 图形化嵌入式系统设计助力救生蜘蛛机器人
图形化嵌入式系统设计助力救生蜘蛛机器人
六足机器蜘蛛设计用于在恶劣、崎岖的环境中操作,具有最高的自由度,可实现最佳机动性。低开发风险、最高功能和智能嵌入式软件与新颖独特的设计方法相结合,将图形编程与高计算处理性能和超低能耗方案相结合。关键 技术 包括 Blackfin 处理 器、 用于 Blackfin 处理 器 的 NI LabVIEW 嵌入式 模 块 和 ZMobile 混合 信号 平台。
专为恶劣环境中的任务而设计
任何救生设备的主要目的是防止额外的生命损失,同时尽快找到任何伤亡人员。考虑到这一点,六足机器蜘蛛的开发已经完成,以支持灾难任务期间的救援行动,例如地震后倒塌的建筑物,以增强完整的机器人解决方案。由于其机动性、体积小和机载智能,蜘蛛可以避开各种障碍物,进入难以到达的位置寻找被困的受害者。在危险任务中取代人类(例如,扫雷和中和雷区)是另一个潜在的应用领域。这些挑战可以通过高度移动的步行计划来应对。
六个独立的支腿允许机器人以全向方式移动,即使在机器人通常无法移动或有风险的地形上也是如此。“行走”和“旋转”属于基本的高级运动模式,已被六足昆虫采用。三个移动和三个抬起的“脚”可实现所需的步行速度,从而提供恶劣地形所需的足够平衡。“爬行”是一种特殊的运动,允许机器人挤过狭小的空间和狭窄的插槽。
多功能机电一体化系统
腿部力学和运动控制是蜘蛛机器人的主要特征。共有 24 个智能直流有刷电机不仅驱动腿部,还充当行走机械师的组成部分。这导致了坚固而轻巧的结构,降低了功耗并改善了运动动态。
除了腿部外,六足机器人还具有典型的自主机器人子系统,包括机器视觉、距离测量和无线通信。嵌入式硬件和两个7.2 V锂聚合物电池(包括电量计)位于机器人的刚体中。任务参数、I/O 设置和新的运动步态可以通过无线传输或通过可移动介质传输。
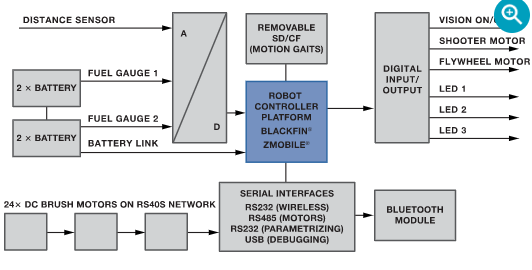
图3.ZMobile平台集成并链接全过程I/O,提供高级功能块。
具有 24 个自由度 (24DOF) 的智能运动
蜘蛛的低级运动依赖于运行时计算的复杂数学模型。得益于ADI公司Blackfin处理器的巨大嵌入式计算能力和Schmid Engineering的确定性实时服务,运动看起来坚定、动态和平稳。高级 LabVIEW VI(垂直 仪器 ) 以及 手动 优 化 的 Blackfin 数学 库 用于 连续 运行 的 逆 运动 学 算法。该算法包括三角函数和矩阵运算,找到合适的关节角,Θ1和 Θ2,以在空间 (X, Y, Z) 中沿所需轨迹精确地移动末端执行器。根据高级运动模式,轨迹矢量沿计算的直线、矩形或圆移动。
轨迹可以通过三种不同的方式进行编程:
示教和回放是设计和训练新模式或特殊模式的常用技术
3D CAD软件允许目视检查模拟轨迹。模型 将 导出 为 虚拟 实 境 文件, 并 导入 到 LabVIEW 的 图片 控制 中。现在,通过比较虚拟模型和真实模型来调整运动。
通过反向运动学算法在运行时连续计算轨迹。
这是对所有六个支腿的所有关节角度并行完成的,从而为所有电机连续计算 24 个设定点,以确保动态运动。这些设定点通过串行RS-485网络传输到每个电机,并由分散式PD控制器转换为物理动作。所有 24 个执行器的位置反馈和温度读数都通过同一网络获取。两个机器人在新加坡机器人比赛中同时表演的著名肢体舞展示了出色的运动能力。
智能视觉和距离感应
除了智能运动和运动自由之外,智能摄像头和距离测量传感器还出现在蜘蛛机器人的“眼睛”中。物体和物质通过高性能图像处理算法进行定位和跟踪,例如在感兴趣区域内查找质心。“眼睛”也可以编程以识别其附近的任何颜色。未来的版本将包括改进的图像处理、模式匹配和边缘检测:利用Blackfin处理器的计算能力和高速图像采集,将智能视觉提升到一个新的水平。
蓝牙无线通信
提供与机器人在任何级别进行通信的能力,与“外部世界”保持永久无线蓝牙通信接口:
在开发和测试期间调试 ZMobile 快速调试模式的通道。
读取电机状态和电池电量等关键参数以进行系统诊断。在线获取重要的算法变量以进行调优。
在行动前下载新的任务数据。
在机器人竞赛期间,两只机器人蜘蛛通过无线通信通道连接起来,以同步它们的动作(见图6)。这是一个更严重场景的原型,其中几个机器人蜘蛛被赋予一个团队完成的任务。
ZMobile低功耗嵌入式硬件
超低功耗混合信号ZMobile模块是蜘蛛机器人的“心脏”。该 模 块 由 Blackfin 处理 器 和 LabVIEW 嵌入式 驱动 技术, 由 瑞士 解决 方案 供应 商 施密德 工程 公司 提供。将传感器、执行器、视觉、电池和无线通信集成到一个平台上。南洋理工学院选择ZMobile平台有三个原因:
首先, 在 LabVIEW 中 对 蜘蛛 进行 编 程, 使 机器人 设计 人员 能够 从 第一天 开始 就 专注于 这个 尖端 项目 的 主要 功能。由于图形编程的高生产率,系统工程师能够添加比同一开发期间最初指定的更多的功能。
其次,超低能耗方案,如ZMobile动态电源管理,是该自主机器人的一个重要功能,因为现在可以大大延长操作时间。这同样适用于ZMobile模块的功耗,该功耗在毫瓦范围内,允许电机使用存储在车载电池中的大部分剩余能量。
第三,可扩展的过程I/O插槽为将来集成更多传感器和执行器提供了空间。
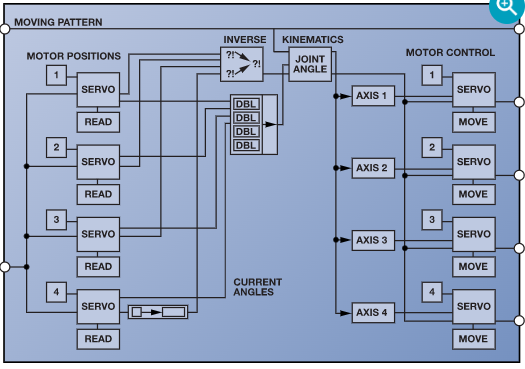
图7.NI LabVIEW 嵌入式 模 块 用于 Blackfin 处理 器 生成 实 时 代码, 并 部署 在 低功耗 Blackfin 目标 ZMobile 模 块 上。
实时图形嵌入式软件
整个 蜘蛛 机器人 应用 软件 使用 LabVIEW 嵌入式 模 块 进行 编 程, 该 模 块 在 了 LabVIEW 的 Blackfin 处理 器 2.5 上, 由 Schmid Engineering 的 ZBrain BSP 为 NI LabVIEW 进行 扩展 (见 图 8)。这提供了理想的嵌入式软件平台,提供高级编程、图形调试、图形多任务处理,同时提供确定性的实时行为。
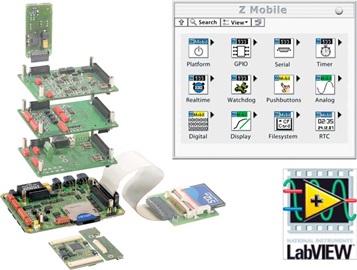
图8.整个 机器人 由 ZMobile 混合 信号 模 块 控制, 该 模 块 由 Blackfin 处理 器 和 LabVIEW 嵌入式 模 块 驱动 用于 Blackfin 处理 器 的 LabVIEW 嵌入式 模 块。
面向对象的设计模式有助于进一步管理图形级别的复杂性。主要对象,如电机或传感器,由函数全局变量抽象化,代表LabVIEW中的类。
主应用程序框架由几个任务组成:
顶级主循环计划操作,由通过软件队列和同步方法(如信号量)连接到其他循环的经典状态机表示。
通信任务保持与外界的无线数据连接。
视觉任务负责低级图像处理和测距。
运动任务管理高级运动模式和低水平肢体控制,并监控电机的位置和状态。
内务处理任务充当常见的错误处理程序。检测事件和错误并将其记录到可移动媒体以及时间戳中,以供以后检索。ZMobile 等功能(如看门狗、重新启动和带编程唤醒的关机)是在错误自我更正(例如错误回滚)不成功时从头开始重新启动的有效方法。
这些循环在协作式多任务环境中作为线程同时运行。毫秒级的上下文切换和驱动器级别的微秒级实时确定性可确保平稳和无故障的移动。最后,制造商的板级支持包满足了对每个软件组件和设备驱动程序线程安全的繁重并行性要求。
结论
由于 LabVIEW 嵌入式 模 块 用于 Blackfin 处理 器 的 图形 化 编 程 模型 和 Blackfin 处理 器 的 高 处理 器 性能, 我们 的 开发 时间 非常 成功, 开发 时间 也 大大 缩短。Schmid Engineering的图形快速调试模式被证明是算法工程过程中的另一个助推器,将开发时间缩短了五倍。因此,ZMobile模块可以被视为用户友好型嵌入式系统工程的“杀手级产品”,不仅适用于机器人设计人员,也适用于任何构建机电一体化系统的人。视觉、更智能的电源管理和能量收集方案、传感器融合、模糊逻辑和 GPS 数据收集方面的进步是有望添加到通用机电一体化平台的组件。此外,计划在其他移动,自主,生物启发的机器人中重复使用模块化硬件和软件系统,例如以蛇为模型的机器人。
审核编辑:郭婷
-
处理器
+关注
关注
68文章
19317浏览量
230098 -
嵌入式
+关注
关注
5086文章
19140浏览量
305865 -
LabVIEW
+关注
关注
1974文章
3656浏览量
324126
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论