 Linux PWM开发指南
Linux PWM开发指南
Linux PWM 开发指南
1 概述
1.1 编写目的
介绍 PWM 模块的详细设计方便相关人员进行 PWM 模块的代码设计开发。
1.2 使用范围
适用于 Linux-3.10,linux-4.4 和 Linux-4.9 内核,Linux-5.4 内核。
1.3 相关人员
PWM 驱动的开发人员/维护人员等
2 术语及概念
2.1 术语定义及缩略语
| 术语 | 解释说明 |
|---|---|
| Sunxi | 指 Allwinner 的一系列 SOC 硬件平台 |
| 频率 | PWM 的频率决定了所模拟电平的平滑度(逼真度),人耳感知的频率范围为 20Hz-16Khz,注意 PWM 的频率不要落在这个区间 |
| 占空比 | 决定了一个周期内 PWM 信号高低的比例,进而决定了一个周期内的平均电压,也就是所模拟的电平的电压 |
| 极性 | 决定了是高占空比的信号输出电平高,还是低占空比信号输出电平高。假设一个信号 的占空比为 100%,如果为正常极性,则输出电平最大,如果为翻转的极性,则输出 电平为 0 |
| 开关 | 控制 PWM 信号是否输出 |
| PWM对 | 电机等硬件需要两路脉冲信号来控制其正常运转,一般两路极性相关,频率,占空比 参数相同的 PWM 构成一个 PWM 对 |
| PWM死区控制时间 | 大功率电机,变频器等由大功率管,IGBT 等元件组成 H 桥或 3 相桥,每个桥的上 半桥和下半桥是绝对不能导通的,在 PWM 信号驱动这些元件时,往往会由于没有延 迟而造成未关断某路半桥,这样会造成功率元件的损坏,在 PWM 中加入死区时间的 控制即是让上半桥关断后,自动插入一个事件,延迟后再打开下半桥 |
2.2 概念阐述
脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的 使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
PWM 模块属于 PWM 子系统,会调用 PWM 子系统的相关接口(详情可以查看 PWM 子系 统知识)
3 模块描述
3.1 模块功能
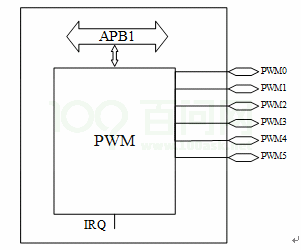
图 3-1: 模块功能
不同平台上拥有不同个数的 PWM 通道,其中两个为一个 PWM 对(平台通道数不相同,PWM 对也就不相同,具体细节可以查看对应方案的 spec)。其中 PWM 具有以下特点:
• 支持脉冲,周期和互补对输出 • 支出捕捉输入
• 带可编程死区发生器,死区时间可控
• 0-24M/100M 输出频率范围。0%-100% 占空比可调,最小分辨率 1/65536
• 支持 PWM 输出和捕捉输入产生中断
3.2 模块位置
PWM 模块属于硬件驱动层,直接与硬件通信
3.3 模块配置
3.3.1 linux-4.9
在 linux-4.9 中, 在命令行中进入内核根目录,执行 make ARCH=arm(arm64) menuconfig 进入配置主界面,并按以下步骤操作:
首先,选择 Device Drivers 选项进入下一级配置,如下图所示:
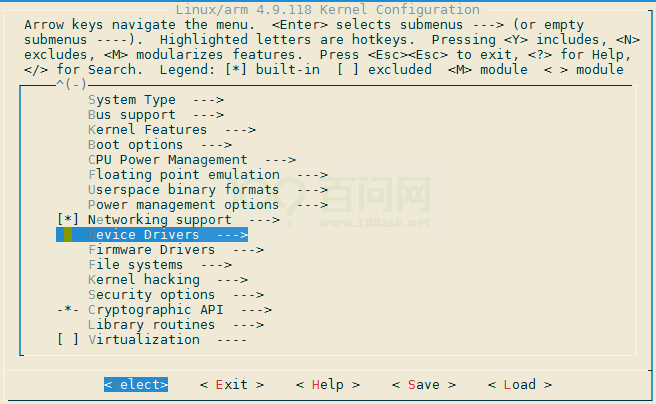
图 3-2: Device Drivers
选择 Pulse-Width Modulation (PWM) Support 进入下一步配置,如下图所示:
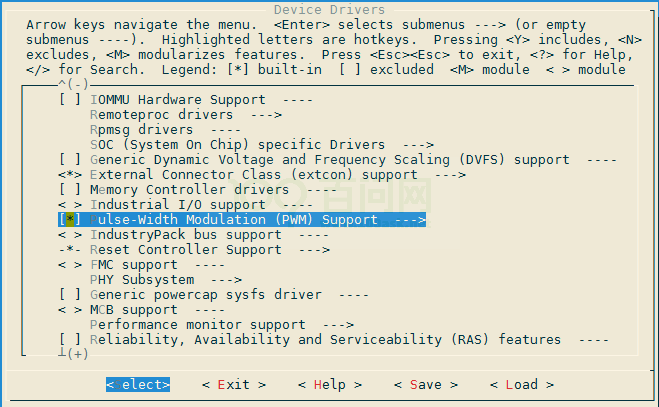
图3-3: Pulse-Width Modulation (PWM) Support
3.选择 SUNXI PWM SELECT 进入下一步配置,如下图所示:
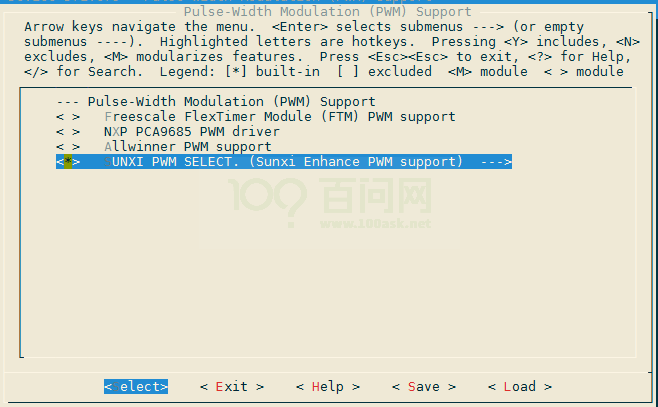
图3-4: SUNXI PWM SELECT
4.选择 Sunxi Enhance PWM support 配置
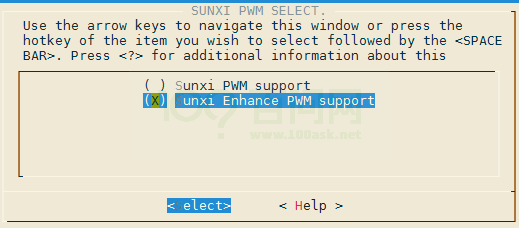
图 3-5: Sunxi Enhance PWM support
在 4.9 内核选择该配置,选择的是对应目录中的 pwm-sunxi-new.c 文件。也可以有以下配置; 在第 3 步中直接选择 Allwinner PWM support 选项,选择的是对应目录中的 pwm-sun4i.c 文件
在第 4 步中选择 Sunxi PWM Support 选项,选择的是对应目录中的 pwm-sunxi.c 文件
3.3.2 linux-5.4
linux5.4 平台中, 在命令行中进入内核根目录,执行./build.sh menuconfig 进入配置主界面, 并按以下步骤操作:
首先,选择 Device Drivers 选项进入下一级配置,如下图所示:
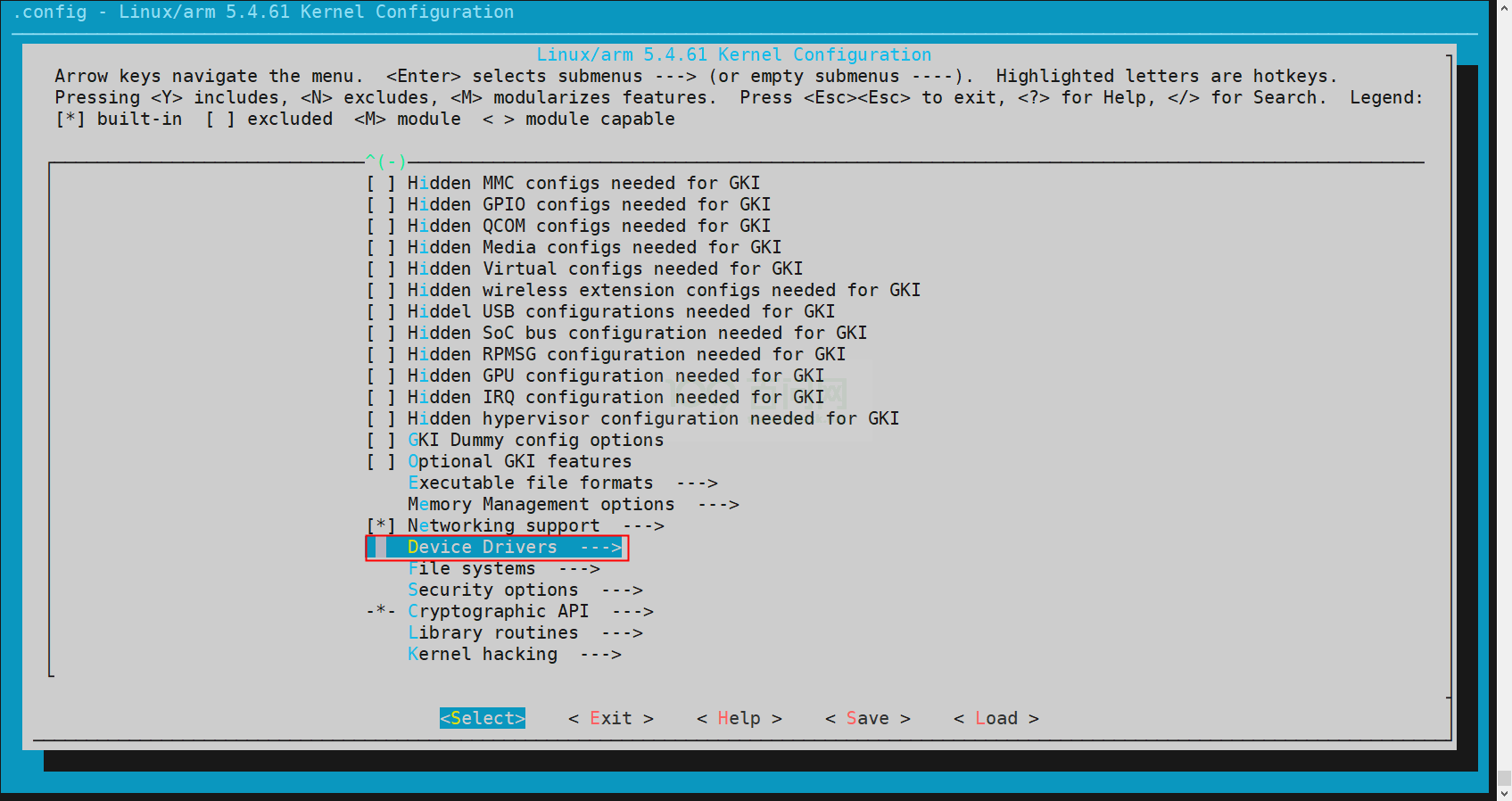
图 3-6: Device
选择 Pulse-Width Modulation (PWM) Support 进入下一步配置,如下图所示
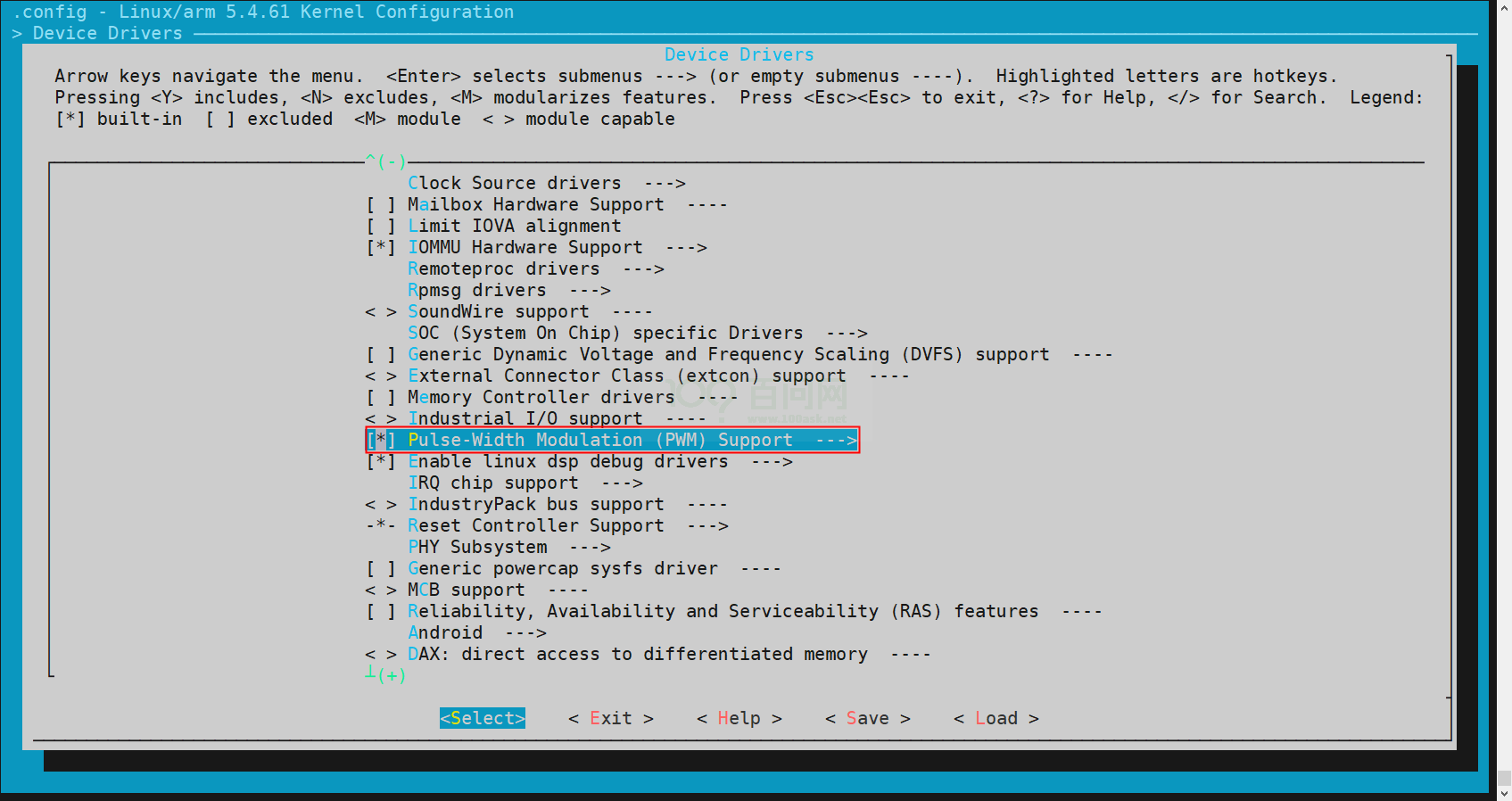
图 3-7: Pulse-Width Modulation (PWM) Suppor
选择 SUNXI PWM SELECT 进入下一步配置,如下图所示:
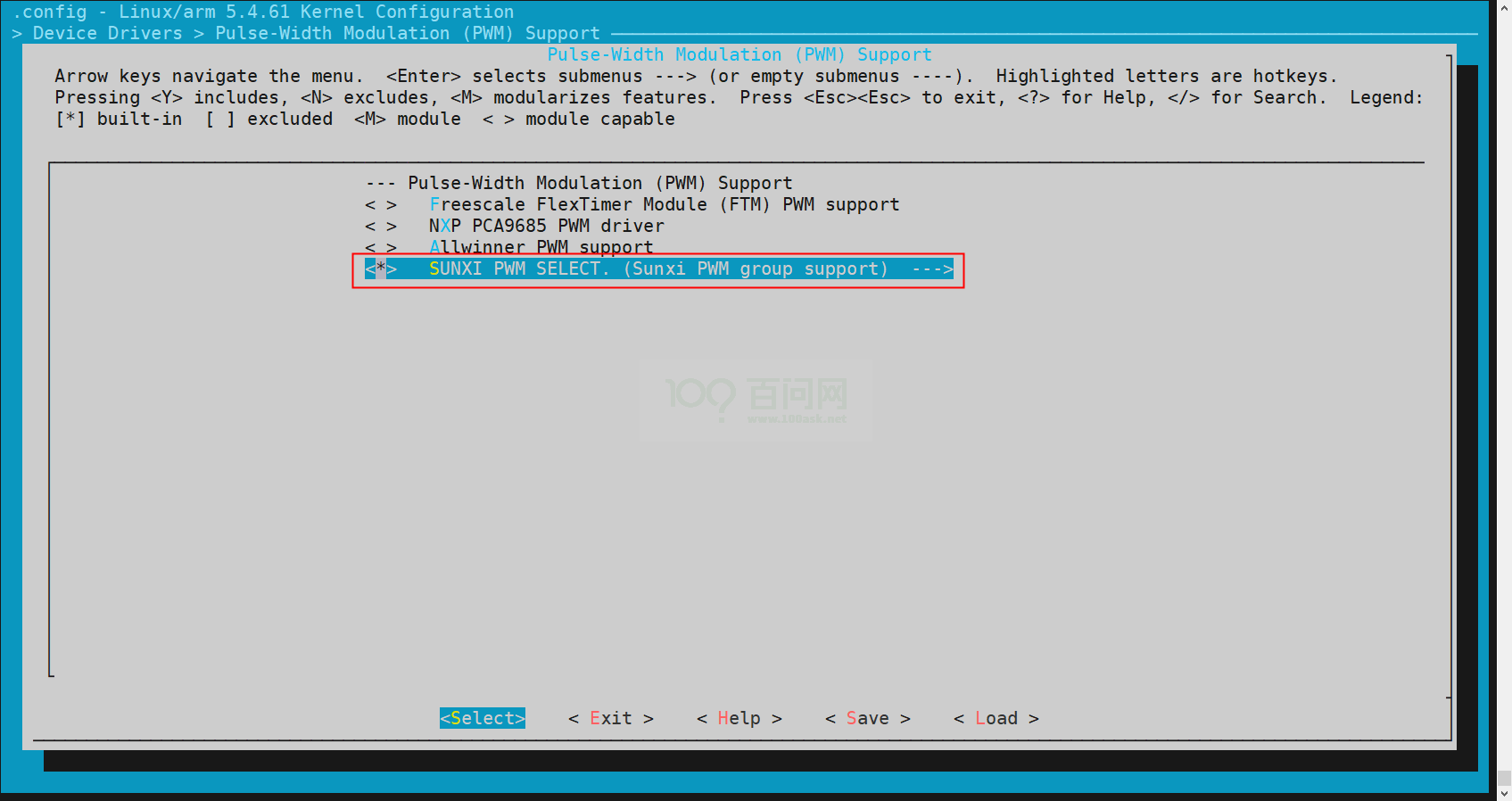
图3-8: SUNXI PWM SELECT
选择 Sunxi PWM group support 配置
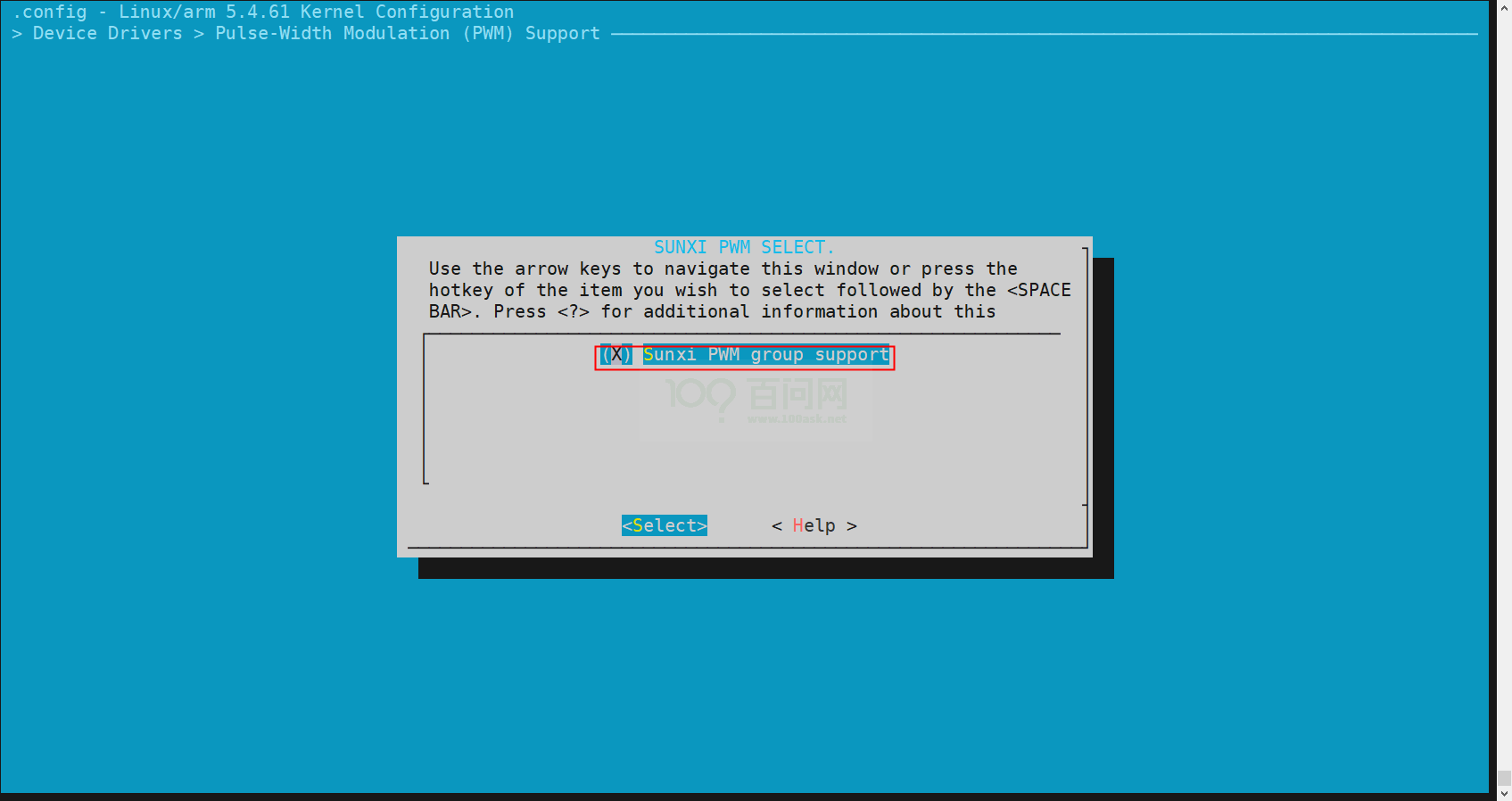
图3-9: Sunxi PWM group support
3.4 设备树配置
3.4.1 linux-4.9
PWM 模块在设备树中的配置如下所示:
pwm: pwm@0300a000 {
ompatible = "allwinner,sunxi-pwm";
reg = <0x0 0x0300a000 0x0 0x3c>; //寄存器地址配置
pwm-number = <1>; //pwm的个数
pwm-base = <0x0>; //pwm的起始序号
pwms = <&pwm0>, <&pwm1>;
};
s_pwm: s_pwm@0300a000 {
compatible = "allwinner,sunxi-s_pwm";
reg = <0x0 0x0300a000 0x0 0x3c>;
pwm-number = <1>;
pwm-base = <0x10>;
pwms = <&spwm0>;
};
注意,如果在模块配置中选择了 Sunxi PWM support 选项 (具体参数可以查看相关源文件),则 需要配置以下设备树:
pwm0: pwm0@01c23400 {
compatible = "allwinner,sunxi-pwm0";
pinctrl-names = "active", "sleep";
reg_base = <0x01c23400>;
reg_peci_offset = <0x00>;
reg_peci_shift = <0x00>;
reg_peci_width = <0x01>;
reg_pis_offset = <0x04>;
reg_pis_shift = <0x00>;
reg_pis_width = <0x01>;
reg_crie_offset = <0x10>;
reg_crie_shift = <0x00>;
reg_crie_width = <0x01>;
reg_cfie_offset = <0x10>;
reg_cfie_shift = <0x01>;
reg_cfie_width = <0x01>;
reg_cris_offset = <0x14>;
reg_cris_shift = <0x00>;
reg_cris_width = <0x01>;
reg_cfis_offset = <0x14>;
reg_cfis_shift = <0x01>;
reg_cfis_width = <0x01>;
reg_clk_src_offset = <0x20>;
reg_clk_src_shift = <0x07>;
reg_clk_src_width = <0x02>;
reg_bypass_offset = <0x20>;
reg_bypass_shift = <0x05>;
reg_bypass_width = <0x01>;
reg_clk_gating_offset = <0x20>;
reg_clk_gating_shift = <0x04>;
reg_clk_gating_width = <0x01>;
reg_clk_div_m_offset = <0x20>;
reg_clk_div_m_shift = <0x00>;
reg_clk_div_m_width = <0x04>;
reg_pdzintv_offset = <0x30>;
reg_pdzintv_shift = <0x08>;
reg_pdzintv_width = <0x08>;
reg_dz_en_offset = <0x30>;
reg_dz_en_shift = <0x00>;
reg_dz_en_width = <0x01>;
reg_enable_offset = <0x40>;
reg_enable_shift = <0x00>;
reg_enable_width = <0x01>;
reg_cap_en_offset = <0x44>;
reg_cap_en_shift = <0x00>;
reg_cap_en_width = <0x01>;
reg_period_rdy_offset = <0x60>;
reg_period_rdy_shift = <0x0b>;
reg_period_rdy_width = <0x01>;
reg_pul_start_offset = <0x60>;
reg_pul_start_shift = <0x0a>;
reg_pul_start_width = <0x01>;
reg_mode_offset = <0x60>;
reg_mode_shift = <0x09>;
reg_mode_width = <0x01>;
reg_act_sta_offset = <0x60>;
reg_act_sta_shift = <0x08>;
reg_act_sta_width = <0x01>;
reg_prescal_offset = <0x60>;
reg_prescal_shift = <0x00>;
reg_prescal_width = <0x08>;
reg_entire_offset = <0x64>;
reg_entire_shift = <0x10>;
reg_entire_width = <0x10>;
reg_active_offset = <0x64>;
reg_active_shift = <0x00>;
reg_active_width = <0x10>;
};
PWM 模块在 sys_config.fex 的配置如下所示:
[pwm0]
pwm_used = 1
pwm_positive = port:PB2<3><0>
[pwm0_suspend]
pwm_positive = port:PB2<7><0>
3.4.2 linux-5.4
PWM 模块在设备树中的配置如下所示:
pwm: pwm@2000c00 {
#pwm-cells = <0x3>;
compatible = "allwinner,sunxi-pwm";
reg = <0x0 0x02000c00 0x0 0x400>;
clocks = <&ccu CLK_BUS_PWM>;
resets = <&ccu RST_BUS_PWM>;
pwm-number = <8>;
pwm-base = <0x0>;
sunxi-pwms = <&pwm0>, <&pwm1>, <&pwm2>, <&pwm3>, <&pwm4>,
<&pwm5>, <&pwm6>, <&pwm7>;
};
pwm0: pwm0@2000c10 {
compatible = "allwinner,sunxi-pwm0";
pinctrl-names = "active", "sleep";
reg = <0x0 0x02000c10 0x0 0x4>;
reg_base = <0x02000c00>;
};
pwm1: pwm1@2000c11 {
compatible = "allwinner,sunxi-pwm1";
pinctrl-names = "active", "sleep";
reg = <0x0 0x02000c11 0x0 0x4>;
reg_base = <0x02000c00>;
};
pwm2: pwm2@2000c12 {
compatible = "allwinner,sunxi-pwm2";
pinctrl-names = "active", "sleep";
reg = <0x0 0x02000c12 0x0 0x4>;
reg_base = <0x02000c00>;
};
pwm3: pwm3@2000c13 {
compatible = "allwinner,sunxi-pwm3";
pinctrl-names = "active", "sleep";
reg = <0x0 0x02000c13 0x0 0x4>;
reg_base = <0x02000c00>;
};
pwm4: pwm4@2000c14 {
compatible = "allwinner,sunxi-pwm4";
pinctrl-names = "active", "sleep";
reg = <0x0 0x02000c14 0x0 0x4>;
reg_base = <0x02000c00>;
};
pwm5: pwm5@2000c15 {
compatible = "allwinner,sunxi-pwm5";
pinctrl-names = "active", "sleep";
reg = <0x0 0x02000c15 0x0 0x4>;
reg_base = <0x02000c00>;
};
pwm6: pwm6@2000c16 {
compatible = "allwinner,sunxi-pwm6";
pinctrl-names = "active", "sleep";
reg = <0x0 0x02000c16 0x0 0x4>;
reg_base = <0x02000c00>;
};
pwm7: pwm7@2000c17 {
compatible = "allwinner,sunxi-pwm7";
pinctrl-names = "active", "sleep";
reg = <0x0 0x02000c17 0x0 0x4>;
reg_base = <0x02000c00>;
};
在板级目录下的配置:
pwm3_pin_a: pwm3@0 {
pins = "PB0";
function = "pwm3";
drive-strength = <10>;
bias-pull-up;
};
pwm3_pin_b: pwm3@1 {
pins = "PB0";
function = "gpio_in";
bias-disable;
};
pwm7_pin_a: pwm7@0 {
pins = "PD22";
function = "pwm7";
drive-strength = <10>;
bias-pull-up;
};
pwm7_pin_b: pwm7@1 {
pins = "PD22";
function = "gpio_out";
};
&pwm3 {
pinctrl-names = "active", "sleep";
pinctrl-0 = <&pwm3_pin_a>;
pinctrl-1 = <&pwm3_pin_b>;
status = "okay";
};
&pwm7 {
pinctrl-names = "active", "sleep";
pinctrl-0 = <&pwm7_pin_a>;
pinctrl-1 = <&pwm7_pin_b>;
status = "okay";
};
具体通道配置按照需求进行配置.
3.5 源码结构
PWM 驱动的源代码位于内核的 drivers/pwm 目录下,具体的路径如下所示:
3.5.1 linux-4.9
drivers/pwm/
├── pwm-sunxi-new.c // Sunxi Enhance PWM support对应的PWM驱动
├── pwm-sunxi.c // Sunxi PWM support对应的PWM驱动
├── pwm-sun4i.c // Allwiner PWM support对应的PWM驱动
├── sysfs.c //PWM子系统的文件系统相关文件
├── core.c //PWM子系统的核心文件
3.5.2 linux-5.4
drivers/pwm/
├── pwm-sunxi-group.c // Sunxi GROUP PWM support对应的PWM驱动
├── sysfs.c //PWM子系统的文件系统相关文件
├── core.c //PWM子系统的核心文件
3.6 调试接口
可以直接在 linux 内核中调试 pwm 模块,具体如下: 进入/sys/class/pwm 目录,该目录是 linux 内核为 pwm 子系统提供的类目录,遍历该目录:
/sys/class/pwm # ls
pwmchip0
可以看到,上述 pwmchip0 就是我们注册的 pwm 控制器,进入该目录,然后遍历该目录:
/sys/class/pwm # cd pwmchip0/ /sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0 # ls device export npwm subsystem uevent unexport
其中 npwm 文件储存了该 pwm 控制器的 pwm 个数,而 export 和 unexport 是导出和删除某 个 pwm 设备的文件,下面演示导出 pwm1。
/sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0 # cat npwm 2 /sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0 # echo 1 > export /sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0 # ls device export npwm pwm1 subsystem uevent unexport
可以看到目录中多出 pwm1 目录,进入该目录,遍历:
/sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0 # cd pwm1/ /sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0/pwm1 # ls capture duty_cycle enable period polarity uevent
该目录中,enable 是使能 pwm,duty_cycle 是占空比,period 是周期,polarity 是极性,可 以配置相关的 pwm 并且使能:
/sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0/pwm1 # echo 1000000000 > period /sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0/pwm1 # echo 500000000 > duty_cycle /sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0/pwm1 # echo normal > polarity /sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0/pwm1 # echo 1 > enable
如果相关引脚接上了示波器等,可以看到波形。最后返回上层目录,删除该 pwm 设备:
/sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0/pwm1 # cd .. /sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0 # ls device export npwm pwm1 subsystem uevent unexport /sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0 # echo 1 > unexport /sys/devices/platform/soc/1c23400.pwm/pwm/pwmchip0 # ls device export npwm subsystem uevent unexport
-
内核
+关注
关注
3文章
1385浏览量
40475 -
PWM
+关注
关注
114文章
5204浏览量
215207 -
Linux
+关注
关注
87文章
11356浏览量
210791 -
开发
+关注
关注
0文章
370浏览量
40968
发布评论请先 登录
相关推荐
Rockchip Linux SDK uboot logo开发指南




【北京迅为】itop-龙芯2k1000开发指南Linux基础入门vim 编辑器





 工商网监
工商网监
评论