 用于模拟接口的超级放大器和滤波器
用于模拟接口的超级放大器和滤波器
一种普遍的观点认为,数字电路只是自然工作,但模拟电路很难实现。这种古老的信念是有道理的——模拟接口是一门需要培训的专家学科。此外,避免问题总是比以后尝试解决问题更好。这就是为什么我们应该利用经验丰富的模拟工程师作为反射执行的一些基本概念。本应用笔记提供了一些关于放大器和滤波器的基本提醒和概念,供您在设计时考虑。
介绍
作为孩子,我们学会了分享,在这个过程中,我们了解了部分。许多父母教给孩子这一点,让一个孩子切馅饼或蛋糕,然后让另一个孩子先挑一块。我们可以肯定,我们非常小心地使这些碎片的尺寸都相同。
我们想起了生活中的一个很好的教训,“比例很重要。我们在日常生活中比较不同路线之间的距离或两种食物的味道时,会使用比率。(是的,妈妈的厨艺更好,或者我们太小了,不知道有什么区别?
从儿童、馅饼和蛋糕转向模拟工程设计,我们意识到比率(相对数量、比例、百分比、份额、零件和分数)都是模拟设计中的重要度量。当我们忽略这些比例和关系时,我们会将人为错误引入到必须是一个精确的过程中。本应用笔记分享了一些关于放大器和滤波器的模拟概念,这些概念将有助于减少“人为”误差的几率并改进模拟设计。
信噪比 (SNR) 的注意事项
串扰和信噪比(SNR)表示为比率,即好与坏的比例。如何提高信号的信噪比?如果特定电路贡献了相当大的噪声,我们有两个基本选择:第一,以某种方式降低噪声,第二,在好信号通过级之前增加其幅度。图 1 说明了该概念。
图1.电源噪声被添加到信号中。
在这篇配套文章中,我们将研究如何控制信号路径中的噪声。我们将在各个电路阶段讨论信号和噪声的特性。
开关电源的主要噪声源是谐波吗?如果电源噪声为50kHz或更高,并且我们想要的信号为1kHz,则滤波可能是可行的。如果我们接下来要进入ADC,抗混叠滤波器可能会有所帮助。
降低噪音
经验丰富的电路设计人员会评估哪些可能性?最简单的解决方法是在添加噪声之前放大信号。是的,足够简单,但不幸的是,这种解决方案通常无法使用,因为输入信号已经存在噪声。所以现在我们发挥创造力,考虑如何将信号与噪声分开?我们可以使用高通、低通或带通滤波器吗?我们能否根据幅度、限幅、噪声消隐或取芯进行区分?我们可以在引入噪声之前使用预加重,在引入噪声之后使用去加重来提高信噪比吗?我们是否可以根据时间进行区分,即以最小的噪声水平或干扰时间进行采样?我们是否可以对时间平均,或者如果信号是重复的,我们是否可以对周期求和或两个、三个或更多维度的平均值?
从组件功能转向,考虑整个系统。系统目标是什么?如何使用该系统?人类的感官将如何与系统提供的信息相互作用?简而言之,考虑我们可以收集的所有信息。
上述问题反映了丰富的设计经验和知识。这正是聪明的公司聘请经验丰富的工程师并指导新工程师建立坚实的设计团队的原因。
我们可以用一个例子来说明思考和发展过程。第一个观察发现,系统的输入端有一个高增益运算放大器。运算放大器为模数转换器(ADC)供电。信号上偶尔会出现较大的噪声脉冲,这会导致运算放大器饱和。运算放大器的恢复时间可能长达毫秒或秒。我们将如何处理这个问题?由于每个案例都会有所不同,我们只会提出问题并指出可能的解决方案。
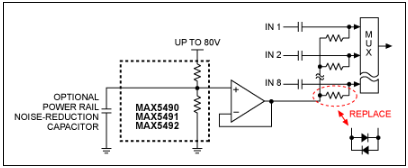
首先,收集数据以尝试了解正在发生的事情。我们可以修复源头吗?不。因此,我们认为噪声峰值是不可避免的。我们对它的上升时间幅度和持续时间了解多少?如果尖峰非常快且狭窄,而我们想要的信号相对较慢,我们可以通过滤波将它们分开吗?我们能否检测到尖峰并打开串联开关以消除主路径中的尖峰?我们是否可以添加一对像静电放电(ESD)结构这样的二极管来削波任何高于VCC或低于地面的信号?在该应用笔记的图2中,我们在VCC和地之间以所需信号的平均信号电平创建电压。如果将串联电阻替换为一对背靠背二极管(图 2),则信号尖峰将限制在电压 ±硅二极管(红色虚线)为 0.6V,肖特基二极管为 ~±0.3V(绿色虚线)。硅二极管的反向恢复时间可以在一百到几百纳秒之间。肖特基二极管对于小信号二极管的开关时间为~100ps,但由于其工作物理特性,没有反向恢复时间。二极管也可以放置在运算放大器反馈环路中,以降低尖峰期间的增益。图 3 显示了限制的效果。
图2.用一对背靠背二极管代替串联电阻。
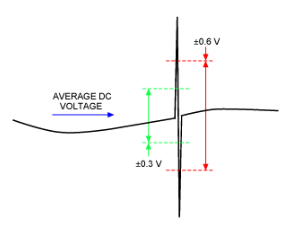
图3.二极管限幅器效应,±0.3V肖特基,±0.6V硅。
图3可能有助于缓解运算放大器饱和和恢复时间,但这足够吗?我们可以添加电路来消除噪声脉冲,如图4所示。
图4.噪声脉冲消隐。
消隐电路的框图如图5所示。
图5.噪声消隐框图。
从图5中消隐的基本概念来看,可以添加更多的优雅。如果源为低阻抗,则可能不需要输入缓冲器。R1和R2设置直流值,如上文应用笔记4344“轨道分离器,从亚伯拉罕·林肯到虚拟接地”所示。或者,输入信号可以是交流耦合到相同的电压,或者可以长期平均输入信号以产生该电压。主信号路径是从输入缓冲器通过RC延迟、多路复用器、缓冲器和低通滤波器到ADC。MAX11203 ADC具有1个由SPI接口控制的通用输入或输出(GPIO)端口。GPIO设置为MAX313多路复用器的AIN2导通,AIN0关断。我们高通或区分噪声脉冲。双通道或窗口比较器输出将处于活动状态,而正向或负方向的噪声脉冲超过3.<>V。异或门控将逻辑反相至多路复用器,从而关闭主路径并接通直流电压。RC延迟还会延迟主路径足够长的时间,以使比较器路径改变状态。如果RC延迟使信号带宽降低太多,则可以使用LC延迟线代替。
图5所示的输入缓冲器可以使用MAX4209仪表放大器,尽管增益很高,但失调漂移极低。
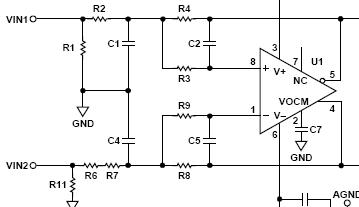
图5所示ADC之前的滤波器可以控制信号带宽,以满足奈奎斯特抗混叠、降低噪声或软化残余消隐毛刺。使用电阻分压器调节差分输入,并使用稳定的基准电压源来失调输入。该电路设计使输入范围为0V至5V的ADC(例如MAX1402)能够接受+10.5V至-10.5V范围内的输入。
Maxim具有看门狗电路,可确保微处理器控制的设备在处理器失去控制时以已知方式做出反应。
微处理器控制的系统时钟通常有两种类型:以有序方式控制计算功能的系统时钟,以及与人类时间概念相关的实时时钟(RTC)或时钟。计算机时钟像士兵有节奏地行进一样运作。这可能导致干扰产品可能不符合法规要求。
结论
每个电路和系统中的噪声和干扰控制都不同。值得庆幸的是,物理定律占了上风,工程师必须努力消除噪音。该讨论试图帮助设计人员在设计开始之前和设计过程中预测噪声和干扰问题。产品投入生产后,修正的选择受到严重限制。
-
放大器
+关注
关注
144文章
13720浏览量
214747 -
滤波器
+关注
关注
161文章
7919浏览量
179506 -
SNR
+关注
关注
3文章
197浏览量
24596
发布评论请先 登录
相关推荐
模拟滤波器向导设计工具为滤波器选择正确的放大器
模拟滤波器注入噪声原理及设计
如何使用模拟滤波器注入噪
D类放大器的LC滤波器如何设计?LC滤波器设计方法和资料详细e指导

电子系统中用于模拟接口的超级放大器和滤波器
减少人为错误的机会:用于模拟接口的超级放大器和滤波器






 工商网监
工商网监
评论