 如何实现双轮差速底盘躲避悬崖的功能?
如何实现双轮差速底盘躲避悬崖的功能?
1. 功能说明
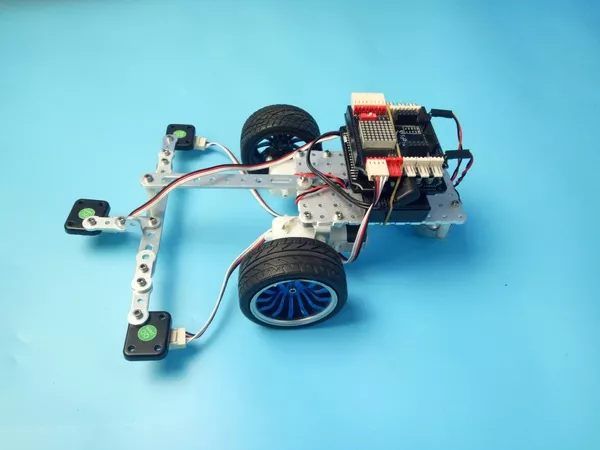
本实验使用的样机为R023样机小型双轮差速底盘。在样机前方安装3个近红外传感器 ,实现机器人躲避悬崖、在某平台上移动时不会掉下去的效果。
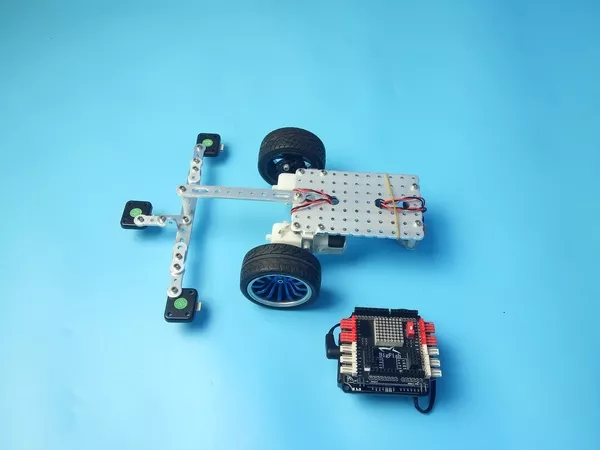
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1 |
| 传感器 | 近红外传感器 |
| 电池 | 7.4V锂电池 |
左轮直流电机连在D9,D10接口上;右轮直流电机连在D5,D6接口上;3个近红外传感器从左到右分别连在A0、A4、A3接口上。
3. 示例程序
编程环境:Arduino 1.8.19
编写并烧录以下程序(nine.ino),该程序将实现演示视频中的动作【完整资料请参考https://www.robotway.com/h-col-113.html】
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2023-02-10 https://www.robotway.com/ ------------------------------------------------------------------------------------*/ void Right(); void Left(); void Stop(); void Forward(); void Back(); void setup() { pinMode( 17, INPUT); pinMode( 18, INPUT); pinMode( 14, INPUT); pinMode( 10, OUTPUT); pinMode( 6, OUTPUT); pinMode( 5, OUTPUT); pinMode( 9, OUTPUT); } void loop() { if (((!( digitalRead(14)) && ! (digitalRead(17)) ) )) { Forward(); } if (( digitalRead(14) )) { Left(); delay( 300 ); } if (( digitalRead(17) )) { Right(); delay( 300 ); } if (( digitalRead(18) )) { Back(); delay( 1000 ); analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 100); delay( 1500 ); } } void Right() { analogWrite(5 , 0); analogWrite(6 , 0); analogWrite(9 , 100); analogWrite(10 , 0); } void Forward() { analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 100); analogWrite(10 , 0); } void Back() { analogWrite(5 , 0); analogWrite(6 , 100); analogWrite(9 , 0); analogWrite(10 , 100); } void Left() { analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 0); } void Stop() { analogWrite(5 , 0); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 0); }
4. 扩展
本实验采用3个近红外传感器,利用的是近红外传感器能够识别到距离较近的桌面,无法识别到距离较远的地面,因此桌面要距离地面远一些。
本实验还可以使用灰度传感器或者白标传感器。利用的是灰度和白标在悬崖处极难收到反射回来的红外线的原理,因此相应的桌面必须是浅色,如果桌面也是深色,灰度和白标传感器就无法区分桌面和悬崖了。
审核编辑黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2550文章
51046浏览量
753140 -
机器人
+关注
关注
211文章
28390浏览量
206957 -
编程
+关注
关注
88文章
3614浏览量
93698
发布评论请先 登录
相关推荐
底盘电控系统HIL仿真测试解决方案
底盘电控系统作为整车电子电气系统中的重要一部分,不仅可以改善驾乘的舒适性,同时也保证了驾乘的安全性,是汽车主动安全功能实现的重要一环。经纬恒润推出的底盘电控HIL仿真测试设备可以满足乘

一文了解底盘域控之制动功能
)Twobox-iBooster+ESP2)Onebox-IPB3驻车制动系统3.1驻车制动系统基础3.2EPB的功能3.3EPB的实现方案1底盘域控基础1.1底盘域
请问ADS8684+INA816实现模拟差分输入功能是否可行?
我需要下图表格参数模拟信号的检测。打算使用TI ADS8684来实现模拟信号采集,但是ADS8684不支持差分信号输入,计划用INA816把差分转成单端信号送到ADS8684芯片,来实现
发表于 12-13 14:05
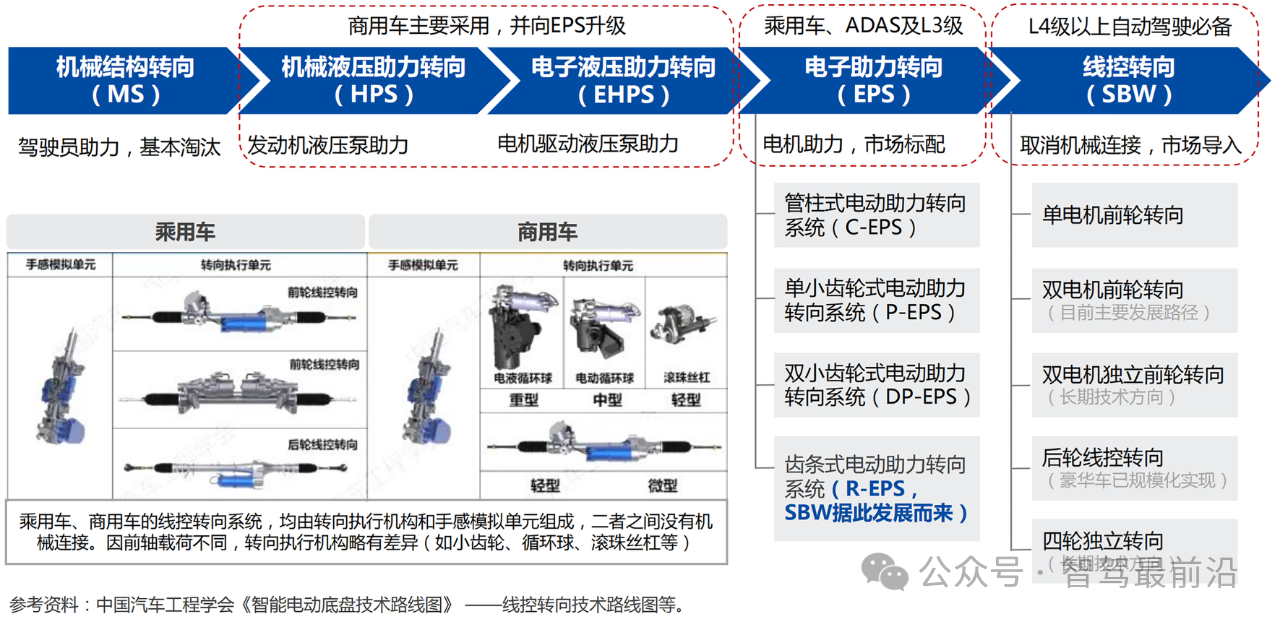
线控底盘如何让自动驾驶加速奔跑?
线控底盘技术是智能驾驶系统的核心技术之一,通过电子信号取代传统的机械传动,实现车辆动力、转向、制动、悬架及换挡等功能的精准控制。它不仅是实现L3及以上自动驾驶的关键,也是推动智能化汽车
智能底盘持续发展,底盘域MCU的国产机会
电子发烧友网报道(文/梁浩斌)智能汽车时代,自动驾驶、智能座舱是感知最强的体验升级。但对于汽车来说,底盘决定了乘坐舒适度和车辆动态,甚至关系到行驶安全,底盘永远是汽车不可忽视的部分。而伴随整车电子

线控底盘,自动驾驶时代的基石?
结合市场发展趋势和政策支持,展望了未来技术的应用前景。 线控底盘的定义与重要性 1.1 线控底盘的概念与发展背景 线控底盘(X-by-wire)技术通过电子信号取代传统的机械连接和液压系统,

凤凰动力-AGV差速驱动轮的工作原理
凤凰动力致力于提供多元化的AGV核心零部件产品。包括卧式/立式驱动轮、卧式/立式舵轮、电转向轮、差速舵轮组、AGV专用高精密脚轮、低压伺服电机、伺服减速电机、伺服驱动器、专用连接器和高精密行星减速机
双速电机与单速电机的区别
在电机技术领域,双速电机和单速电机是两种常见的电机类型。它们在结构、工作原理、性能特点以及应用领域等方面都存在显著的差异。本文将对双速电机和单速电机的区别进行详细的阐述,以便读者能够更
智己L6纯电轿车搭载数字底盘,具备预判救车功能
其中值得注意的是,新车搭载了名为“灵蜥数字底盘”的技术设备,据说能够实现在85公里以上的高速公路上进行“麋鹿测试”,这是一种模拟前方突发障碍物的紧急避障性能测试。
探讨底盘的发展历程及趋势
自汽车诞生一百余年以来,底盘发展就和汽车发展深度绑定。底盘系统决定了汽车纵向、横向和垂向六个自由度的动态行为,是汽车能够跑运行的必要条件。
发表于 04-11 10:13
•644次阅读
差速器工作原理 差速器的传动特点是差速不差力对吗
差速器是一种广泛应用于汽车的机械装置,其主要作用是在车辆行驶时发挥差速作用,从而使车辆在转弯、过坎等情况下能够保持稳定。差速器的工作原理十分复杂,涉及到许多力学和工程原理,下面我们将详细介绍差速器
差压变送器功能及特点概述
差压变送器功能及特点概述 差压变送器是一种常用于工业过程控制和测量领域的仪表设备,主要用于测量两个压力源之间的压力差,并将其转换为一个标准化的电信号输出。它的
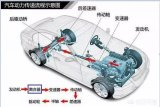
汽车底盘构造名称图解
底盘作用是支承、安装汽车发动机及其各部件、总成,形成汽车的整体造型,并接受发动机的动力,使汽车产生运动,保证正常行驶。底盘由传动系、行驶系、转向系和制动系四部分组成。
发表于 01-17 11:28
•1081次阅读





 工商网监
工商网监
评论