sda = port:PA08<2>
3.21 [gpio_para]
| 配置项 | 配置项含义 |
|---|---|
| compatible | 该配置的名字 |
| gpio_used | 内核GPIO初始化使能功能, 1 :开启 0 :禁用 |
| gpio_num | GPIO引脚数目 |
| gpio_pin_1 | GPIO引脚配置 |
| gpio_pin_2 | GPIO引脚配置 |
| normal_led | 正常状态灯使用的GPIO |
| standby_led | 休眠状态灯使用的GPIO |
示例:
[gpio_para] compatible = "allwinner,sunxi-init-gpio" gpio_used = 1 gpio_num = 2 gpio_pin_1 = port:PL08<1><1> gpio_pin_2 = port:power0<1><0> normal_led = "gpio_pin_1" standby_led = "gpio_pin_2"
3.22 USB控制标志
3.22.1 [usbc].
| 配置项 | 配置项含义 |
|---|---|
| usb_used | USB使能标志(xx=1 or 0)。 1 表示系统中USB模块可用, 0 则表示系统USB禁用。此标志只对具体的USB控制器模块有效。 |
| usb_port_type | USB端口的使用情况。(xx=0/1/2) 0:device only 1:host only 2:OTG |
| usb_detect_type | USB端口的检查方式。 0 :无检查方式 1 :vbus/id检查 |
| usb_detect_mode | usb otg的检测方法,0-thread scan,1-id gpio interrupt |
| usb_id_gpio | USB ID pin脚配置 |
| usb_det_vbus_gpio | USB DET_VBUS pin脚配置 |
| usb_drv_vbus_gpio | USB DRY_VBUS pin脚配置 |
| usb_host_init_state | host only模式下,Host端口初始化状态。 0 :初始化后USB不工作 1 :初始化后USB工作 |
| usb_regulator_io | usb供电的regulator GPIO |
| usb_wakeup_suspend | 支持usb唤醒功能 0 :关闭usb唤醒功能 1 :当进入normal standby时候,支持usb唤醒(例如鼠标等外设) |
| usb_luns 使用mass storage功能时的盘符数量 | |
| usb_serial_unique | usb device的序列号是否唯一。 1 :唯一,使用chip id; 0:相同,由usb_serial_number指定 |
| usb_serial_number | usb device的序列号 |
示例:
[usbc0] usbc0_used = 1 usb_port_type = 2 usb_detect_type = 1 usb_detect_mode = 0 usb_id_gpio = port:PI4<0><1>usb_det_vbus_gpio = port:PI8<0><1> usb_drv_vbus_gpio = "axp_ctrl" usb_host_init_state = 0 usb_regulator_io = "nocare" usb_regulator_vol = 0 usb_wakeup_suspend = 0 ;--- USB Device usb_luns = 3 usb_serial_unique = 0 usb_serial_number = "20080411"
3.23 [serial_feature].
| 配置项 | 配置项含义 |
|---|---|
| sn_filename | 该配置的名字 |
示例:
[serial_feature] sn_filename = "ULI/factory/snum.txt"
3.24重力感应(G Sensor)
3.24.1 [gsensor_para]
| 配置项 | 配置项含义 |
|---|---|
| gsensor_used | 是否支持gsensor |
| gsensor_twi_id | I2C的BUS控制选择 0 :TWI0; 1:TWI1; 2:TWI2 |
| gsensor_twi_addr | 芯片的I2C地址 |
| gsensor_int1 | 中断 1 的GPIO配置 |
| gsensor_int2 | 中断 2 的GPIO配置 |
示例:
[gsensor_para] gsensor_used = 1 gsensor_twi_id = 2 gsensor_twi_addr = 0x18 gsensor_int1 = port:PA09<6><1> gsensor_int2 =
3.24.2 [gsensor_list]
| 配置项 | 配置项含义 |
|---|---|
| compatible | 配置名字 |
| gsensor_list_used | 是否支持gsensor list |
| da380 | 是否支持da380模组 |
示例:
[gsensor_list_para] compatible = "allwinner,sun50i-gsensor-list-para" gsensor_list__used = 1 da380 = 1
3.25 WiFi
3.25.1 [wlan]
| 配置项 | 配置项含义 | |wlan_used |是否要使用wifi| |compatible |wlan名称| |clocks |低功耗时钟,此值固定为&clk_outa| |wlan_power| wifi模组使用哪一路AXP供电| |wlan_io_regulator| wifi模组io使用哪一路AXP供电| |wlan_busnum |所使用的SDIO号,如使用的是SDIO1,则此值为 1| |wlan_regon |Wifi使能脚| |wlan_hostwake |wifi唤醒主控脚| |wlan_clk_gpio |wifi模块32K时钟输出硬件|
示例:
[wlan] wlan_used = 1 compatible = "allwinner,sunxi-wlan" clocks = "outa" wlan_power = "vcc-wifi" wlan_io_regulator = "vcc-io-wifi" wlan_busnum = 1 wlan_regon = port:PG10<1><1><1><0> wlan_hostwake = port:ower0<0>
3.26蓝牙(blueteeth).
3.26.1 [bt]
| 配置项 | 配置项含义 |
|---|---|
| bt_used | 蓝牙使用控制: 1 使用, 0 不用 |
| compatible | “allwinner,sunxi-bt” |
| clocks | 低功耗时钟,此值固定为&clk_outa |
| clock_io | 32K时钟的clock io |
| bt_power | bt模组使用哪一路AXP供电(通常情况下和wifi相同) |
| bt_io_regulator | bt模组io使用哪一路AXP供电(通常情况下和wifi相同) |
| bt_rst_n | uart电平转换芯片使能脚 |
示例:
[bt] bt_used = 1 compatible = "allwinner,sunxi-bt" clocks = "outa" pinctrl-names = "default" clock_io = port:PI12<4><0><0><0> bt_power = "vcc-wifi" bt_io_regulator = "vcc-io-wifi" bt_rst_n = port:PH12<1><1><1><0>
3.26.2 [btlpm].
| 配置项 | 配置项含义 |
|---|---|
| btlpm_used | 蓝牙使用控制: 1 使用, 0 不用 |
| uart_index | 使用的串口序号,如使用ttyS1,则此值为 1 |
| bt_wake | 主控唤醒bt引脚 |
| bt_host_wake | bt唤醒主控引脚 |
示例:
[btlpm] btlpm_used = 0 compatible = "allwinner,sunxi-btlpm" uart_index = 3 bt_wake = port:PG11<1><1><1><0> bt_host_wake = port:power1<0>
3.27光感(light sensor)
3.27.1 [ls_para]
| 配置项 | 配置项含义 |
|---|---|
| ls_used | 是否支持ls |
| ls_twi_id | I2C的BUS控制选择, 0 :TWI0;1:TWI1;2:TWI2 |
| ls_twi_addr | 芯片的I2C地址 |
| ls_int | 中断的GPIO配置 |
示例:
[ls_para] ls_used = 0 ls_twi_id = 1 ls_twi_addr = 0x23 ls_int = port:PB07<4><1>
3.28陀螺仪传感器(gyroscope sensor).
3.28.1 [gy_para]
| 配置项 | 配置项含义 |
|---|---|
| gy_used | 是否支持gyroscope |
| gy_twi_id | I2C的BUS控制选择,0:twi0;1:twi1;2:twi2 |
| gy_twi_addr | 芯片的I2C地址 |
| gy_int1 | 中断 1 的GPIO配置 |
| gy_int2 | 中断 2 的GPIO配置 |
示例:
[gy_para] gy_used = 1 gy_twi_id = 2 gy_twi_addr = 0x6a gy_int1 = port:PA10<6><1> gy_int2 =
3.29罗盘Compass
3.29.1 [compass_para].
| 配置项 | 配置项含义 |
|---|---|
| compass_used | 是否支持compass |
| compass_twi_id | I2C的BUS控制选择, 0 :TWI0;1:TWI1;2:TWI2 |
| compass_twi_addr | 芯片的I2C地址 |
| compass_int | 中断的GPIO配置 |
示例:
[compass_para] compass_used = 1 compass_twi_id = 2 compass_twi_addr = 0x0d compass_int = port:PA11<6><1>
3.30数字音频总线(SPDIF).
请参考音频相关文档
3.31内置音频codec
请参考音频相关文档
3.32 [s_cir0].
| 配置项 | 配置项含义 |
|---|---|
| s_cir0_used | 是否使能 |
| ir_power_key_code | power key码 |
| ir_addr_code0 | 地址码 |
| ir_addr_cnt | 地址数 |
示例:
[s_cir0] s_cir0_used = 1 ir_power_key_code = 0x0 ir_addr_code0 = 0x04 ir_addr_cnt = 0x1
3.33 PMU电源
3.33.1 [pmu].
| 配置项 | 配置项含义 |
|---|---|
| compatible | AXP名字 |
| used | 是否使用AXPxx: 0 :不使用, 1 :使用 |
| pmu_id | Pmu的id号 |
| reg Twi | id号 |
| pmu_vbusen_func | Vubs引脚 0 :输出 1 :输入 |
| pmu_reset | 长按16s, 0 :不操作 1 :重启 |
| pmu_irq_wakeup | 是否允许中断唤醒, 0 :not wake up 1:wakeup |
| pmu_hot_shutdowm | 是否允许pmu高温关机 |
| pmu_inshort | 启动是否检测电池电量 |
示例:
[pmu0] compatible = "axp221s" used = 1 pmu_id = 2 reg = 0x34 pmu_vbusen_func = 0 pmu_reset = 0 pmu_irq_wakeup = 1 pmu_hot_shutdowm = 1 pmu_inshort = 0 pmu_start = 0
3.33.2 [charger].
| 配置项 | 配置项含义 | |:---|:---| |compatible| AXP名字 |used| 是否使用AXPxx: 0 :不使用, 1 :使用| |pmu_bat_unused| 是否使用电池, 1 :不使用, 0 :使用| |pmu_chg_ic_temp |是否开启充电智能温度检测, 0 关闭, 1 开启| |pmu_battery_rdc |电池通路内阻,单位mΩ| |pmu_battery_cap |电池容量,单位mAh,如果配置改值,计量方式为库仑计方式,否则为电压方式。| |pmu_runtime_chgcur |设置开机时充电电流大小,单位mA,仅支持:300/450/600/750/900/1050/1200/1350/1500/1650/1800/1950/2100| |pmu_suspend_chgcur |设置待机时充电电流大小,单位mA,仅支持:300/4500/600/750/900/1050/1200/1350/1500/1650/1800/1950/2100| |pmu_shutdown_chgcur |设置关机时充电电流大小,单位mA,仅支持:300/4500/600/750/900/1050/1200/1350/ 1500/1650/1800/1950/2100| |pmu_init_chgvol |设置充电完成时电池目标电压,单位mV,仅支持:4100/4200/4220/4240| |pmu_ac_vol |usb-ac限制电压| |pmu_ac_cur| usb-ac限制电流| |pmu_usbpc_vol |usb-pc限制电压| |pmu_usbpc_cur |usb-pc限制电流| |pmu_battery_warning_level1 |低电量警告level1| |pmu_battery_warning_level2 |低电量警告level2| |pmu_chgled_func| CHGKED引脚控制。 0 :PMU 1:充电器| |pmu_chgled_type |CHGLED类型。 0 :Type A 1:Type B| |pmu_ocv_en|| |pmu_cou_en|| |pmu_update_min_time|| |pmu_bat_para1 |电池空载电压为3.13V对应的电量值| |pmu_bat_para2 |电池空载电压为3.27V对应的电量值| |pmu_bat_para3 |电池空载电压为3.34V对应的电量值| |pmu_bat_para4 |电池空载电压为3.41V对应的电量值| |pmu_bat_para5 |电池空载电压为3.58V对应的电量值| |pmu_bat_para6 |电池空载电压为3.52V对应的电量值| |pmu_bat_para7 |电池空载电压为3.55V对应的电量值| |pmu_bat_para8 |电池空载电压为3.57V对应的电量值| |pmu_bat_para9 |电池空载电压为3.59V对应的电量值| |pmu_bat_para10 |电池空载电压为3.61V对应的电量值| |pmu_bat_para11 |电池空载电压为3.63V对应的电量值| |pmu_bat_para12 |电池空载电压为3.64V对应的电量值| |pmu_bat_para13 |电池空载电压为3.66V对应的电量值| |pmu_bat_para14 |电池空载电压为3.7V对应的电量值| |pmu_bat_para15 |电池空载电压为3.73V对应的电量值| |pmu_bat_para16 |电池空载电压为3.77V对应的电量值| |pmu_bat_para17 |电池空载电压为3.78V对应的电量值| |pmu_bat_para18 |电池空载电压为3.8V对应的电量值| |pmu_bat_para19 |电池空载电压为3.82V对应的电量值| |pmu_bat_para20 |电池空载电压为3.84V对应的电量值| |pmu_bat_para21 |电池空载电压为3.85V对应的电量值| |pmu_bat_para22 |电池空载电压为3.87V对应的电量值| |pmu_bat_para23 |电池空载电压为3.91V对应的电量值| |pmu_bat_para24 |电池空载电压为3.94V对应的电量值| |pmu_bat_para25 |电池空载电压为3.98V对应的电量值| |pmu_bat_para26 |电池空载电压为4.01V对应的电量值| |pmu_bat_para27 |电池空载电压为4.05V对应的电量值| |pmu_bat_para28 |电池空载电压为4.08V对应的电量值| |pmu_bat_para29 |电池空载电压为4.1V对应的电量值| |pmu_bat_para30 |电池空载电压为4.12V对应的电量值| |pmu_bat_para31 |电池空载电压为4.14V对应的电量值| |pmu_bat_para32 |电池空载电压为4.15V对应的电量值| |pmu_bat_temp_enable |电池温度检测使能| |pmu_bat_charge_ltf |电池充电低温门限电压| |pmu_bat_charge_htf |电池充电高温门限电压| |pmu_bat_shutdown_ltf| 关机电池低温门限电压| |pmu_bat_shutdown_htf| 关机电池高温门限电压| |pmu_bat_temp_para1 |电池温度-25度对应的电压| |pmu_bat_temp_para2 |电池温度-15度对应的电压| |pmu_bat_temp_para3 |电池温度-10度对应的电压| |pmu_bat_temp_para4 |电池温度-5度对应的电压| |pmu_bat_temp_para5 |电池温度 0 度对应的电压| |pmu_bat_temp_para6 |电池温度 5 度对应的电压| |pmu_bat_temp_para7 |电池温度 10 度对应的电压| |pmu_bat_temp_para8 |电池温度 20 度对应的电压| |pmu_bat_temp_para9 |电池温度 30 度对应的电压| |pmu_bat_temp_para10|电池温度 40 度对应的电压| |pmu_bat_temp_para11|电池温度 45 度对应的电压| |pmu_bat_temp_para12|电池温度 50 度对应的电压| |pmu_bat_temp_para13|电池温度 55 度对应的电压| |pmu_bat_temp_para14|电池温度 60 度对应的电压| |pmu_bat_temp_para15|电池温度 70 度对应的电压| |pmu_bat_temp_para16|电池温度 80 度对应的电压| |power_start | 当充电状态下的关机动作。 1 :关机;非 1 :重启。当有接入电池的情况下,插入外部电源时: 0 :关机状态下,插入外部电源时,电池电量充足时,不允许开机,会进入充电模式;电池电量不足,则关机。 1 :关机状态下,插入外部电源,电池电量充足时,直接开机进入系统;电池电量不足,则关机。 2 :关机状态下,插入外部电源时,不允许开机,会进入充电模式;无视电池电量。 3 :关机状态下,插入外部电源,直接开机进入系统;无视电池电量。|
示例:
[charger0] compatible = "axp221s-charger" pmu_chg_ic_temp = 0 pmu_battery_rdc = 100 pmu_battery_cap = 0 pmu_runtime_chgcur = 450 pmu_suspend_chgcur = 1500 pmu_shutdown_chgcur = 1500 pmu_init_chgvol = 4200 pmu_ac_vol = 4000 pmu_ac_cur = 0 pmu_usbpc_vol = 4400 pmu_usbpc_cur = 500 pmu_battery_warning_level1 = 15 pmu_battery_warning_level2 = 0 pmu_chgled_func = 0 pmu_chgled_type = 0 power_start = 0 pmu_bat_para1 = 0 pmu_bat_para2 = 0 pmu_bat_para3 = 0 pmu_bat_para4 = 0 pmu_bat_para5 = 0 pmu_bat_para6 = 0 pmu_bat_para7 = 0 pmu_bat_para8 = 0 pmu_bat_para9 = 5 pmu_bat_para10 = 8 pmu_bat_para11 = 9 pmu_bat_para12 = 10 pmu_bat_para13 = 13 pmu_bat_para14 = 16 pmu_bat_para15 = 20 pmu_bat_para16 = 33 pmu_bat_para17 = 41 pmu_bat_para18 = 46 pmu_bat_para19 = 50 pmu_bat_para20 = 53 pmu_bat_para21 = 57 pmu_bat_para22 = 61 pmu_bat_para23 = 67 pmu_bat_para24 = 73 pmu_bat_para25 = 78 pmu_bat_para26 = 84 pmu_bat_para27 = 88 pmu_bat_para28 = 92 pmu_bat_para29 = 93 pmu_bat_para30 = 94 pmu_bat_para31 = 95 pmu_bat_para32 = 100 pmu_bat_temp_enable = 0 pmu_bat_charge_ltf = 2261 pmu_bat_charge_htf = 388 pmu_bat_shutdown_ltf = 3200 pmu_bat_shutdown_htf = 237 pmu_bat_temp_para1 = 7466 pmu_bat_temp_para2 = 4480 pmu_bat_temp_para3 = 3518 pmu_bat_temp_para4 = 2786 pmu_bat_temp_para5 = 2223 pmu_bat_temp_para6 = 1788 pmu_bat_temp_para7 = 1448 pmu_bat_temp_para8 = 969 pmu_bat_temp_para9 = 664 pmu_bat_temp_para10 = 466 pmu_bat_temp_para11 = 393 pmu_bat_temp_para12 = 333 pmu_bat_temp_para13 = 283 pmu_bat_temp_para14 = 242 pmu_bat_temp_para15 = 179 pmu_bat_temp_para16 = 134
3.33.3 [powerkey]
| 配置项 | 配置项含义 |
|---|---|
| compatible | 设备名字 |
| pmu_powkey_off_timet | 系统起来后,长按关机时间 |
| pmu_powkey_off_func | 系统起来后,长按功能 0 :shutdown, 1 :restart |
| pmu_powkey_off_en | 系统起来后,是否使用长按功能 |
| pmu_powkey_long_time | 短按响应时间 |
| pmu_powkey_on_time | 关机后,长按开机时间 |
| pmu_hot_shutdowm | 是否允许pmu高温关机 |
| pmu_inshort | 启动是否检测电池电量 |
示例:
[powerkey0] compatible = "axp221s-powerkey" pmu_powkey_off_time = 6000 pmu_powkey_off_func = 0 pmu_powkey_off_en = 1 pmu_powkey_long_time = 1500 pmu_powkey_on_time = 1000
3.33.4 [regulator].
| 配置项 | 配置项含义 |
|---|---|
| compatible | 设备名 |
| regulator_count | regulator数量 |
| regulator | regulator对应的别名,请勿修改 |
示例:
[regulator0] compatible = "axp221s-regulator" regulator_count = 20 regulator1 = "axp221s_dcdc1 none vcc-hdmi vcc-io vcc-dsi vcc-usb vdd-efuse vcc-hp vcc- audio vcc-emmc vcc-card vcc-pc vcc-pd vcc-3v vcc-tvout vcc-tvin vcc-emmcv vcc-sdcv vcc- sdcvq33 vcc-sdcvd vcc-nand vcc-sdcv-p3 vcc-sdcvq33-p3 vcc-sdcvd-p3" regulator2 = "axp221s_dcdc2 none vdd-cpua" regulator3 = "axp221s_dcdc3 none vdd-sys vdd-gpu" regulator4 = "axp221s_dcdc4 none" regulator5 = "axp221s_dcdc5 none vcc-dram" regulator6 = "axp221s_rtc none vcc-rtc" regulator7 = "axp221s_aldo1 none vcc-25 csi-avdd" regulator8 = "axp221s_aldo2 none vcc-pa ehpy-vdd25" regulator9 = "axp221s_aldo3 none avcc vcc-pll" regulator10 = "axp221s_dldo1 none vcc-io-wifi vcc-pg " regulator11 = "axp221s_dldo2 none vcc-wifi" regulator12 = "axp221s_dldo3 none" regulator13 = "axp221s_dldo4 none vdd-sata-25 vcc-pf" regulator14 = "axp221s_eldo1 none vcc-pe csi-iovcc csi-afvcc" regulator15 = "axp221s_eldo2 none csi-dvdd" regulator16 = "axp221s_eldo3 none vdd-sata-12" regulator17 = "axp221s_ldoio0 none vcc-ctp" regulator18 = "axp221s_ldoio1 none vcc-i2s-18" regulator19 = "axp221s_dc1sw none ephy-dvdd33" regulator20 = "axp221s_dc5ldo none"
3.33.5 [axp_gpio]
| 配置项 | 配置项含义 |
|---|---|
| compatible | 设备名 |
示例:
[axp_gpio0] compatible = "axp221s-gpio"
3.33.6 [psensor_table].
| 配置项 | 配置项含义 |
|---|---|
| psensor_count | psensor数量 |
| prange_min_2 | 范围最小值 2 |
| prange_max_2 | 范围最大值 2 |
| prange_min_1 | 范围最小值 1 |
| prange_max_1 | 范围最大值 1 |
| prange_min_0 | 范围最小值 0 |
| prange_max_0 | 范围最大值 0 |
示例:
psensor_count = 3 prange_min_2 = 4800 prange_max_2 = 6500 prange_min_1 = 4500 prange_max_1 = 4800 prange_min_0 = 0 prange_max_0 = 4500
3.34 DVFS.
3.34.1 [dvfs_table]&&[dvfs_table_[X]]
| 配置项 | 配置项含义 |
|---|---|
| extremity_freq | 极限频率 |
| max_freq | 最大运行频率 |
| min_freq | 最小运行频率 |
| lv_count | VF表项数 |
| lvn_freq | 对应的最大频率(n表示级数) |
| lvn_volt | 第n级的电压 |
示例:
[dvfs_table] max_freq = 1200000000 min_freq = 240000000 lv_count = 8 lv1_freq = 1200000000 lv1_volt = 1300 lv2_freq = 1104000000 lv2_volt = 1240 lv3_freq = 1008000000 lv3_volt = 1160 lv4_freq = 912000000 lv4_volt = 1100 lv5_freq = 720000000 lv5_volt = 1000 lv6_freq = 0 lv6_volt = 1000 lv7_freq = 0 lv7_volt = 1000 lv8_freq = 0 lv8_volt = 1000
! 警告
vf 表 ( 电压频率对应表 ) 关乎系统稳定性,请勿私自修改!
3.35 s_uart.
| 配置项 | 配置项含义 |
|---|---|
| s_uart_used | 是否使用cpus的uart模块;0-否,1-是 |
| s_uart_tx | cpus TX GPIO配置 |
| s_uart_rx | cpus RX GPIO配置 |
示例:
[s_uart0] s_uart_used = 1 s_uart_tx = port:PL02<2> s_uart_rx = port:PL03<2>
3.36 s_twi
| 配置项 | 配置项含义 |
|---|---|
| s_twi0_used | 0-否,1-是 |
| s_twi0_sck | cpus i2c sck GPIO配置 |
| s_twi0_sda | cpus i2c sda GPIO配置 |
示例:
[s_twi0] s_twi0_used = 1 s_twi0_sck = port:PL00<2><1><2> s_twi0_sda = port:PL01<2><1><2>
3.37 s_jtag.
| 配置项 | 配置项含义 |
|---|---|
| s_jtag_used | 0-否,1-是 |
| s_jtag_tms | cpus jtag模式选择输入GPIO配置 |
| s_jtag_tck | cpus jtag时钟选择输入GPIO配置 |
| s_jtag_tdo | cpus jtag数据输出GPIO配置 |
| s_jtag_tdi | cpus jtag数据输入GPIO配置 |
示例:
s_jtag_used = 0 s_jtag_tms = port:PL04<2><1><2> s_jtag_tck = port:PL05<2><1><2> s_jtag_tdo = port:PL06<2><1><2> s_jtag_tdi = port:PL07<2><1><2>
3.38 Virtual device.
3.38.1 [Vdevice].
| 配置项 | 配置项含义 |
|---|---|
| Vdevice_used | 作为pinctrl test的虚拟设备,为 1 使能 |
| Vdevice_0 | 虚拟设备的gpio0脚设置 |
| Vdevice_1 | 虚拟设备的gpio1脚设置 |
S 示例:
[Vdevice] Vdevice_used = 1 Vdevice_0 = port:PB00<4><1><2> Vdevice_1 = port:PB01<4><1><2>
4 设备树介绍
4.1 Device tree介绍
ARM Linux 中,arch/arm/mach-xxx 中充斥着大量描述板级细节的代码,而这些板级细节对于内核来讲,就是垃圾,如板上的 platform 设备、resource、
i2c_board_info、spi_board_info以及各种硬件的platform_data。
内核社区为了改变这个局面,引用了PowerPC等其他体系结构下已经使用的Flattened Device Tree(FDT)。采用Device Tree后,许多硬件的细节可以直接透过它传
递给Linux,而不再需要在kernel中进行大量的冗余编码。
Device Tree是一种描述硬件的数据结构,它表现为一颗由电路板上cpu、总线、设备组成的树,Device Tree由一系列被命名的结点(node)和属性(property)组成,
而结点本身可包含子结点。所谓属性,其实就是成对出现的name和value。在Device Tree中,可描述的信息包括:
CPU的数量和类别
内存基地址和大小
总线
外设
中断控制器
GPIO控制器
Clock控制器
Bootloader会将这棵树传递给内核,内核可以识别这棵树,并根据它展开出Linux内核中的platform_device、i2c_client、spi_device等设备,而这些设备用到的内
存、IRQ等资源,也会通过dtb传递给了内核,内核会将这些资源绑定给展开的相应的设备。
Device tree牵扯的东西还是比较多的,对device tree的理解,可以分为 5 个步骤:
用于描述硬件设备信息的文本格式,如dts/dtsi。
认识DTC工具。
Bootloader怎么把二进制文件写入到指定的内存位置。
内核时如何展开文件,获取硬件设备信息。
设备驱动如何使用。
4.2 Device tree source file
.dts文件是一种ASCII文本格式的Device Tree描述,在ARM Linux中,一个.dts文件对应一个ARM的machine。* ARMv7架构下,dts文件放置在内核的arch/arm/boot/dts/目录。
ARMv8架构下,dts文件放置在内核的arch/arm64/boot/dts/目录。* RISCV架构下,dts文件放置在内核的arch/riscv/boot/dts/目录。
由于一个SoC可能对应多个machine(一个SoC可以对应多个产品和电路板),势必这些.dts 文件需包含许多共同的部分。Linux内核为了简化,把SoC公用的部分
或者多个machine共同的部分一般提炼为.dtsi,类似于C语言的头文件,其他的machine对应的.dts就include这个.dtsi。
设备树是一个包含节点和属性的简单树状结构。属性就是键-值对,而节点可以同时包含属性和子节点。例如,以下就是一个.dts格式的简单树:
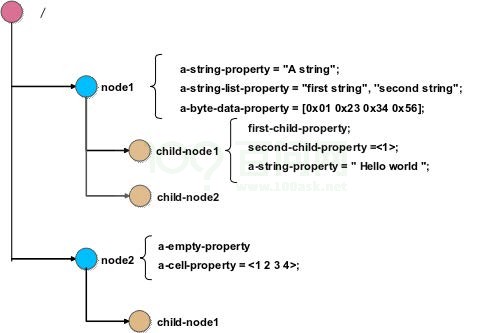
这棵树显然是没什么用的,因为它并没有描述任何东西,但它确实体现了节点的一些属性:
一个单独的根节点:“/”。
两个子节点:“node1”和“node2”。
两个node1的子节点:“child-node1”和“child-node2”。
一堆分散在树里的属性。
属性是简单的键-值对,它的值可以为空或者包含一个任意字节流。虽然数据类型并没有编码进数据结构,但在设备树源文件中仍有几个基本的数据表示形式。
文本字符串(无结束符)可以用双引号表示:a-string-property=”hello world”。
二进制数据用方括号限定。
不同表示形式的数据可以使用逗号连在一起。
逗号也可用于创建字符串列表:a-string-list-property=”first string”,”second string”。
4.2.1 Device tree结构约定.
4.2.1.1 节点名称(node names)
规范:device tree中每个节点的命名必须遵从一下规范:node-name@unit-address
详注:
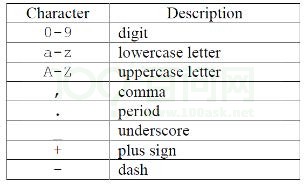
node-name:节点的名称,小于 31 字符长度的字符串,可以包括图中所示字符。节点名称的首字符必须是英文字母,可大写或者小写。通常,节点的命名应该根据它所体现的是什么样的设备。
@unit-address:如果该节点描述的设备有一个地址,则应该加上设备地址(unit-address)。通常,设备地址就是用来访问该设备的主地址,并且该地址也在节点的reg属性中列出。
同级节点命名必须是唯一的,但只要地址不同,多个节点也可以使用一样的通用名称(例如serial@101f1000和serial@101f2000)。
根节点没有node-name或者unit-address,它通过“/”来识别。
实例
在实例中,一个根节点/下有 3 个子节点;节点名称为cpu的节点,通过地址 0 和 1 来区别;节点名称为ethernet的节点,通过地址fe001000和fe002000来区别。
4.2.1.2 路径名称(path names)
在device tree中唯一识别节点的另一个方法,通过给节点指定从根节点到该节点的完整路径。
device tree中约定了完整路径表达方式:
/node-name-1/node-name-2/.../node-name-N
实例:
如图2-3节点名称规范示例,
指定根节点路径:/
指定cpu#1的完整路径:/cpus/cpu@1
指定ethernet#fe002000:/cpus/ethernet@fe002000
说明 注:如果完整的路径可以明确表示我们所需的节点,那么 unit-address 可以省略
4.2.1.3 属性(properties).
Device tree中,节点可以用属性来描述该节点的特征,属性由两个部分组成:名称和值。
属性名称(property names)
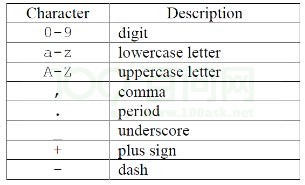
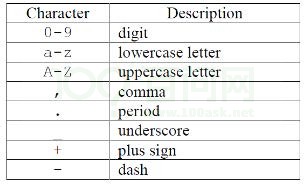
由长度小于 31 的字符串组成。属性名称支持的字符如下图:
非标准的属性名称,需要指定一个唯一的前缀,用来识别是哪个公司或者机构定义了该属性。
例如:
fsl,channel-fifo-len 29 ibm,ppc-interrupt-server#s 30 linux,network-index
属性值(property values)
属性值是一个包含属性相关信息的数组,数组可能有 0 个或者多个字节。
当属性是为了传递真伪信息时,属性值可能为空值,这个时候,属性值的存在或者不存在,就已经足够描述属性的相关信息了。
|value | description | |:---|:---| | |属性表达真伪信息,判断值有没有存在就可以识别 | |大端格式的 32 位整数.例如:值0x11223344,则address11; address+1 22; address+2 33; address+3 44; | |大端格式的 64 位整数,有两个组成。第一表示高位,第二表示地位。例如,0x1122334455667788由两个单元组成<0x11223344,0x55667788> address 11 address+1 22address+2 33 address+3 44 address+4 55 address+566 address+6 77 address+7 88 | |字符串可打印,并且有终结符。例如:“hello” address 68address+1 65 address+2 6c address+3 6c address+46f address+5 00 | |跟特定的属性有关 || 一个值,phandle值提供了一种引用设备树中其他节点的方法。通过定义phandle属性值,任何节点都可以被其他节点引用。value description | |由一系列值串连在一起,例如”hello”,”world”.address 68 address+1 65 address+2 6C address+3 6Caddress+4 6F address+5 00 address+6 77 address+76F address+8 72 address+9 6C address+10 64address+11 00
4.2.1.4 标准属性类型.
Compatible
1.属性:compatible 2.值类型: 3.说明: 树中每个表示一个设备的节点都需要一个compatible属性。 compatible属性是操作系统用来决定使用哪个设备驱动来绑定到一个设备上的关键因素。 compatible是一个字符串列表,之中第一个字符串指定了这个节点所表示的确切的设备,该字符串的格式为: “<制造商>,<型号>” 剩下的字符串的则表示其它与之相兼容的设备。 例如:compatible =“fsl,mpc8641-uart”,“ns16550"; 系统首先会查找跟fsl,mpc8641-uart相匹配的驱动,如果找不到,就找更通用的,跟ns16550相匹配的驱动。
Model
1.属性:model 2.值类型: 3.说明: model属性值是,该值指定了设备的型号。推荐的使用形式如下: “manufacturer,model” 其中,字符manufacturer表示厂商的名称,字符model表示设备的型号。 例如:model =“fsl,MPC8349EMITX”;
Phandle
1.属性:phandle 2.值类型: 3.说明: device tree中,定义了phandle属性,它是一个u32的值。 每个节点都可以拥有一个相关的phandle,通过它的值来唯一标识。(实际实现中常采用指针或者偏移)。 phandle常用于查询或者遍历设备树,也有用于指向设备树中的其它节点。 例如,在设备树中,pic节点如下所示: pic@10000000 { phandle = <1>; interrupt-controller; }; 定义pic节点的phandle为 1 ,那么其他设备节点引用pic节点时,只需要在本节点中添加: interrupt-parent = <1>;
Status
1.属性:status 2.值类型: 3.说明: 该属性指明设备的运行状态,见表格
| value | description |
|---|---|
| “okay” | 表明设备可运行 |
| “disabled” | 表明设备当前不可运行,但条件满足,它还是可以运行的。 |
| “fail” | 表明设备不可运行,设备产生严重错误,如果不修复,将一直不可运行 |
| “fail-sss” | 表明设备不可运行,设备产生严重错误,如果不修复,将一直不可运行.sss部分特定设备相关,指明错误检测条件。 |
#address-cells和#size-cells
1.属性:#address-cells,#size-cells 2.值类型: 3.说明: #address-cells和#size-cells属性常备用在拥有孩子节点的父节点上,用来描述孩子节点时如何编址的。 父结点的#address-cells和#size-cells分别决定了子结点的reg属性的address和length字段的长度。 例如:

root结点的#address-cells = <1>和#size-cells =<1>; 决定了serial、gpio、spi等结点的address和length字段的长度分别为 1 。 cpus结点的#address-cells = <1>和#size-cells = <0>; 决定了 2 个cpu子结点的address为 1 ,而length为空,于是形成了 2 个cpu的reg = <0>和reg = <1>。 external-bus结点的#address-cells = <2>和#size-cells = <1>; 决定了其下的ethernet、i2c、flash的reg字段形如reg = <0 0 0x1000>;reg = <1 0 0x1000>和reg = <2 0 0x4000000>。 其中,address字段长度为 0 ,开始的第 1 个cell( 0 、 1 、 2 )是对应的片选,第 2 个cell( 0 , 0 , 0 )是相对该片选的基地 址, 第 3 个cell(0x1000、0x1000、0x4000000)为length。 特别要留意的是i2c结点中定义的#addresscells= <1>和#size-cells = <0>; 又作用到了I2C总线上连接的RTC,它的address字段为0x58,是设备的I2C地址。
Reg
1.属性:reg 2.值类型: 3.说明 reg属性描述了设备拥有资源的地址信息,其中的每一组address length表明了设备使用的一个地址范围。 address为 1 个或多个 32 位的整型(即cell),而length则为cell的列表或者为空(若#size-cells = 0)。 address和length字段是可变长的,父结点的#address-cells和#size-cells 分别决定了子结点的reg属性的address和length字段的长度。
Virtual-reg
1.属性:virtual-reg 2.值类型: 3.说明:virutal-reg属性指定一个有效的地址映射到物理地址。
Ranges
1.属性:ranges 2.值类型:或者 3.说明: 前边reg属性说明中,我们已经知道如何给设备分配地址,但目前来说这些地址还只是设备节点的本地地址, 我们还没有描述如何将这些地址映射成CPU可使用的地址。 根节点始终描述的是CPU视角的地址空间。根节点的子节点已经使用的是CPU的地址域, 所以它们不需要任何直接映射。例如,serial@101f0000设备就是直接分配的0x101f0000地址。 那些非根节点直接子节点的节点就没有使用CPU地址域。为了得到一个内存映射地址, 设备树必须指定从一个域到另一个域地址转换的方法,而ranges属性就为此而生。 还以图2-5的设备数来分析: ranges = < 0 0 0x10100000 0x10000 // Chipselect 1,Ethernet 1 0 0x10160000 0x10000 // Chipselect 2,i2c controller 2 0 0x30000000 0x1000000 >; // Chipselect 3,NOR Flash ranges是一个地址转换列表。ranges表中的每一项都是一个包含子地址、父地址和在子地址空间中区域大小的元组。 每个字段的值都取决于子节点的#address-cells、父节点的#address-cells和子节点的#size-cells。 以本例中的外部总线来说,子地址是#address-cells是 2 、父地址#address-cells是 1 、区域大小#size-cells 是 1 。 那么三个ranges被翻译为: 从片选 0 开始的偏移量 0 被映射为地址范围:0x10100000..0x1010ffff 从片选 0 开始的偏移量 1 被映射为地址范围:0x10160000..0x1016ffff 从片选 0 开始的偏移量 2 被映射为地址范围:0x30000000..0x10000000另外,如果父地址空间和子地址空间是相同的,那么该节点可以添加一个空的range属性。 一个空的range属性意味着子地址将被1:1映射到父地址空间。
4.2.2 常用节点类型.
所有device tree都必须拥有一个根节点,还必须在根节点下边有以下的节点:
Cpu节点
Memory节点
4.2.2.1 根节点(root node)
设备树都必须有一个根节点,树中其它的节点都是根节点的后代,根节点的完整路径是/。
根节点具有如下属性:
| 属性名称 | 需要使用 | 属性值类型 | 定义 |
|---|---|---|---|
| #address-cells | 需要 | < u32 > | 表示子节点寄存器属性中的地址 |
| #size-cells | 需要 | < u32 > | 表示子节点寄存器属性中的大小 |
| model | 需要 | < string > | 指定一个字符串用来识别不同板子 |
| compatible | 需要 | < stringlist > | 指定平台的兼容列表 |
| Epapr-version | 需要 | < string > | 这个属性必须包含下边字符串“ePAPR-”其中,是平台遵从的PAPR规范版本号,例如:Epapr-version =”ePAPR-1.1” |
4.2.2.2 别名节点(aliases node)
Device tree中采用别名节点来定义设备节点全路径的别名,别名节点必须是根节点的孩子,而且还必须采用aliases的节点名称。
/aliases节点中每个属性定义了一个别名,属性的名字指定了别名,属性值指定了device tree中设备节点的完整路径。例如:
serial0 =“/simple-bus@fe000000/serial@llc500”
指定该路径下serial@llc500设备节点全路径的别名为serial0。当用户想知道的只是“那个设备是serial”时,这样的全路径就会变得很冗长,采用aliases节点指定一个设备节点全路径的别名,好处就在这个时候体现出来了
4.2.2.3 内存节点(memory node)
ePAPR规范中指定了内存节点是device tree中必须的节点。内存节点描绘了系统物理内存的信息,如果系统中有多个内存范围,那么device tree中可能会创建多个内存节点,或者在一个单独的内存节点中通过reg属性指定内存的范围。节点的名称必须是memory。
内存节点属性如下:
|属性名称 |是否使用 |值类型 |定义| |:---|:---|:---|:---| |Device_type |需要 | |属性值必须为”memory” |reg |需要 ||包含任意数量的用来指示地址和地址空间大小的对 |Initial-mapped-area |可选择| | 指定初始映射区的内存地址和地址空间的大小
假设一个 64 位系统具有以下的物理内存块:
RAM:起始地址0x0,长度0x80000000(2GB)
RAM:起始地址0x100000000,长度0x100000000(4GB)
内存节点的定义可以采用以下方式,假设#address-cells =2,#size-cells =2。
方式 1 :
memory@0 { device_type = "memory"; reg = < 0x000000000 0x00000000 0x00000000 0x80000000 0x000000001 0x00000000 0x00000001 0x00000000>; };
方式 2 :
memory@0 { device_type = "memory"; reg = < 0x000000000 0x00000000 0x00000000 0x80000000>; }; memory@100000000 { device_type = "memory"; reg = < 0x000000001 0x00000000 0x00000001 0x00000000>; };
4.2.2.4 chosen节点.
chosen节点并不代表一个真正的设备,只是作为一个为固件和操作系统之间传递数据的地方,比如引导参数。chosen节点里的数据也不代表硬件。通常,chosen节点在.dts源文件中为空,并在启动时填充。它必须是根节点的孩子。节点属性如下:
| 属性名称 | 是否使用 | 值类型 | 定义 |
|---|---|---|---|
| bootargs | 可选择 为用户指定boot参数 | ||
| Stdout-path | 可选择 指定boot控制台输出路径 | ||
| Stdin-path | 可选择 指定boot控制台输入路径 |
例子:
chosen { bootargs = "root=/dev/nfs rw nfsroot=192.168.1.1 console=ttyS0,115200"; };
4.2.2.5 cpus节点
ePAPR规范指定cpus节点是device tree中必须的节点,它并不代表系统中真实设备,可以理解cpus节点仅作为存放子节点cpu的一个容器。节点属性如下:
| 属性名称 | 是否使用 | 值类型 |
|---|---|---|
| #address-cells | 必须 | < u32 > |
| #size-cells | 必须 | < u32 > |
4.2.2.6 cpu节点
Device tree中每一个cpu节点描述一个具体的硬件执行单元。每个cpu节点的compatible属性是一个“,”形式的字符串,并指定了确切的cpu,就像顶层的compatible属性一样。如果系统的cpu拓扑结构很复杂,还必须在binding文档中详细说明。
cpu节点所拥有的属性:
| 属性名称 | 是否使用 | 值类型 | 定义 |
|---|---|---|---|
| Device_type | 必须 | < string> | 属性值必须是“cpu”的字符串 |
| reg | 必须 | < prop-encoded-array> | 定义cpu/thread id |
| Clock-frequency | 必须 | < prop-encodec-array> | 指定cpu的时钟频率 |
| Timebase-frequency | 必须 | < prop-encoded-array> | 指定当前timebase的是时钟频率信息 |
| status | < u32 > | 描述cpu的状态okay/disabled | |
| Enable-method | < stringlist > | 指定了cpu从disabled状态到enabled的方式 | |
| Mmu-type | 可选 | < string > 指定cpu mmu的类型 |
cpu节点实例:
cpus { #address-cells = <1>; #size-cells = <0>; cpu@0 { device_type = "cpu"; compatible = "arm,cortex-a8"; reg = <0x0>; }; };
4.2.2.7 soc节点
这个节点用来表示一个系统级芯片(soc),如果处理器就是一个系统级芯片,那么这个节点就必须包含,soc节点的顶层包含soc上所有设备可见的信息。
节点名字必须包含soc的地址并且以”soc”字符开头。
实例:
soc@01c20000 { compatible = "simple-bus"; #address-cells = <1>; #size-cells = <1>; reg = <0x01c20000 0x300000>; ranges; intc: interrupt-controller@01c20400 { compatible = "allwinner,sun4i-ic"; reg = <0x01c20400 0x400>; interrupt-controller; #interrupt-cells = <1>; }; pio: pinctrl@01c20800 { compatible = "allwinner,sun5i-a13-pinctrl"; reg = <0x01c20800 0x400>; interrupts = <28>; clocks = <&apb0_gates 5>; gpio-controller;interrupt-controller; #address-cells = <1>; #size-cells = <0>; #gpio-cells = <3>; uart1_pins_a: uart1@0 { allwinner,pins = "PE10", "PE11"; allwinner,function = "uart1"; allwinner,drive = <0>; allwinner,pull = <0>; }; }
4.2.3 Binding
对于Device Tree中的结点和属性具体是如何来描述设备的硬件细节的,一般需要文档来进行讲解,这些文档位于内核的Documentation/devicetree/bindings/arm路径下。
4.3 Device tree block file.
4.3.1 DTC (device tree compiler)
将.dts编译为.dtb 的工具。DTC 的源代码位于内核的 scripts/dtc目录,在 Linux内核使能了Device Tree的情况下,编译内核时同时会编译dtc。通过scripts/dtc/Makefile中的“hostprogs-y := dtc”这一hostprogs编译target。
在Linux内核的arch/arm/boot/dts/Makefile中,描述了当某个SoC被选中后,哪些.dtb文件会被编译出来,如与sunxi对应的.dtb包括
dtb-$(CONFIG_ARCH_SUNXI) += sun4i-a10-cubieboard.dtb sun4i-a10-mini-xplus.dtb sun4i-a10-hackberry.dtb sun5i-a10s-olinuxino-micro.dtb sun5i-a13-olinuxino.dtb
4.3.2 Device Tree Blob (.dtb).
.dtb是.dts被DTC编译后的二进制格式的Device Tree描述,可由Linux内核解析。通常在我们为电路板制作NAND、SD启动image时,会为.dtb文件单独留下一个很小的区域以存放之,之后bootloader在引导kernel的过程中,会先读取该.dtb到内存。
4.3.3 DTB的内存布局.
Device tree block内存布局大致如下(地址从上往下递增)。我们可以看到,dtb文件结构主要由 4 个部分组成,一个小的文件头、一个memory reserve map、一个device tree structure、一个device-tree strings。这几个部分构成一个整体,一起加载到内存中。

4.3.3.1 文件头-boot_param_header.
内核的物理指针指向的内存区域在structure boot_param_header这个结构体中大概描述到了:
include/linux/of_fdt.h /* Definitions used by the flattened device tree */ #define OF_DT_HEADER 0xd00dfeed /* marker */ #define OF_DT_BEGIN_NODE 0x1 /* Start of node, full name */ #define OF_DT_END_NODE 0x2 /* End node */ #define OF_DT_PROP 0x3 /* Property: name off, size,* content */ #define OF_DT_NOP 0x4 /* nop */ #define OF_DT_END 0x9 #define OF_DT_VERSION 0x10 struct boot_param_header { __be32 magic; /* magic word OF_DT_HEADER */ __be32 totalsize; /* total size of DT block */ __be32 off_dt_struct; /* offset to structure */ __be32 off_dt_strings; /* offset to strings */ __be32 off_mem_rsvmap; /* offset to memory reserve map */ __be32 version; /* format version */ __be32 last_comp_version; /* last compatible version *//* version 2 fields below */ __be32 boot_cpuid_phys; /* Physical CPU id we're booting on */ /* version 3 fields below */ __be32 dt_strings_size; /* size of the DT strings block */ /* version 17 fields below */ __be32 dt_struct_size; /* size of the DT structure block */ };
具体这个结构体怎么用,在后边会有具体描述。
4.3.3.2 device-tree structure.
这一部分主要存储了各个结点的信息。每一个结点都都可以嵌套子结点,其中的结点以OF_DT_BEGIN_NODE 做起始标志,接下来就是结点名。如果结点带有属性,那么就紧接就是结点的属性,其以OF_DT_PROP为起始标志。嵌套的子结点紧跟着父子结点之后,也是以OF_DT_BEGIN_NODE起始。OF_DT_END_NODE标志着一结点的终止。

上面提到一个结点的属性,每一个属性有如下的结构:
Scripts/dtc/libfdt/fdt.h struct fdt_property { uint32_t tag; uint32_t len; uint32_t nameoff; char data[0]; };
4.3.3.3 Device tree string.
最后一部分就是String,没有固定格式。其主要是把一些公共的字符串线性排布,以节约空间。
4.3.3.4 dtb实例

可以看出dtb结构由 4 个部分组成。
memory reserve table:给出了kernel不能使用的内存区域列表。
Of_device-struct:结构包含了 device tree的属性。每个节点以 OF_DT_BEGIN_NODE标签开始,接着紧跟着节点的名称。如果节点有属性,那么紧跟着就是节点的属性,每个属性值以 OF_DT_PROP 标签开始,紧接着是嵌套在节点中的子节点,子节点也是以OF_DT_BEGIN_NODE起始,以OF_DT_END_NODE结束,最后以标签OF_DT_END标示根节点结束。
对每个属性,在标签 OF_DT_PROP 之后,由一个 32 位的数指明属性名称存放在偏移of_dt_string结构体起始地址多少byte的地方。之所以采用这种做法,是因为有很多节点都有很多相同的属性名称,比如compatible、reg等,这些节点的名称如果一个个存放起来,显然挺浪费空间的,采用一个偏移量,来指定它在of_dt_string的哪个地方,在of_dt_string中只需要保存一份属性值就可以了,有利于降低block占用的空间。
4.4 内核常用API
4.4.1 of_device_is_compatible
原型
int of_device_is_compatible(const struct device_node *device,const char *compat);
函数作用
判断设备结点的compatible属性是否包含compat指定的字符串。当一个驱动支持 2 个或多个设备的时候,这些不同.dts文件中设备的compatible属性都会进入驱动OF匹配表。因此驱动可以透过Bootloader传递给内核的Device Tree中的真正结点的compatible属性以确定究竟是哪一种设备,从而根据不同的设备类型进行不同的处理。
4.4.2 of_find_compatible_node.
原型
struct device_node *of_find_compatible_node(struct device_node *from, const char *type, const char *compatible);
函数作用
根据compatible属性,获得设备结点。遍历Device Tree中所有的设备结点,看看哪个结点的类型、compatible属性与本函数的输入参数匹配,大多数情况下,from、type为NULL。
4.4.3 of_property_read_u32_array
原型
int of_property_read_u8_array(const struct device_node *np, const char *propname, u8 *out_values, size_t sz); int of_property_read_u16_array(const struct device_node *np, const char *propname, u16 *out_values, size_t sz); int of_property_read_u32_array(const struct device_node *np, const char *propname, u32 *out_values, size_t sz); int of_property_read_u64(const struct device_node *np, const char *propname, u64 *out_value);
函数作用
读取设备结点np的属性名为propname,类型为 8 、 16 、 32 、 64 位整型数组的属性。对于 32位处理器来讲,最常用的是of_property_read_u32_array()。
4.4.4 of_property_read_string
原型
int of_property_read_string(struct device_node *np, const char *propname, const char **out_string); int of_property_read_string_index(struct device_node *np, const char *propname, int index, const char **output);
函数作用
前者读取字符串属性,后者读取字符串数组属性中的第index个字符串。
4.4.5 bool of_property_read_bool
原型
static inline bool of_property_read_bool(const struct device_node *np, const char *propname);
函数作用
如果设备结点np含有propname属性,则返回true,否则返回false。一般用于检查空属性是否存在。
4.4.6 of_iomap
原型
void __iomem *of_iomap(struct device_node *node, int index);
函数作用
通过设备结点直接进行设备内存区间的ioremap(),index是内存段的索引。若设备结点的reg属性有多段,可通过index标示要ioremap的是哪一段,只有 1 段的情况,index为 0 。采用Device Tree后,大量的设备驱动通过of_iomap()进行映射,而不再通过传统的ioremap。
4.4.7 irq_of_parse_and_map
原型
unsigned int irq_of_parse_and_map(struct device_node *dev, int index);
函数作用
透过Device Tree或者设备的中断号,实际上是从.dts中的interrupts属性解析出中断号。若设备使用了多个中断,index指定中断的索引号。
4.5 Device tree配置demo
以pinctrl为例:
soc@01c20000 { compatible = "simple-bus"; #address-cells = <1>; #size-cells = <1>; ranges; pio: pinctrl@01c20800 { compatible = "allwinner,sun50i-pinctrl"; reg = <0x01c20800 0x400>; interrupts = <0 11 1>, <0 15 1>, <0 16 1>, <0 17 1>; clocks = <&apb1_gates 5>; gpio-controller; interrupt-controller; #address-cells = <1>; #size-cells = <0>; #gpio-cells = <6>; uart0_pins_a: uart0@0 { allwinner,pins = "PH20", "PH21"; //设备需要用到的pin allwinner,function = "uart0"; //复用名字 allwinner,drive = <0>; //设置驱动力 allwinner,pull = <0>; //设置上下拉 allwinner,data=<0>; //设置数据属性 }; }; };
5 设备树使用
5.1 引言
5.1.1 编写目的
介绍Device Tree配置、设备驱动如何获取Device Tree配置信息等内容,让用户明确掌握Device Tree配置与使用方法。
5.1.2 术语与缩略语.
| 术语/缩略语 | 解释说明 |
|---|---|
| DTS Device | Tree Source File,设备树源码文件 |
| DTB Device | Tree Blob File,设备树二进制文件 |
| sys_config.fex | Allwinner配置文件 |
5.2 模块介绍
Device Tree是一种描述硬件的数据结构,可以把嵌入式系统资源抽象成一颗树形结构,可以直观查看系统资源分布;内核可以识别这棵树,并根据它展开出Linux内核中的platform_device等。
5.2.1 模块功能介绍.
Device Tree改变了原来用hardcode方式将HW配置信息嵌入到内核代码的方法,消除了arch/arm64下大量的冗余编码。使得各个厂商可以更专注于driver开发,开发流程遵从main-line kernel的规范。
5.2.2 相关术语介绍.
| 术语/缩略语 | 解释说明 |
|---|---|
| FDT | 嵌入式PowerPC中,为了适应内核发展&&嵌入式PowerPC平台的千变万化,推出了Standard for EmbeddedPower Architecture Platform Requirements(ePAPR)标准,吸收了Open Firmware的优点,在U-boot引入了扁平设备树FDT接口,使用一个单独的FDT blob对象将系统硬件信息传递给内核。 |
| DTS | device tree源文件,包含用户配置信息。对于32bit Arm架构,dts文件存放在arch/arm/boot/dts路径下。对于64bitArm架构,dts文件存放在arch/arm64/boot/dts路径下。对于Tina3.5.1及之后版本,会使用device目录下的board.dts,即device/config/chips/ chip / conf igs /{borad}/board.dts。 |
| DTB | DTS被DTC编译后二进制格式的Device Tree描述,可由Linux内核解析,并为设备驱动提供硬件配置信息。 |
5.3 如何配置
5.3.1 配置文件位置.
设备树文件,存放在具体内核的目录下。
ARMv7架构下,dts文件放置在内核的arch/arm/boot/dts/目录。
ARMv8架构下,dts文件放置在内核的arch/arm64/boot/dts/目录。
RISCV架构下,dts文件放置在内核的arch/riscv/boot/dts/目录。
对于Tina3.5.1及之后版本,会使用device目录下的board.dts,即:
device/config/chips/${chip}/configs/${borad}/board.dts
lunch选择具体方案后,可以使用快捷命令跳到该目录:
cdts
要确认具体的设备树,首先确定chip,在lunch选择方案之后,会有打印:
TARGET_CHIP=xxx
如,TARGET_CHIP=sun8iw18p1,则使用sun8iw18p1开头的配置文件。
对应CHIP开头的设备树有多份。编译内核的时候都会进行编译,生成中间文件。在打包的时候,才结合sys_config,生成最终的设备树。
在打包脚本,即scripts/pack_img.sh中,do_ini_to_dts函数进行相关的处理。
对于Tina3.5.0及之前版本,如果有方案同名的设备树,则优先使用方案同名的设备树。没有的话,则使用通用的设备树。
如 cowbell-perf1 方案,会先找 sun8iw18p1-cowbell-perf1.dts,如果找不到,就使用sun8iw18p1-soc.dts。
对于Tina3.5.1及之后版本,会使用device目录下的board.dts,即:
device/config/chips/${chip}/configs/${borad}/board.dts
5.3.2 配置文件关系.
5.3.2.1 不存在sys_config.fex配置情况
当不存在sys_config.fex时,一份完整的配置可以包括两个部分(以sun50iw1p1平台为例):
soc级配置文件:定义了SOC级配置,如设备时钟、中断等资源,如图sun50iw1p1.dtsi[1]。
board级配置文件:定义了板级配置,包含一些板级差异信息,如图sun50iw1p1-t1.dtsi。
示例如图:
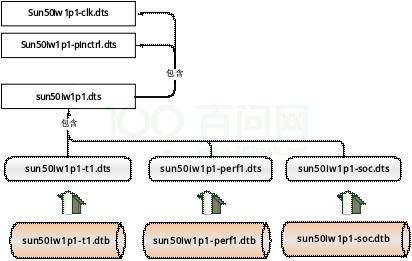
说明 注,对应图中为 sun50iw1p1.dts , .dts 与 .dtsi 的区别在于 dtsi 是 dts 公共部分的提炼,应用时 dts 包含 dtsi 即可。 在本文中并不作严格区分。
上图以R18为例子,展示了三个方案的设备树配置信息,其中:
每个方案 dtb 文件,依赖于 sun50iw1p1- board. dtssun 50 iw 1 p 1 −{board}.dtsi 又包含sun50iw1p1.dtsi,当board级配置文件跟 soc级配置文件出现相同节点的同名属性时,Board级配置文件的属性值会去覆盖soc级的相同属性值。
图示中sun50iw1p1-soc.dts文件跟sun50iw1p1-t1.dts与sun50iw1p1-perf1.dts一样,都属于board配置文件。该配置文件定义为一种通用的board配置文
件,主要为了防止客户移植新的方案时,没有在内核linux-3.10/arch/arm64/boot/dts/目录下定义客户方案的board级配置文件。如果出现这样的情况,内核编译的时候,就会采用sun50iw1p1-soc.dts,作为该客户方案的board级配置文件。注:Tina3.5.1及之后的版本,方案dts配置,迁移到了device/config/chips/ chip / conf igs /{board}/board.dts
5.3.2.2 存在sys_config.fex配置情况
当存在sys_config.fex时,一份完整的配置可以包括三个部分(以sun50iw1p1平台为例):
soc级配置文件:定义了SOC级配置,如设备时钟、中断等资源,如图sun50iw1p1.dtsi。
board级配置文件:定义了板级配置,包含一些板级差异信息,如图sun50iw1p1-t1.dtsi。
sys_config.fex配置文件,为方便客户使用而定义,优先级比board级配置、soc级配置都高。
示例如图:
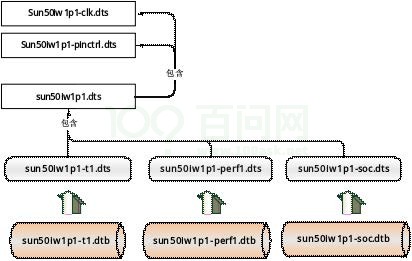
以R18为例子,上图展示了三个方案的设备树配置信息,其中:
每个方案 dtb 文件,既包含 sys_config.fex 配置信息,同时又依赖于 sun50iw1p1- board. dtssun 50 iw 1 p 1 −{board}.dtsi又包含sun50iw1p1.dtsi,sys_config.fex配置文件的
优先级别最高,sys_config.fex跟devicetree文件都存在配置项时,sys_config.fex的配置 项内容会更新到board级配置文件或者soc级配置文件对应的配置项上去。
图示中sun50iw1p1-soc.dts文件跟sun50iw1p1-t1.dts与sun50iw1p1-perf1.dts一样,都属于board配置文件。该配置文件定义为一种通用的board配置文件,主要为了防止客户移植新的方案时,没有在内核 linux-4.4/arch/arm64/boot/dts/sunxi/目录下定义客户方案的board级配置文件。如果出现这样的情况,内核编译的时候,就会采用sun50iw1p1-soc.dts,作为该客户方案的board级配置文件。注:Tina3.5.1及之后的版本,方案dts配置,迁移到了device/config/chips/ chip / conf igs /{board}/board.dts
5.3.2.3 soc级配置文件与board级配置文件.
soc级配置文件与board级配置文件都是dts配置文件,对于相同设备节点的描述可能存在重合关系。因此,需要对重合的部分采取合并或覆盖的特殊处理,我们一般考虑两种情况:
1 、一般地,soc级配置文件保存公共配置,board级配置文件保存差异化配置,如果公共配置不完善或需要变更,则一般需要通过board级配置文件修改补充,那么只需在board级配置文件中创建相同的路径的节点,补充差异配置即可。此时采取的合并规则是:两个配置文件中不同的属性都保留到最终的配置文件,即合并不同属性配置项;相同的属性,则优先选取board级配置文件中属性值保留,即board覆盖soc级相同属性配置项。如下:
soc级定义: /{ soc { thermal-zones { xxx { aaa = "1"; bbb = "2"; } } } } board级定义: /{ soc { thermal-zones { xxx { aaa = "3"; ccc = "4"; } } } } 最终生成: /{ soc { thermal-zones { xxx { aaa = "3";bbb = "2"; ccc = "4"; } } } }
2 、如果soc级保存的公共配置无法满足部分方案的特殊要求,且使用这项公共配置的其他方案众多,直接修改难度较大。那么我们考虑在board级配置文件中,使用/delete-node/语句删除soc级的配置,并重新定义。如下:
soc级定义: /{ soc { thermal-zones { xxx { aaa = "1"; bbb = "2"; } } } } board级定义: /{ soc { /delete-node/ thermal-zones; thermal-zones { xxx { aaa = "3"; ccc = "4"; } } } } 最终生成: /{ soc { thermal-zones { xxx { aaa = "3"; ccc = "4"; } } } }
删除节点的语法如下:
/delete-node/ 节点名;
需要注意的是注意:( 1 )/delete-node/与节点名之间有空格。
( 2 )如果节点中有地址信息,节点名后也需要加上。
删除属性的语法如下:
/delete-property/属性名;
5.3.3 配置sys_config.fex
5.3.4 配置device tree
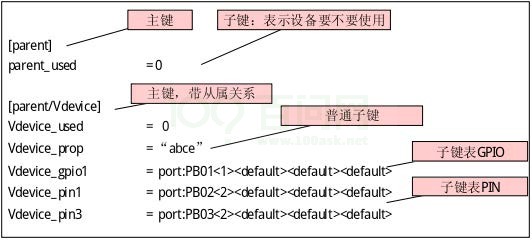
Vdevice: vdevice@0{ (详见(1)):(详见(2)) compatible=”allwinner,sun50i-vdevice”; device_type=”Vdevice”; (详见(3)) pinctrl_name=”default”; (详见(4)) pinctrl_0=<&vdevice_pins_a> test_prop=”adb” (详见(5)) status=”okay” (详见(6)) };
详注:
(1) label,此处名字必须与sys_config.fex主键一致。
(2) 节点名字。
(3) 特定属性表示设备类型,必须与label一致。
(4) 特定属性,用来PIN配置。
(5) 普通属性。
(6) 特定属性,用来表示设备是否使用。
5.4 接口描述
Linux系统为device tree提供了标准的API接口。
5.4.1 常用外部接口.
使用内核提供的device tree接口,必须引用Linux系统提供的device tree接口头文件,包含 且不限于以下头文件:
#include #include #include #include
5.4.1.1 irq_of_parse_and_map
| 类别 | 介绍 |
函数原型 unsigned int irq_of_parse_and_map(struct device_node *dev, int index) 参数 dev:要解析中断号的设备;index:dts源文件中节点 interrupt属性值索引; 返回 如果解析成功,返回中断号,否则返回 0 。
DEMO:
以timer节点为例子: Dts配置: /{ timer0: timer@1c20c00 { ... interrupts = ; ... }; }; 驱动代码片段: static void __init sunxi_timer_init(struct device_node *node){ int irq; .... irq = irq_of_parse_and_map(node, 0); if (irq <= 0) panic("Can't parse IRQ"); }
5.4.1.2 of_iomap
| 类别 | 介绍 |
|---|---|
| 函数原型 | void __iomem *of_iomap(struct device_node *np, intindex); |
| 参数 | np:要映射内存的设备节点,index:dts源文件中节点reg属性值索引; |
| 返回 | 如果映射成功,返回IO memory的虚拟地址,否则返回NULL。 |
DEMO:
以timer节点为例子,dts配置: /{ timer0: timer@1c20c00 { reg = <0x0 0x01c20c00 0x0 0x90>; }; }; 以timer为例子,驱动代码片段: static void __init sunxi_timer_init(struct device_node *node){ timer_base = of_iomap(node, 0); }
5.4.1.3 of_property_read_u32
| 类别 | 介绍 |
|---|---|
| 函数原型 | static inline int of_property_read_u32(const structdevice_node *np, const char propname, u32out_value) |
| 参数 | np:想要获取属性值的节点; propname:属性名称; out_value:属性值 |
| 返回 | 如果取值成功,返回 0 。 |
DEMO:
//以timer节点为例子,dts配置例子: /{ soc_timer0: timer@1c20c00 { clock-frequency = <24000000>; timer-prescale = <16>;}; }; //以timer节点为例子,驱动中获取clock-frequency属性值的例子: int rate=0; if (of_property_read_u32(node, "clock-frequency", &rate)) { pr_err("<%s> must have a clock-frequency propertyn",node->name); return; }
5.4.1.4 of_property_read_string
| 类别 | 介绍 |
|---|---|
| 函数原型 | static inline int of_property_read_string(structdevice_node *np, const char *propname, const char**output) |
| 参数 | np:想要获取属性值的节点;propname:属性名称;output:用来存放返回字符串 |
| 返回 | 如果取值成功,返回 0 |
| 功能描述 | 该函数用于获取节点中属性值。(针对属性值为字符串) |
DEMO:
//例如获取string-prop的属性值,Dts配置: /{ soc@01c20800{ vdevice: vdevice@0{ string_prop = "abcd"; }; }; }; 例示代码: test{ const char *name; err = of_property_read_string(np, "string_prop", &name); if (WARN_ON(err)) return; }
5.4.1.5 of_property_read_string_index
| 类别 | 介绍 |
|---|---|
| 函数原型 | static inline int of_property_read_string_index(structdevice_node *np, const char *propname,int index, constchar **output) |
| 参数 | np:想要获取属性值的节点Propname:属性名称; Index:用来索引配置在dts中属性为propname的值。Output:用来存放返回字符串 |
| 返回 | 如果取值成功,返回 0 。 |
| 功能描述 | 该函数用于获取节点中属性值。(针对属性值为字符串)。 |
DEMO:
//例如获取string-prop的属性值,Dts配置: /{ soc@01c20800{ vdevice: vdevice@0{ string_prop = "abcd"; }; }; }; 例示代码: test{ const char *name; err = of_property_read_string_index(np, "string_prop", 0, &name); if (WARN_ON(err)) return; }
5.4.1.6 of_find_node_by_name
| 类别 | 介绍 |
|---|---|
| 函数原型 | extern struct device_node *of_find_node_by_name(struct device_node *from, constchar *name); |
| 参数 | clk:待操作的时钟句柄;From:从哪个节点开始找起 Name:想要查找节点的名字 |
| 返回 | 如果成功,返回节点结构体,失败返回null。 |
| 功能描述 | 该函数用于获取指定名称的节点。 |
DEMO:
//获取名字为vdeivce的节点,dts配置 /{ soc@01c20800{ vdevice: vdevice@0{ string_prop = "abcd"; }; }; }; 例示代码片段: test{ struct device_node *node; node = of_find_node_by_name(NULL, "vdevice"); if (!node){ pr_warn("can not get node.n"); }; of_node_put(node); }
5.4.1.7 of_find_node_by_type.
| 类别 | 介绍 |
|---|---|
| 函数原型 | extern struct device_node *of_find_node_by_name(struct device_node *from, const char *type); |
| 参数 | clk:待操作的时钟句柄;From:从哪个节点开始找起type:想要查找节点中device_type包含的字符串 |
| 返回 | 如果成功,返回节点结构体,失败返回null。 |
| 功能描述 | 该函数用于获取指定device_type的节点。 |
DEMO:
//获取名字为vdeivce的节点,dts配置。 /{ soc@01c20800{ vdevice: vdevice@0{ ... device_type = "vdevice"; string_prop = "abcd"; }; }; }; 例示代码片段: test{ struct device_node *node; .... node = of_find_node_by_type(NULL, "vdevice");if (!node){ pr_warn("can not get node.n"); }; of_node_put(node); }
5.4.1.8 of_find_node_by_path.
| 类别 | 介绍 |
|---|---|
| 函数原型 | extern struct device_node *of_find_node_by_path(const char *path); |
| 参数 | path:通过指定路径查找节点; |
| 返回 | 如果成功,返回节点结构体,失败返回null。 |
| 功能描述 | 该函数用于获取指定路径的节点。 |
DEMO:
//获取名字为vdeivce的节点,dts配置。 /{ soc@01c20800{ vdevice: vdevice@0{ device_type = "vdevice"; string_prop = "abcd"; }; }; }; 例示代码片段: test{ struct device_node *node; node = of_find_node_by_path("/soc@01c2000/vdevice@0"); if (!node){ pr_warn("can not get node.n"); }; of_node_put(node); }
5.4.1.9 of_get_named_gpio_flags
| 类别 | 介绍 |
|---|---|
| 函数原型 | int of_get_named_gpio_flags(struct device_node *np, const char propname, int index, enum of_gpio_flags flags) |
| 参数 | np:包含所需要查找GPIO的节点propname:包含GPIO信息的属性Index:属性propname中属性值的索引Flags:用来存放gpio的flags |
| 返回 | 如果成功,返回gpio编号,flags存放gpio配置信息,失败返回null。 |
| 功能描述 | 该函数用于获取指定名称的gpio信息。 |
DEMO:
//获取名字为vdeivce的节点,dts配置。 /{ soc@01c20800{ vdevice: vdevice@0{ ... device_type = "vdevice"; string_prop = "abcd"; }; }; }; 例示代码片段: test{ struct device_node *node; .... node = of_find_node_by_path("/soc@01c2000/vdevice@0"); if (!node){ pr_warn("can not get node.n"); }; of_node_put(node); } /{ soc@01c20800{ vdevice: vdevice@0{ ... test-gpios=<&pio PA 1 1 1 1 0>; }; }; }; static int gpio_test(struct platform_device *pdev) { struct gpio_config config; .... node=of_find_node_by_type(NULL, "vdevice"); if(!node){ printk(" can not find noden"); } ret = of_get_named_gpio_flags(node, "test-gpios", 0, (enum of_gpio_flags *)&config) ; if (!gpio_is_valid(ret)) { return -EINVAL; } };
5.4.2 sys_config接口&&dts接口映射
5.4.2.1 获取子键内容.
| script API: | |
|---|---|
| 原型 | script_item_value_type_e script_get_item(char *main_key, char *sub_key, script_item_u *item); |
作用 |通过主键名和子键名字,获取子键内容(该接口可以自己识别子键的类型)。|
| dts API: | |
|---|---|
| 说明 | dts标准接口支持通过节点和属性名,获取属性值(用户需要知道属性值得类型) |
| 原型 | int of_property_read_u32(const struct device_node *np,const char *propname, u32 *out_value) |
| 作用 | 获取属性值,使用于属性值为整型数据。 |
| 原型 | int of_property_read_string(struct device_node *np,const char *propname, const char **out_string) |
| 作用 | 获取属性值,使用于属性值为字符串。 |
| 原型 | int of_get_named_gpio_flags(struct device_node *np,const char list_name, int index, enum of_gpio_flagsflags) |
| 作用 | 获取GPIO信息。 |
5.4.2.2 获取主键下GPIO列表
| script API: | |
|---|---|
| 原型 | int script_get_pio_list(char *main_key, script_item_u **list); |
| 作用 | 获取主键下GPIO列表。 |
| dts API: | |
|---|---|
| 说明无对应接口。 |
5.4.2.3 获取主键数量.
|script API:|| |:---|:---| |原型| unsigned int script_get_main_key_count(void);、 |作用 |获取主键数量。|
| dts API: | |
|---|---|
| 说明无对应接口。 |
5.4.2.4 获取主键名称.
| script API: | |
|---|---|
| 原型 | char *script_get_main_key_name(unsigned int main_key_index); |
| 作用 | 通过主键索引号,获取主键名字。 |
| dts API: | |
|---|---|
| 说明无对应接口。 |
5.4.2.5 判断主键是否存在
| script API: | |
|---|---|
| 原型 | bool script_is_main_key_exist(char *main_key); |
| 作用 | 判断主键是否存在。 |
dts API: |:---|:---| |说明| dts标准接口支持四种方式判断节点是否存在。 |原型| struct device_node *of_find_node_by_name(struct device_node *from, const char *name)、 |作用 |通过节点名字。| |原型 |struct device_node *of_find_node_by_path(const char *path)| |作用 |通过节点路径。| |原型 |struct device_node *of_find_node_by_phandle(phandle handle)| |作用 |通过节点phandle属性。| |原型 |struct device_node *of_find_node_by_type(struct device_node *from, const char *type)| |作用 |通过节点device_type属性。|
5.5 接口使用例子.
5.5.1 配置比较
下表展示了设备vdevice在sys_config.fex与dts中的配置,两种配置形式不一样,但实现的功能是等价的。
dts:
/* device config in dts: /{ soc@01c20000{ vdevice@0{ compatible = "allwinner,sun50i-vdevice"; device_type= "vdevice"; vdevice_0=<&pio 1 1 1 1 1 0>; vdevice_1=<&pio 1 2 1 1 1 0>; vdevice-prop-1=<0x1234>; vdevice-prop-3="device-string"; status = "okay"; }; }; };
sys_config.fex:
device config in sys_config.fex [vdevice] compatible = "allwinner,sun50i-vdevice"; vdevice_used = 1 vdevice_0 = port:PB01<1><1><2> vdevice_1 = port:PB02<1><1><2> vdevice-prop-1 = 0x1234vdevice-prop-3 = "device-string" */
说明:GPIO_IN/GPIO_OUT/EINT采用下边的配置方式,PIN采用另外配置,参考pinctrl使用说明文档。
vdevice_0=<&pio 1 1 1 1 1 0>; | | | | | | | |-------------------电平 | | | | | | |----------------------上下拉 | | | | | |-------------------------驱动力 | | | | |----------------------------复用类型,0-GPIOIN 1-GPIOOUT.. | | | |------------------------------pin bank内偏移. | | |---------------------------------哪个bank,PA=0,PB=1...以此类推 | |--------------------------------------指向哪个pio,属于cpus要用&r_pio |-----------------------------------------------------属性名字,相当sys_config子键名
5.5.2 获取整形属性值
通过script接口:
#include int get_subkey_value_int(void) { script_item_u script_val; script_item_value_type_e type; type = script_get_item("vdevice", "vdevice-prop-1", &script_val); if (SCIRPT_ITEM_VALUE_TYPE_INT != type) { return -EINVAL; } return 0; }
通过dts接口:
#include int get_subkey_value_int(void) { int ret; u32 value; struct device_node *node; node = of_find_node_by_type(NULL,"vdevice"); if(!node){ return -EINVAL; } ret = of_property_read_u32(node, "vdevice-prop-1", &value); if(ret){ return -EINVAL; } printk("prop-value=%xn", value); return 0;}
5.5.3 获取字符型属性值
通过script接口:
#include int get_subkey_value_string(void) { script_item_u script_val; script_item_value_type_e type; type = script_get_item("vdevice", "vdevice-prop-3", &script_val); if (SCIRPT_ITEM_VALUE_TYPE_STR!= type) { return -EINVAL; } return 0; }
通过dts接口:
#include int get_subkey_value_string(void) { int ret; const char *string; struct device_node *node; node = of_find_node_by_type(NULL,"vdevice"); if(!node){ return -EINVAL; } ret = of_property_read_string(node, "vdevice-prop-3", &string); if(ret){ return -EINVAL; } printk("prop-vlalue=%sn", string); return 0; }
5.5.4 获取gpio属性值
通过script接口:
#include int get_gpio_info(void) { script_item_u script_val;script_item_value_type_e type; type = script_get_item("vdevice", "vdevice_0", &script_val); if (SCIRPT_ITEM_VALUE_TYPE_PIO!= type) { return -EINVAL; } return 0; }
通过dts接口:
#include #include #include int get_gpio_info(void) { unsigned int gpio; struct gpio_config config; struct device_node *node; node = of_find_node_by_name(NULL,"vdevice"); if(!node){ return -EINVAL; } gpio = of_get_named_gpio_flags(node, "vdevice_0", 0, (enum of_gpio_flags *)&config); if (!gpio_is_valid(gpio)) { return -EINVAL; } printk("pin=%d mul-sel=%d drive=%d pull=%d data=%d gpio=%dn", config.gpio, config.mul_sel, config.drv_level, config.pull, config.data, gpio); return 0; }
5.5.5 获取节点
通过scritp接口:
#include int check_mainkey_exist(void) { int ret; ret = script_is_main_key_exist("vdevice"); if(!ret){ return -EINVAL; } }
通过dts接口:
int check_mainkey_exist(void) { struct device_node *node_1, *node_2; /* mode 1*/ node_1 = of_find_node_by_name(NULL,"vdevice"); if(!node_1){ printk("can not find node in dtsn"); return -EINVAL; } /*mode 2 */ node_2 = of_find_node_by_type(NULL,"vdevice"); If(!node_2){ return -EINVAL; } return 0; }
5.6 其他
5.6.1 sysfs设备节点.
device tree会解析dtb文件中,并在/sys/devices目录下会生成对应设备节点,其节点命名规则如下:
5.6.1.1 “单元地址.节点名”
节点名的结构是“单元地址.节点名”,例如1c28000.uart、1f01400.prcm。
形成这种节点名的设备,在device tree里的节点配置具有reg属性。
uart0: uart@01c28000 { compatible = "allwinner,sun50i-uart"; reg = <0x0 0x01c28000 0x0 0x400>; }; prcm { compatible = "allwinner,prcm"; reg = <0x0 0x01f01400 0x0 0x400>; };
5.6.1.2 “节点名.编号”
节点名的结构是“节点名.编号”,例如soc.0、usbc0.5。
形成这种节点名的设备,在device tree里的节点配置没有reg属性。
soc: soc@01c00000 { compatible = "simple-bus"; ...... }; usbc0:usbc0@0 { compatible = "allwinner,sunxi-otg-manager"; ...... };
编号是按照在device tree中的出现顺序从 0 开始编号,每扫描到这样一个节点,编号就增加1 ,如soc节点是第 1 个出现的,所以编号是 0 ,而usbc0是第 6 个出现的,所以编号是 5 。
device tree之所以这么做,是因为device tree中允许配置同名节点,所以需要通过单元地址或者编号来区分这些同名节点。可以参见内核的具体实现代码:
arm64_device_init() ->of_platform_populate() ->of_platform_bus_create() ->of_platform_device_create_pdata() ->of_device_alloc() ->of_device_make_bus_id() of_device_make_bus_id() { ...... reg = of_get_property(node, "reg", NULL); if (reg) { ...... dev_set_name(dev, "%llx.%s", (unsigned long long)addr, node->name); return; } magic = atomic_add_return(1, &bus_no_reg_magic); dev_set_name(dev, "%s.%d", node->name, magic - 1); }
6 设备树调试
介绍在不同阶段Device Tree配置信息查看方式。
6.1 测试环境
Kernel Menuconfig配置:
Device Drivers--> Device Tree and Open Firmware support--> Suppot for device tree in /proc
6.2 Build阶段.
6.2.1 输出文件描述.
用户在tina根目录下执行make命令,执行编译固件的动作,该动作会生成device tree的二进制文件。
这些文件会存放到:
out/<方案名字>/compile_dir/target/linux-<方案名字>/<内核版本>/arch/arm/boot/dts
以sitar方案为例:
(R6平台) 1.sun3iw1p1-sitar-soc.dtb 2.sun3iw1p1-sitar-pd4.dtb 3.sun3iw1p1-sitar-mic.dtb 3.sun3iiw1p1-sitar-cuckoo.dtb
这些文件存放在:out/ sitar-{board} /compile_dir/target/linux-sitar-{board} /linux-3.10.65+/arch/arm/boot/dts路径下边
这个阶段的 dtb 文件只包含 linux-3.10.65+/arch/arm/boot/dts 的配置信息,不包括sys_config.fex配置信息。
6.2.2 配置信息查看.
查看dtb配置信息的方法(在tina根目录下输入):
以R6平台为例:
./lichee/linux-3.10/scripts/dtc/dtc -I dtb -O dts -o output_sunxi.dts ./out/sitar -{board} /compile_dir/target/linux-sitar –{board} /linux-3.10.65+/arch/arm/boot /dts /sun3iw1p1-soc.dtb
解析出来的output_sunxi.dts文件包含的信息,跟lichee/linux-3.10/arch/arm/boot/dts的配置信息完全一致。
6.3 Pack阶段
6.3.1 输出文件描述.
用户在tina根目录下执行pack命令,执行打包生成固件的动作,该动作会生成dtb文件:
以R6平台为例:
sunxi.dtb存放在out/sitar-{board}/image。
这个阶段 sunxi.dtb 文件包含 lichee/linux-3.10/arch/arm/boot/dts/的配置信息,还包含 sys_config.fex配置信息。
6.3.2 配置信息查看.
查看dtb配置信息的方法:
可以通过反编译,从最终的dts生成dtb。
以R6平台为例:
./lichee/linux-3.10/scripts/dtc/dtc -I dtb -O dts -o output.dts ./out/sitar-${board} /image /sunxi.dtb
解析出来的output.dts文件包含的信息,跟lichee/linux-3.10/arch/arm/boot/dts/的配置信 息不完全一致,因为有些配置会被sys_config.fex更新。
默认pack的时候,会反编译一份,输出到:
out/方案/image/.sunxi.dtb
6.4 系统启动boot阶段
当firmware下载到target device之后,target device启动到uboot的时候,也可以查看dtb配置信息。
在uboot的控制台输入:
fdt --help
可以看到uboot提供的可以查看、修改dtb的方法:
fdt - flattened device tree utility commands Usage: fdt addr [-c] [] - Set the [control] fdt location to fdt move - Copy the fdt to and make it active fdt resize - Resize fdt to size + padding to 4k addr fdt print [] - Recursive print starting at fdt list [] - Print one level starting at fdt get value - Get and store in fdt get name - Get name of node and store in fdt get addr - Get start address of and store in fdt get size [] - Get size of [] or num nodes and store in < var> fdt set [] - Set [to ] fdt mknode - Create a new node after fdt rm [] - Delete the node or fdt header - Display header info fdt bootcpu - Set boot cpuid fdt memory - Add/Update memory node fdt rsvmem print - Show current mem reserves fdt rsvmem add - Add a mem reserve fdt rsvmem delete - Delete a mem reserves fdt chosen [] - Add/update the /chosen branch in the tree / - initrd start/end addr fdt save - write fdt to flash
常用的比如:
fdt print --打印整棵设备树。 fdt printf /soc/vdevice --打印“/soc/vdevice”路径下的配置信息。 fdt set /soc/vdevice status "disabled" --设置“/soc/vdevice”下status属性的属性值。 fdt save --fdt set之后需要执行fdt save才能真正写入flash保存。
6.5 系统启动kernel阶段.
内核配置了CONFIG_PROC_DEVICETREE = y之后,在/proc/device-tree文件夹下的文件节点可以读取到dtb的配置信息。
说明 注:该文件节点下配置信息只能读不能写。
7 分区表
请参考,TinaLinux存储管理开发指南。
8 env
8.1 配置文件路径.
env.cfg 根据使用内核版本(linux3.4 或 linux3.10 或 linux4.4)分为 env-3.4.cfg,env-3.10.cfg,env-4.4.cfg,用于环境变量。
Tina下的配置文件可能有几个路径。
Tina 3.5.0及之前版本:
Tina默认配置文件路径:
target/allwinner/generic/configs
芯片默认配置文件路径:
target/allwinner/xxx-common/configs
具体方案配置文件路径:
target/allwinner/xxx-xxx/configs
Tina 3.5.1及之后版本:
芯片默认配置文件路径:
device/config/chips/${chip}/configs/default
具体方案配置文件路径:
device/config/chips/${chip}/configs/${borad}/linux
优先级依次递增,即优先使用具体方案下的配置文件,没有方案配置,则使用芯片默认配置文件,没有方案配置和芯片配置,才使用tina默认配置文件。
8.2 常用配置项说明
| 配置项 | 含义 |
|---|---|
| bootdelay | 串口选择是否进入uboot命令行的等待时间,单位秒。例如:为 0 时自动加载内核,为 3 则等待 3 秒,期间按任何按键都可进入uboot命令行。 |
| bootcmd | 默认为run setargs_nand boot_normal,但uboot会根据实际介质正确修改setargs_nand,称为"update_bootcmd"。另外,在烧录固件时bootcmd会被修改成runsunxi_sprite_test,即此时不会去加载内核,而是去执行烧录固件命令。 |
| setargs_xxx | 会去设置bootargs、console、root、init、loglevel、partitions,这些都是内核需要用到的环境变量。其中partitions会根据分区进行自适应。 |
| boot_normal | 正常启动加载内核。 |
| boot_recovery | 正常启动加载恢复系统。 |
| boot_fastboot | 正常启动加载fastboot。 |
| console | 设置内核的串口。 |
| loglevel | 设置内核的log级别。 |
| verify | 设置是否校验内核,默认会进行校验,设置为=no则不校验。 |
| cmd | 设置cmd内存大小。 |
8.3 uboot中的修改方式.
进入uboot命令行执行env相关命令可以查看,修改,保存env环境变量。常用的命令如:
env print --打印所有环境变量。 env set bootdelay 1 --设置bootdelay为 1 。 env save --保存环境变量,env set之后需要执行env save才能真正写入flash保存。
8.4 用户空间的修改方式.
Tina中提供了uboot-envtools软件包,选中即可:
make menuconfig ---> Utilities ---> <*>uboot-envtools
可在用户空间,调用fw_setenv和fw_printenv,对env进行读写。
fw_printenv使用方法:
Usage: fw_printenv [OPTIONS]... [VARIABLE]... Print variables from U-Boot environment -h, --help print this help.-v, --version display version -c, --config configuration file, default:/etc/fw_env.config -n, --noheader do not repeat variable name in output -l, --lock lock node, default:/var/lock
fw_setenv使用方法:
fw_setenv: option requires an argument -- 'h' Usage: fw_setenv [OPTIONS]... [VARIABLE]... Modify variables in U-Boot environment -h, --help print this help. -v, --version display version -c, --config configuration file, default:/etc/fw_env.config -l, --lock lock node, default:/var/lock -s, --script batch mode to minimize writes Examples: fw_setenv foo bar set variable foo equal bar fw_setenv foo clear variable foo fw_setenv --script file run batch script Script Syntax: key [space] value lines starting with '#' are treated as comment A variable without value will be deleted. Any number of spaces are allowed between key and value. Space inside of the value is treated as part of the value itself. Script Example: netdev eth0 kernel_addr 400000 foo empty empty empty empty empty empty bar
9 nor/nand介质配置
由于spinor一般容量远小于其他介质,为此分离出了独立的分区表sys_partition_nor.fex。打包时需要特殊处理,跟其他介质不兼容。即,可以用一个固件,兼容nand和emmc,但不能兼容spinor。
一般需要跟spinor互换的,是spinand。
配置的目的是:
设置sys_config.fex,方便打包时进行判断
选上适配的驱动,即nor要选nor的驱动,nand要选nand的驱动
选上UDISK使用的文件系统支持,nor默认使用jffs2,nand默认使用ext4
选上对应的文件系统工具,nor需要mtd-utils,nand需要e2fsprogs
具体配置方法如下。
9.1 spinand切换为spinor.
9.1.1 sys_config.
设置介质为nor:
[target] storage_type = 3
配置所用nor的大小,如16M:
[norflash] size = 16
9.1.2 内核配置
make kernel_menuconfig ---> Device Drivers ---> < >Block devices (取消选中) Device Drivers ---> <*>Memory Technology Device (MTD) support <*>OpenFirmware partitioning information support <*>SUNXI partitioning support <*> Caching block device access to MTD devices <*> SPI-NOR device support (对于linux4.9,先选这个,下面的选项才出现) Self-contained MTD device drivers ---> <*> Support most SPI Flash chips (AT26DF, M25P, W25X, ...) File systems ---> < > The Extended 4 (ext4) filesystem(取消选中) File systems ---> [*] Miscellaneous filesystems ---> <*> Journalling Flash File System v2 (JFFS2) support(选中) [*] Enable the block layer ---> [ ] Support for large (2TB+) block devices and files(取消选中)
9.1.3 menuconfig配置
make menuconfig ---> Utilities ---> <*> mtd-utils (选择) ---> <*> mtd-utils-mkfs.jffs2 make menuconfig ---> Utilities ---> Filesystem ---> < > e2fsprogs(取消选择)
9.2 spinor切换为spinand.
9.2.1 sys_config.
设置介质为spinand:
[target] storage_type = 5
9.2.2 内核配置
make kernel_menuconfig ---> Device Drivers ---> [*]Block devices ---> <*> sunxi nand flash driver make kernel_menuconfig ---> Device Drivers ---> < >Memory Technology Device (MTD) support(取消选择) make kernel_menuconfig ---> [*] Enable the block layer ---> [*] Support for large (2TB+) block devices and files make kernel_menuconfig ---> File systems ---> <*> The Extended 4 (ext4) filesystem
9.2.3 menuconfig配置
make menuconfig ---> Utilities ---> < > mtd-utils (取消选择) make menuconfig ---> Utilities ---> Filesystem ---> <*> e2fsprogs
审核编辑:汤梓红
-
内核
+关注
关注
3文章
1372浏览量
40294 -
Linux
+关注
关注
87文章
11306浏览量
209566 -
GPIO
+关注
关注
16文章
1204浏览量
52115
发布评论请先 登录
相关推荐

Tina_Linux系统裁剪开发指南
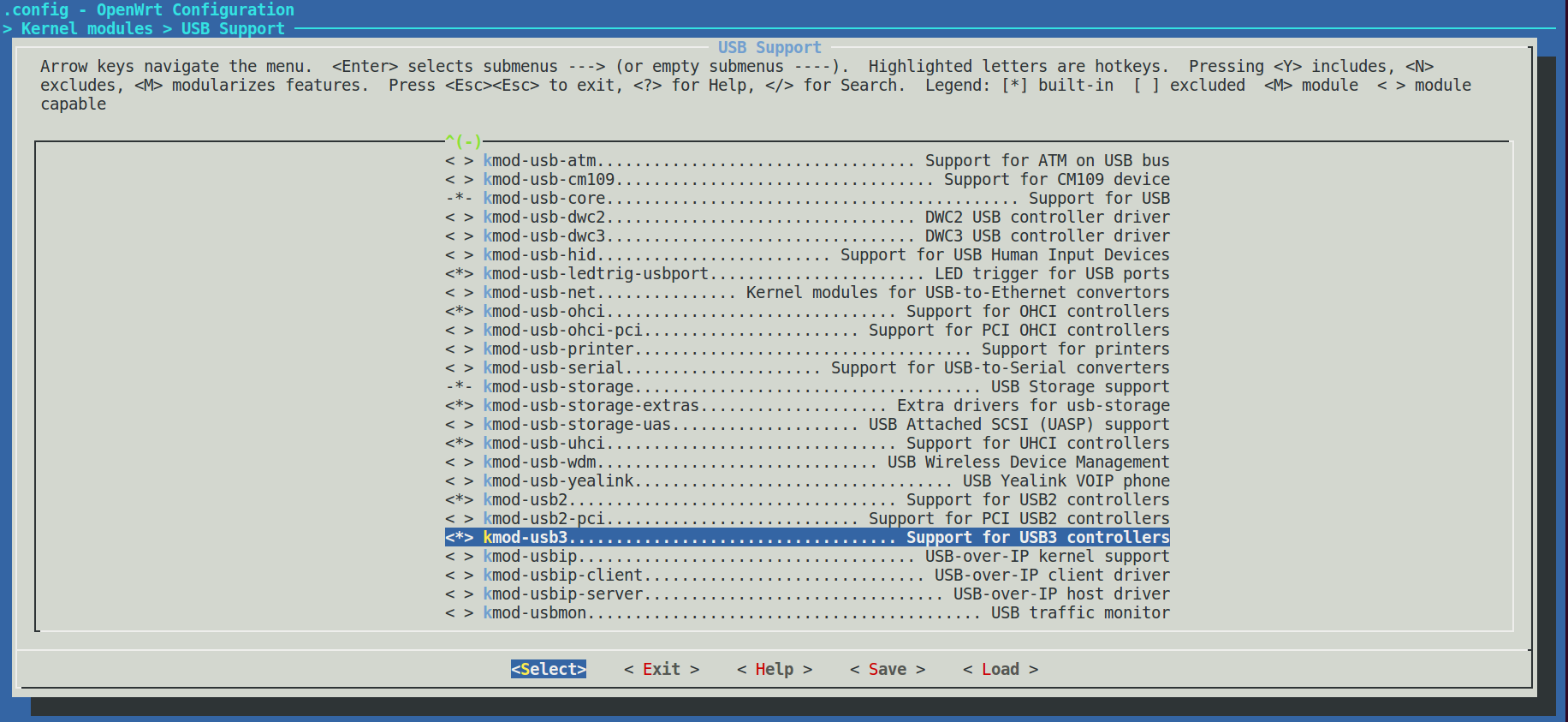
Rockchip Linux SDK uboot logo开发指南


《嵌入式 - STM32开发指南》手把手教你搭建STM32开发环境 [Linux版 - 3]
![《嵌入式 - STM32<b class='flag-5'>开发指南</b>》手把手教你搭建STM32<b class='flag-5'>开发</b>环境 [<b class='flag-5'>Linux</b>版 - 3]](https://file.elecfans.com/web1/M00/D9/4E/pIYBAF_1ac2Ac0EEAABDkS1IP1s689.png)

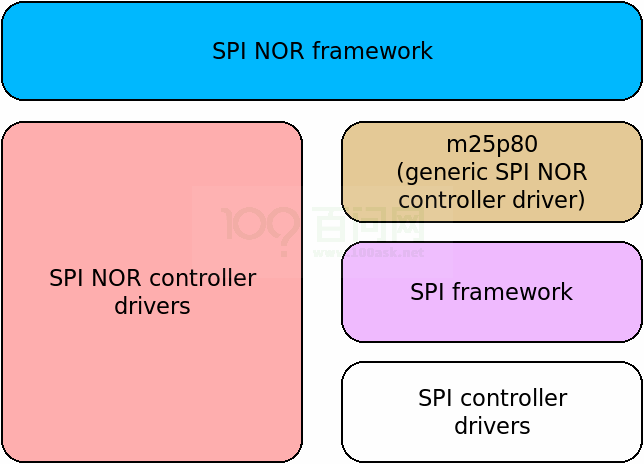
Tina Linux图形系统开发指南
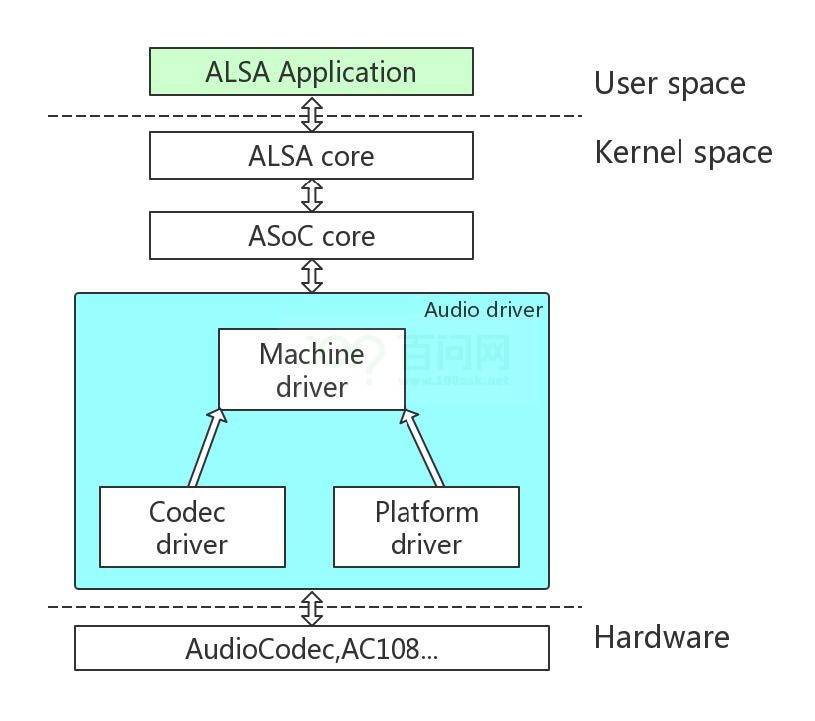





 工商网监
工商网监
评论