 用C语言实现一个全连接层和激活函数ReLU
用C语言实现一个全连接层和激活函数ReLU
在上一篇文章中,我们用C语言实现了一个卷积层,并查看了结果。在本文中,我们将实现其余未实现的层:全连接层、池化层和激活函数 ReLU。
每一层的实现
全连接层
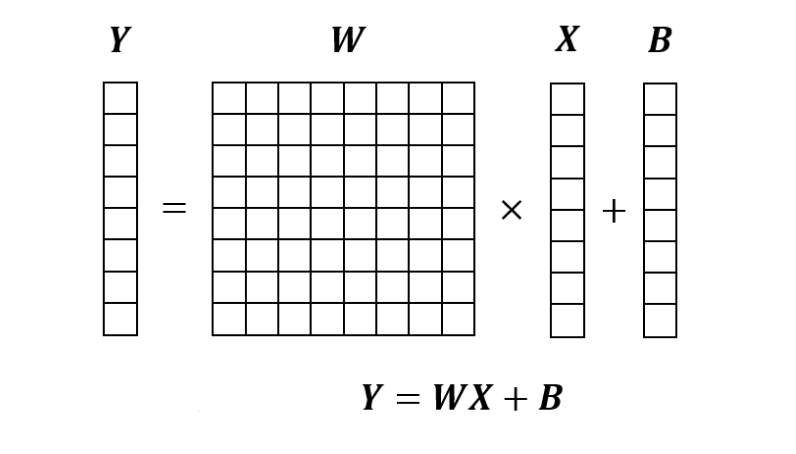
全连接层是将输入向量X乘以权重矩阵W,然后加上偏置B的过程。下面转载第二篇的图,能按照这个图计算就可以了。
全连接层的实现如下。
voidlinear(constfloat*x,constfloat*weight,constfloat*bias, int64_tin_features,int64_tout_features,float*y){ for(int64_ti=0;i< out_features; ++i) { float sum = 0.f; for (int64_t j = 0; j < in_features; ++j) { sum += x[j] * weight[i * in_features + j]; } y[i] = sum + bias[i]; } }
该函数的接口和各个数据的内存布局如下。
考虑稍后设置 PyTorch 参数,内存布局与 PyTorch 对齐。
输入
x: 输入图像。shape=(in_features)
weight: 权重因子。shape=(out_features, in_features)
bias: 偏置值。shape=(out_features)
输出
y: 输出图像。shape=(out_features)
参数
in_features: 输入顺序
out_features: 输出顺序
在全连接层中,内部操作数最多为out_channels * in_channels一个,对于典型参数,操作数远低于卷积层。
另一方面,关注权重因子,卷积层为shape=(out_channels, in_channels, ksize, ksize),而全连接层为shape=(out_features, in_features)。
例如,如果层从卷积层变为全连接层,in_features = channels * width * height则以下关系成立。width, height >> ksize考虑到这一点,在很多情况下,全连接层参数的内存需求大大超过了卷积层。
由于FPGA内部有丰富的SRAM缓冲区,因此擅长处理内存访问量大和内存数据相对于计算总量的大量复用。
单个全连接层不会复用权重数据,但是在视频处理等连续处理中,这是一个优势,因为要进行多次全连接。
另一方面,本文标题中也提到的边缘环境使用小型FPGA,因此可能会出现SRAM容量不足而需要访问外部DRAM的情况。
如果你有足够的内存带宽,你可以按原样访问它,但如果你没有足够的内存带宽,你可以在参数调整和训练后对模型应用称为剪枝和量化的操作。
池化层
池化层是对输入图像进行缩小的过程,这次使用的方法叫做2×2 MaxPooling。在这个过程中,取输入图像2x2区域的最大值作为输出图像一个像素的值。这个看第二张图也很容易理解,所以我再贴一遍。
即使在池化层,输入图像有多个通道,但池化过程本身是针对每个通道独立执行的。因此,输入图像中的通道数和输出图像中的通道数在池化层中始终相等。
池化层的实现如下所示:
voidmaxpool2d(constfloat*x,int32_twidth,int32_theight,int32_tchannels,int32_tstride,float*y){
for(intch=0;ch< channels; ++ch) {
for (int32_t h = 0; h < height; h += stride) {
for (int32_t w = 0; w < width; w += stride) {
float maxval = -FLT_MAX;
for (int bh = 0; bh < stride; ++bh) {
for (int bw = 0; bw < stride; ++bw) {
maxval = std::max(maxval, x[(ch * height + h + bh) * width + w + bw]);
}
}
y[(ch * (height / stride) + (h / stride)) * (width / stride) + w / stride] = maxval;
}
}
}
}
这个函数的接口是:
此实现省略了边缘处理,因此图像的宽度和高度都必须能被stride整除。
输入
x: 输入图像。shape=(channels, height, width)
输出
y: 输出图像。shape=(channels, height/stride, width/stride)
参数
width: 图像宽度
height: 图像高度
stride:减速比
ReLU
ReLU 非常简单,因为它只是将负值设置为 0。
voidrelu(constfloat*x,int64_tsize,float*y){
for(int64_ti=0;i< size; ++i) {
y[i] = std::max(x[i], .0f);
}
}
由于每个元素的处理是完全独立的,x, y因此未指定内存布局。
硬件生成
到这里为止的内容,各层的功能都已经完成了。按照上一篇文章中的步骤,可以确认这次创建的函数也产生了与 libtorch 相同的输出。
此外,Vivado HLS 生成了一个通过 RTL 仿真的电路。从这里开始,我将简要说明实际生成了什么样的电路。
如果将上述linear函数原样输入到 Vivado HLS,则会发生错误。这里,将输入输出设为指针->数组是为了决定在电路制作时用于访问数组的地址的位宽。
另外,in_features的值为778=392,out_将features的值固定为32。这是为了避免Vivado HLS 在循环次数可变时输出性能不佳。
staticconststd::size_tkMaxSize=65536; voidlinear_hls(constfloatx[kMaxSize],constfloatweight[kMaxSize], constfloatbias[kMaxSize],floaty[kMaxSize]){ dnnk::linear(x,weight,bias,7*7*8,32,y); }
linear_hls函数的综合报告中的“性能估计”如下所示:
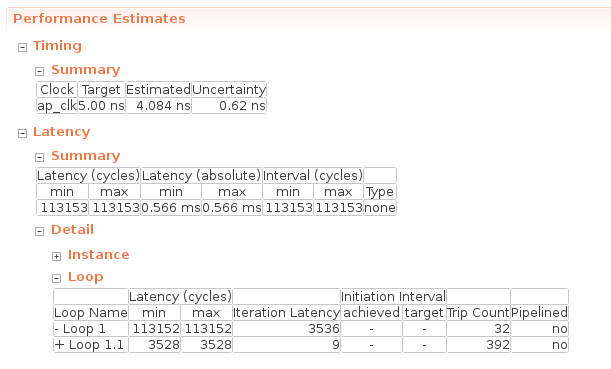
在Timing -> Summary中写入了综合时指定的工作频率,此时的工作频率为5.00 ns = 200MHz。
重要的是 Latency -> Summary 部分,它描述了执行此函数时的周期延迟(Latency(cycles))和实时延迟(Latency(absolute))。看看这个,我们可以看到这个全连接层在 0.566 ms内完成。
在 Latency -> Detail -> Loop 列中,描述了每个循环的一次迭代所需的循环次数(Iteration Latency)和该循环的迭代次数(Trip Count)。
延迟(周期)包含Iteration Latency * Trip Count +循环初始化成本的值。Loop 1 是out_features循环到loop 1.1 in_features。
在Loop1.1中进行sum += x[j] * weight[i * in_features + j]; 简单计算会发现需要 9 个周期才能完成 Loop 1.1 所做的工作。
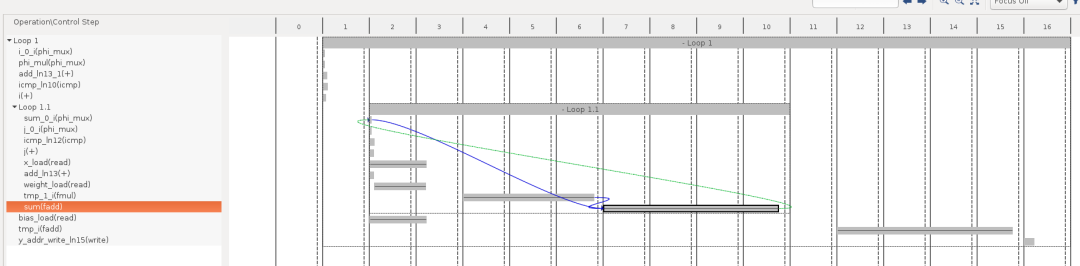
使用HLS中的“Schedule Viewer”功能,可以更详细地了解哪些操作需要花费更多长时间。
下图横轴的2~10表示Loop1.1的处理内容,大致分为x,weights等的加载2个循环,乘法(fmul)3个循环,加法(fadd)4个循环共计9个循环。
在使用 HLS 进行开发期间通过添加#pragma HLS pipeline指令,向此代码添加优化指令以指示它创建高效的硬件。
与普通的 FPGA 开发类似,运算单元的流水线化和并行化经常用于优化。通过这些优化,HLS 报告证实了加速:
流水线:减少迭代延迟(min=1)
并行化:减少行程次数,删除循环
正如之前也说过几次的那样,这次的课程首先是以FPGA推理为目的,所以不会进行上述的优化。
最后,该函数的接口如下所示。
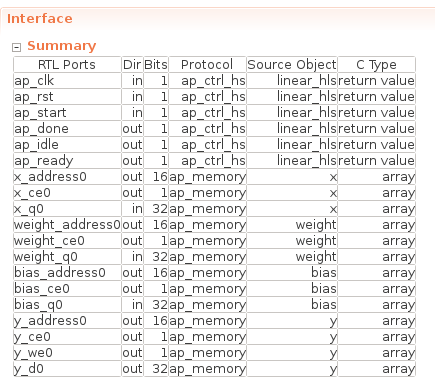
由于本次没有指定接口,所以数组接口如x_ 等ap_memory对应FPGA上可以1个周期读写的存储器(BRAM/Distributed RAM)。
在下一篇文章中,我们将连接每一层的输入和输出,但在这种情况下,我们计划连接 FPGA 内部的存储器作为每一层之间的接口,如本例所示。
总结
在本文中,我们实现了全连接层、池化层和 ReLU。现在我们已经实现了所有层,我们将在下一篇文章中组合它们。之后我们会实际给MNIST数据,确认我们可以做出正确的推论。
审核编辑:刘清
-
FPGA
+关注
关注
1631文章
21808浏览量
606793 -
DRAM
+关注
关注
40文章
2334浏览量
184010 -
sram
+关注
关注
6文章
769浏览量
114963 -
C语言
+关注
关注
180文章
7616浏览量
138065
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论