 Linux MIPI CSI开发指南
Linux MIPI CSI开发指南
Linux MIPI CSI 开发指南
1 前言
1.1 文档简介
介绍 VIN(video input)驱动配置,API 接口和上层使用方法。
1.2 目标读者
camera 驱动开发、维护人员和应用开发人员。
1.3 适用范围
表 1-1: 适用产品列表
| 内核版本 | 驱动文件 |
|---|---|
| Linux-4.9 | drivers/media/platform/sunxi_vin/*.c |
| Linux-5.4 | drivers/media/platform/sunxi_vin/*.c |
2 模块介绍
2.1 模块功能介绍
Video input 主要由接口部分(CSI/MIPI)和图像处理单元(ISP/VIPP)组成;
CSI/MIPI 部分主要实现视频数据的捕捉;
ISP 实现 sensor raw data 数据的处理,包括 lens 补偿、去坏点、gain、gamma、de-mosaic、de-noise、color matrix 等以及一些 3A 的统计;
VIPP 能对将图进行缩小、和打水印处理。VIPP 支持 bayer raw data 经过 ISP 处理后再缩小,也支持对一般的 YUV 格式的 sensor 图像直接缩小。
2.2 相关术语介绍
表 2-1: 软件术语
| 相关术语 | 解释说明 |
|---|---|
| ISP | Image Signal Processor 图像信号处理 |
| VIPP | Video Input Post Processor 图像输入后处理 |
| MIPI | Mobile Industry Processor Interface 移动工业处理接口 |
| CCI | Camera Control Interface 摄像头控制接口 |
| TDM | Time division multiplexing ISP 时分复用 |
| MCLK | Master clock(From AP to camera)摄像头主时钟 |
| PCLK | Pixel clock(From camera to AP,Sampling clock for data-bus)像素时钟 |
| YUV | Color Presentation(Y for luminance,U&V for Chrominance)图像数据格式 |
2.3 驱动框架介绍
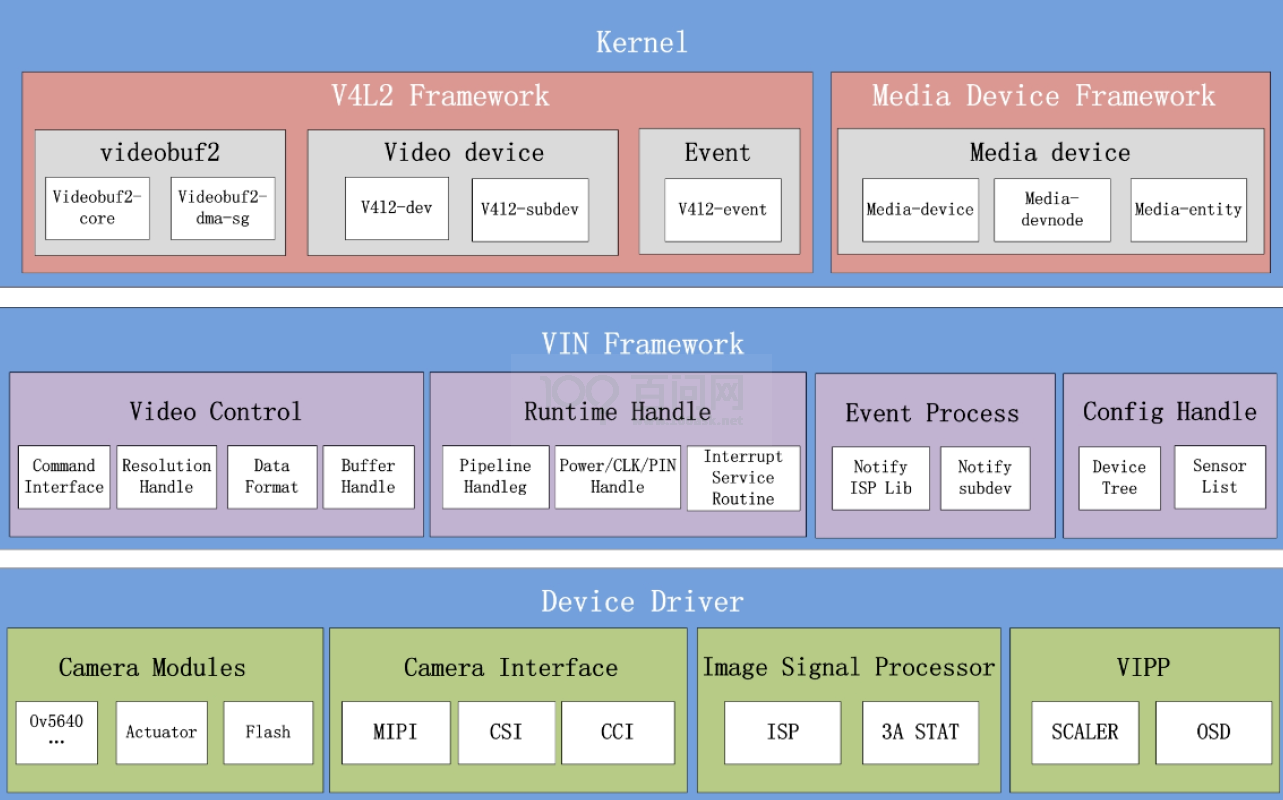
图 2-1: 驱动框图
VIN 驱动可以分为 Kernel 层、Video Input Framework、Device Driver 层。
2.3.1 Kernel 层
V4l2 Framework;
Linux 内核视频驱动第二版(Video for Linux Two );
3) 适用于收音机、视频编解码、视频捕获以及视频输出设备驱动;
4) 提供/dev/videoX 节点,应用通过该节点进行相应视频流和控制操作;
Media Device Framework;
Linux 多媒体设备框架;
7) 适用于管理设备拓扑结构;
8) 提供/dev/mediaX 节点,通过该节点应用可以获取媒体设备拓扑结构,并能够通过 API 控制子设备间数据流向。
2.3.2 Video Input Framework 层
Video Control : 视频命令处理(分辨率协商,数据格式处理,Buffer 管理等);
Runtime Handle : 运行时管理(Pipeline 管理,系统资源管理,中断调度等);
Event Process : 事件管理(如上层调用,中断等事件的接收与分发);
Config Handle : 配置管理(如硬件拓扑结构,模组自适应列表等)。
2.3.3 Device Driver 层
Camera Modules : 模组驱动(图像传感器,对焦电机,闪光灯等驱动);
Camera Interfac : 接口驱动(MIPI、Sub-Lvds 、HiSpi、Bt656、Bt601、Bt1120、DC等);
Image Signal Processor : 图像处理器驱动(基本处理模块驱动,3A 统计驱动);
Video Input Post Processor : 视频输入后处理(Scaler,OSD 等)。
2.4 模块配置介绍
2.4.1 kernel menuconfig 配置
首先,进入 Device Drivers,选择 Multimedia support ,然后依次打开 Cameras/video grabbers support 、Media Controller support 和 SUNXI platform devices, 如下图所示。
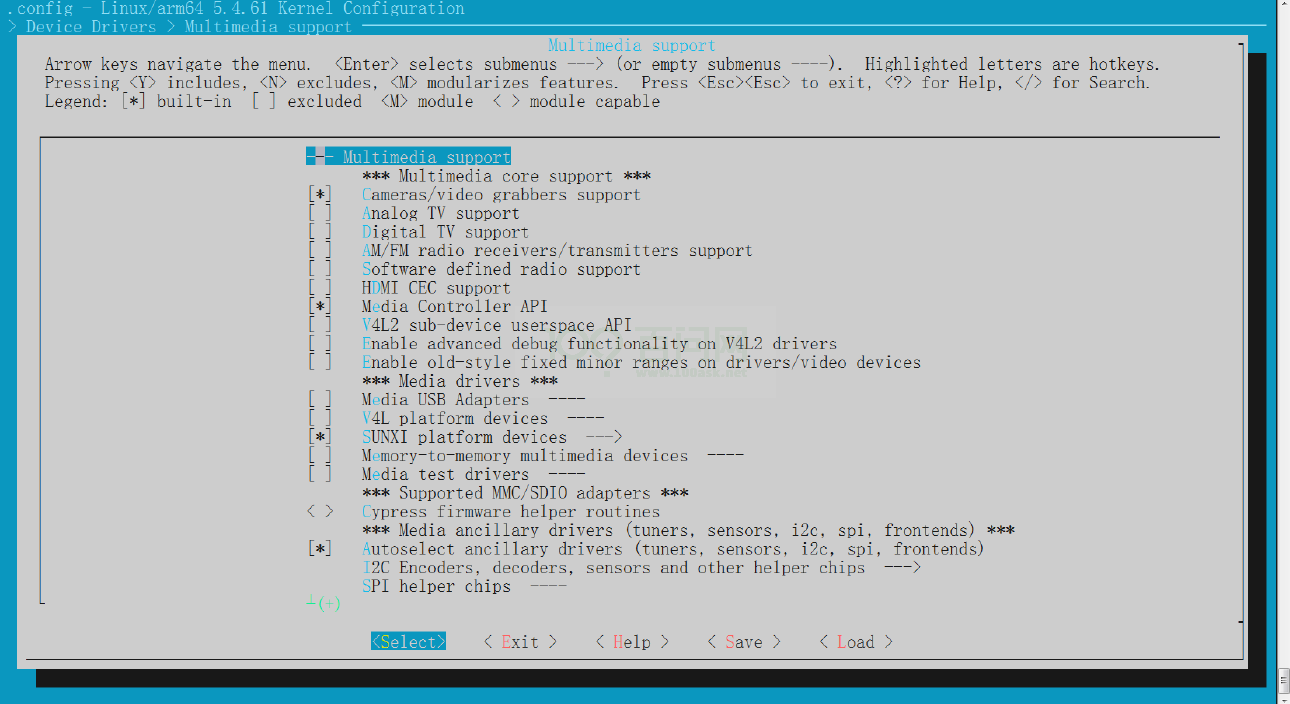
图 2-2: Device Drivers 选项配置
其次,进入 SUNXI platform devices,选择 sunxi video input (camera csi/mipi isp vipp)driver 和 v4l2 new driver for SUNXI,如下图所示。
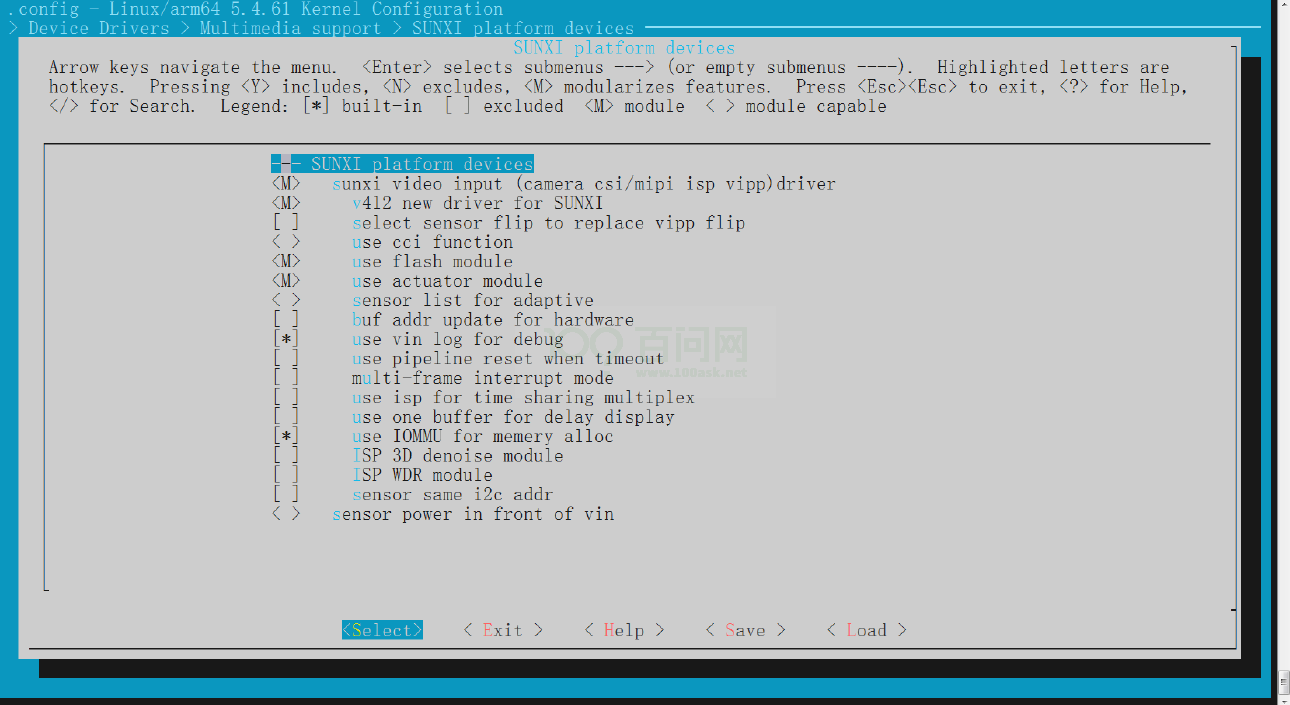
图 2-3: Device Drivers 选项配置
最后,sunxi video input (camera csi/mipi isp vipp)driver 目录下的其他选项需要根据实际产品需求进行开关,如:使用闪光灯、对焦马达、打开 vin log、使用 IOMMU 如下图所示。
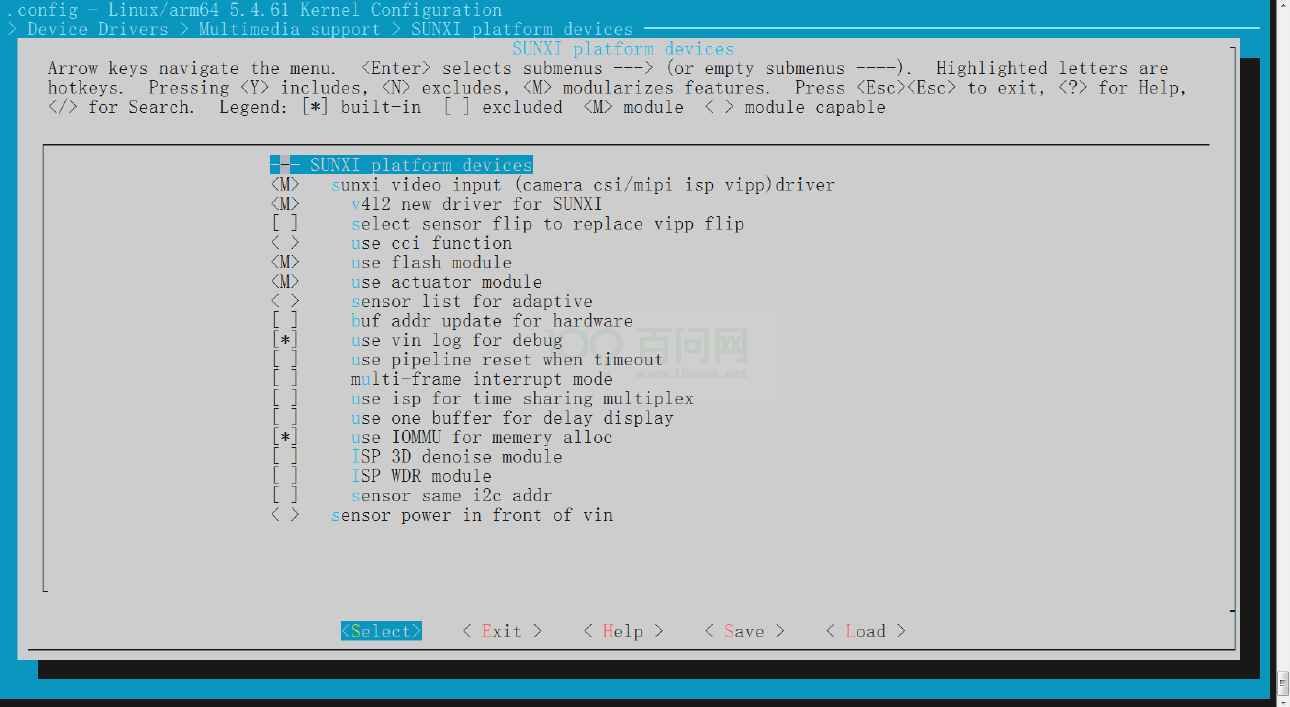
图 2-4: Device Drivers 选项配置
2.4.2 Device Tree 配置说明
• 设备树文件的配置是该 SoC 所有方案的通用配置,对于 ARM64 CPU 而言,设备树的路径为:kernel/{KERNEL_VERSION}/arch/arm64/boot/dts/sunxi/sun*.dtsi。
• 设备树文件的配置是该 SoC 所有方案的通用配置,对于 ARM32 CPU 而言,设备树的路径为:kernel/{KERNEL_VERSION}/arch/arm/boot/dts/sun*.dtsi。
• 板级设备树 (board.dts) 路径:
/device/config/chips/{IC}/configs/{BOARD}/KERNEL_VERSION/board.dts。
在 sun.dtsi 文件中,配置了该 SoC 的 CSI 控制器的通用配置信息,一般不建议修改,由 CSI 驱动维护者维护,如果需要修改配置请修改板级设备树 board.dts,板级设备树里面的内容会覆盖sun.dtsi 对应的信息。
• vind 配置
&vind0 {
vind0_clk = <336000000>;
vind0_isp = <300000000>;
status = "okay";
tdm0:tdm@0 {
work_mode = <0>;
};
isp00:isp@0 {
work_mode = <0>;
};
scaler00:scaler@0 {
work_mode = <0>;
};
scaler10:scaler@4 {
work_mode = <0>;
};
scaler20:scaler@8 {
work_mode = <0>;
};
scaler30:scaler@12 {
work_mode = <0>;
};
actuator0:actuator@0 {
device_type = "actuator0";
actuator0_name = "ad5820_act";
actuator0_slave = <0x18>;
actuator0_af_pwdn = <>;
actuator0_afvdd = "afvcc-csi";
actuator0_afvdd_vol = <2800000>;
status = "disabled";
};
flash0:flash@0 {
device_type = "flash0";
flash0_type = <2>;
flash0_en = <>;
flash0_mode = <>;
flash0_flvdd = "";
flash0_flvdd_vol = <>;
status = "disabled";
};
sensor0:sensor@0 {
device_type = "sensor0";
sensor0_mname = "gc2053_mipi";
sensor0_twi_cci_id = <1>;
sensor0_twi_addr = <0x6e>;
sensor0_mclk_id = <0>;
sensor0_pos = "rear";
sensor0_isp_used = <1>;
sensor0_fmt = <1>;
sensor0_stby_mode = <0>;
sensor0_vflip = <0>;
sensor0_hflip = <0>;
sensor0_iovdd-supply = <®_aldo2>;
sensor0_iovdd_vol = <1800000>;
sensor0_avdd-supply = <®_bldo2>;
sensor0_avdd_vol = <2800000>;
sensor0_dvdd-supply = <®_dldo2>;
sensor0_dvdd_vol = <1200000>;
sensor0_power_en = <>;
sensor0_reset = <&pio PA 18 1 0 1 0>;
sensor0_pwdn = <&pio PA 19 1 0 1 0>;
sensor0_sm_hs = <>;
sensor0_sm_vs = <>;
flash_handle = <&flash0>;
act_handle = <&actuator0>;
status = "okay";
};
sensor1:sensor@1 {
device_type = "sensor1";
sensor1_mname = "imx386_mipi_2";
sensor1_twi_cci_id = <0>;
sensor1_twi_addr = <0x20>;
sensor1_mclk_id = <1>;
sensor1_pos = "front";
sensor1_isp_used = <1>;
sensor1_fmt = <1>;
sensor1_stby_mode = <0>;
sensor1_vflip = <0>;
sensor1_hflip = <0>;
sensor1_iovdd-supply = <®_aldo2>;
sensor1_iovdd_vol = <1800000>;
sensor1_avdd-supply = <®_bldo2>;
sensor1_avdd_vol = <2800000>;
sensor1_dvdd-supply = <®_dldo2>;
sensor1_dvdd_vol = <1200000>;
sensor1_power_en = <>;
sensor1_reset = <&pio PA 20 1 0 1 0>;
sensor1_pwdn = <&pio PA 21 1 0 1 0>;
sensor1_sm_hs = <>;
sensor1_sm_vs = <>;
flash_handle = <>;
act_handle = <>;
status = "okay";
};
vinc00:vinc@0 {
vinc0_csi_sel = <0>;
vinc0_mipi_sel = <0>;
vinc0_isp_sel = <0>;
vinc0_isp_tx_ch = <0>;
vinc0_tdm_rx_sel = <0>;
vinc0_rear_sensor_sel = <0>;
vinc0_front_sensor_sel = <0>;
vinc0_sensor_list = <0>;
work_mode = <0x0>;
status = "okay";
};
vinc01:vinc@1 {
vinc1_csi_sel = <2>;
vinc1_mipi_sel = <0xff>;
vinc1_isp_sel = <1>;
vinc1_isp_tx_ch = <1>;
vinc1_tdm_rx_sel = <1>;
vinc1_rear_sensor_sel = <0>;
vinc1_front_sensor_sel = <0>;
vinc1_sensor_list = <0>;
status = "disabled";
};
vinc02:vinc@2 {
vinc2_csi_sel = <2>;
vinc2_mipi_sel = <0xff>;
vinc2_isp_sel = <2>;
vinc2_isp_tx_ch = <2>;
vinc2_tdm_rx_sel = <2>;
vinc2_rear_sensor_sel = <0>;
vinc2_front_sensor_sel = <0>;
vinc2_sensor_list = <0>;
status = "disabled";
};
vinc03:vinc@3 {
vinc3_csi_sel = <0>;
vinc3_mipi_sel = <0xff>;
vinc3_isp_sel = <0>;
vinc3_isp_tx_ch = <0>;
vinc3_tdm_rx_sel = <0>;
vinc3_rear_sensor_sel = <1>;
vinc3_front_sensor_sel = <1>;
vinc3_sensor_list = <0>;
status = "disabled";
};
…………
};
其中:
status 是 vin 驱动的总开关,对应的是 media 设备,使用 vin 时必须设为 okay;
vind0_clk 是 vin 模块的时钟,实际使用时可以根据 sensor 的帧率和分辨率来设置;
vind0_isp 是 isp 模块时钟,实际使用时可以根据 sensor 的帧率和分辨率来设置;
vind0_clk 表示 csi clk,计算公式:帧率 x (vts)x (hts)x 1(wdr 则为 2) / 8 / 1(双 pixel则为 2) / 1000000,向上取整,单位为 MH;vind0_isp 表示 isp clk,计算公式:帧率 x 宽 x 高 x 1.2 / 1000000,向上取整,单位为 MH;其中有些 ic 是没有 isp_clk,csi_clk 和isp_clk 都是设置在 vind0_clk。那么 vind0_clk 设置为 csi_clk 和 isp_clk 中最大的数值;
work_mode: 0:online mode 1:offline mode, 根据使用需求配置;
flash0_type: 0:FLASH_RELATING, 1:FLASH_EN_INDEPEND, 2:FLASH_POWER
flash0_en: flash enable gpio, type = 0 of 1
flash0_mode: flash mode gpio, type = 0 of 1
flash0_flvdd: flash module io power handle string, pmu power supply, type = 2
flash0_flvdd_vol: flash module io power voltage, pmu power supply, type = 2
status: 是否使用 flash, disable 代表关,okay 代表开
actuator0_name: vcm name
actuator0_slave: vcm iic slave address
actuator0_af_pwdn: vcm power down gpio
actuator0_afvdd: vcm power handle string, pmu power supply
actuator0_afvdd_vol: vcm power voltage, pmu power supply
status: vcm if used, disable 代表关,okay 代表开
device_type: sensor type sensor0_mname: sensor name
sensor0_twi_cci_id:sensor 所使用的 twi 或者 cci 的 id。
sensor0_twi_addr:sensor 的 twi 地址
sensor0_mclk_id:sensor 所使用的 mclk 的 id。
sensor0_pos:sensor 的位置,前置还是后置,主要用在平板上。
sensor0_isp_used: not use isp 1:use isp
sensor0_fmt: 0:yuv 1:bayer raw rgb
sensor0_stby_mode: not shut down power at standby 1:shut down power at standby
sensor0_vflip: flip in vertical direction 0:disable 1:enable
sensor0_hflip: flip in horizontal direction 0:disable 1:enable
sensor0_iovdd-supply: camera module io power handle string, pmu power supply
sensor0_iovdd_vol: camera module io power voltage, pmu power supply
sensor0_avdd-supply: camera module analog power handle string, pmu power supply
sensor0_avdd_vol: camera module analog power voltage, pmu power supply
sensor0_dvdd-supply: camera module core power handle string, pmu power supply
sensor0_dvdd_vol: camera module core power voltage, pmu power supply
sensor0_power_en: camera module power enable gpio
sensor0_reset: camera module reset gpio
sensor0_pwdn: camera module pwdn gpio sensor0_sm_hs: camera module sm_hs
gpio sensor0_sm_vs: camera module sm_vs gpio status: open or close sensor de
vice flash/actautor/sensor 节点用于对应的外设的开关和配置。这些节点的配置一般需要参
考对应方案的原理图和外设的 data sheet 来完成。
vinc0_csi_sel:表示该 pipeline 上 parser 的 id,必须配置,且为有效 id。
vinc0_mipi_sel:表示该 pipeline 上 mipi(sublvds/hispi)的 id,不使用时配置为 0xff。
vinc0_isp_sel:表示该 pipeline 上 isp 的 id,必须配置,当 isp 为空时,这个 isp 只是表示路由不做 isp 的效果处理。
vinc0_isp_tx_ch 表示该 pipeline 上 isp 的 ch,必须配置,默认为 0。当 sensor 是 bt656 多通道或者 WDR 出 RAW 时,该 ch 可以配置 0~3 的值。
vinc0_tdm_rx_sel: 表示该 pipeline 上 tdm rx 的 ch,必须配置,默认为 0。当不使用 tdm功能时,配置为 0xff;
vinc0_rear_sensor_sel 表示该 pipeline 上使用的后置 sensor 的 id。
vinc0_front_sensor_sel 表示该 pipeline 上使用的前置 sensor 的 id。
vinc0_sensor_list 表示是否使用 sensor_list 来时适配不同的模组,1 表示使用,0 表示不使用。
work_mode: 0:online mode 1:offline mode, 根据使用需求配置;只有 vinc0/4/8/12 可以配置。
status:vipp 的使能开关,okay or disable。
2.5 源码模块结构
驱动路径位于 drivers/media/platform/sunxi-vin 目录。
sunxi-vin:.
├── Kconfig
├── Makefile
├── modules
│ ├── actuator
│ │ ├── actuator.c ;vcm driver的一般行为
│ │ ├── actuator.h ;vcm driver的头文件
│ │ ├── ad5820_act.c ;具体vcm driver型号实现
│ │ ├── an41908a_act.c ;具体vcm driver型号实现
│ │ ├── dw9714_act.c ;具体vcm driver型号实现
│ │ ├── Makefile ;编译文件
│ ├── flash
│ │ ├── flash.c ;led补光灯控制实现
│ │ ├── flash.h ;led补光灯驱动头文件
│ └── sensor
│ ├── ar0238.c ;具体的sensor驱动
│ ├── camera_cfg.h ;camera ioctl扩展命令头文件
│ ├── camera.h ;camera公用结构体头文件
│ ├── gc030a_mipi.c ;具体的sensor驱动
│ ├── gc0310_mipi.c ;具体的sensor驱动
│ ├── gc5024_mipi.c ;具体的sensor驱动
│ ├── imx179_mipi.c ;具体的sensor驱动
│ ├── imx214.c ;具体的sensor驱动
│ ├── imx219.c ;具体的sensor驱动
│ ├── imx317_mipi.c ;具体的sensor驱动
│ ├── Makefile ;驱动的编译文件
│ ├── nvp6134 ;具体的dvp sensor驱动
│ │ ├── acp.c
│ │ ├── acp_firmup.c
│ │ ├── acp_firmup.h
│ │ ├── acp.h
│ │ ├── common.h
│ │ ├── csi_dev_nvp6134.c
│ │ ├── csi_dev_nvp6134.h
│ │ ├── eq.c
│ │ ├── eq_common.c
│ │ ├── eq_common.h
│ │ ├── eq.h
│ │ ├── eq_recovery.c
│ │ ├── eq_recovery.h
│ │ ├── Makefile
│ │ ├── nvp6134c.c ;具体的sensor驱动实现
│ │ ├── type.h
│ │ ├── video.c
│ │ └── video.h
│ ├── nvp6158 ;具体的dvp sensor驱动
│ │ ├── audio.c ;音频部分实现
│ │ ├── audio.h ;音频部分头文件接口
│ │ ├── coax_protocol.c
│ │ ├── coax_protocol.h
│ │ ├── coax_table.h
│ │ ├── common.h
│ │ ├── Makefile
│ │ ├── modules.builtin
│ │ ├── modules.order
│ │ ├── motion.c
│ │ ├── motion.h
│ │ ├── nvp6158c.c ;具体的sensor驱动实现
│ │ ├── nvp6158_drv.c
│ │ ├── nvp6158_drv.h
│ │ ├── nvp6168_eq_table.h
│ │ ├── video_auto_detect.c
│ │ ├── video_auto_detect.h
│ │ ├── video.c
│ │ ├── video_eq.c
│ │ ├── video_eq.h
│ │ ├── video_eq_table.h
│ │ ├── video.h
│ ├── rn6854m_mipi.c ;具体的sensor驱动实现
│ ├── sensor-compat-ioctl32.c
│ ├── sensor_helper.c ;驱动函数接口的实现
│ ├── sensor_helper.h ;驱动函数接口的定义
├── modules.builtin
├── modules.order
├── platform
│ ├── platform_cfg.h ;vin平台配置文件
│ ├── sun50iw10p1_vin_cfg.h ;不同平台配置文件
│ ├── sun50iw3p1_vin_cfg.h ;不同平台配置文件
│ ├── sun50iw6p1_vin_cfg.h ;不同平台配置文件
│ ├── sun50iw9p1_vin_cfg.h ;不同平台配置文件
│ ├── sun8iw12p1_vin_cfg.h ;不同平台配置文件
│ ├── sun8iw15p1_vin_cfg.h ;不同平台配置文件
│ ├── sun8iw16p1_vin_cfg.h ;不同平台配置文件
│ └── sun8iw19p1_vin_cfg.h ;不同平台配置文件
├── top_reg.c
├── top_reg.h
├── top_reg_i.h
├── top_reg.o
├── utility
│ ├── bsp_common.c
│ ├── bsp_common.h
│ ├── bsp_common.o
│ ├── cfg_op.c ;读取ini文件的实现函数
│ ├── cfg_op.h ;读取ini文件的实现函数
│ ├── config.c ;sensor电压、通道选择、i2c地址等信息读取函数
│ ├── config.h ;sensor电压、通道选择、i2c地址等信息读取函数头文件
│ ├── vin_io.h ;vin模块寄存器操作头文件
│ ├── vin_os.c
│ ├── vin_os.h
│ ├── vin_supply.c
│ ├── vin_supply.h
├── vin.c
├── vin-cci
│ ├── bsp_cci.c ;底层cci bsp函数
│ ├── bsp_cci.h ;底层cci bsp函数头文件
│ ├── cci_helper.c ;cci 帮助函数,供sensor驱动调用
│ ├── cci_helper.h ;cci 帮助函数头文件
│ ├── csi_cci_reg.c ;cci硬件底层实现
│ ├── csi_cci_reg.h ;cci硬件底层实现头文件
│ ├── csi_cci_reg_i.h ;cci 寄存器资源头文件
│ ├── Kconfig
│ ├── sunxi_cci.c ;cci 平台驱动源文件
│ ├── sunxi_cci.h ;cci 平台驱动头文件
├── vin-csi
│ ├── parser_reg.c ;CSI控制函数
│ ├── parser_reg.h ;CSI控制函数头文件
│ ├── parser_reg_i.h ;CSI 寄存器值
│ ├── sunxi_csi.c ;csi 子模块驱动原文件
│ ├── sunxi_csi.h ;csi 子模块驱动头文件
├── vin.h
├── vin-isp
│ ├── isp500
│ │ ├── isp500_reg_cfg.c
│ │ ├── isp500_reg_cfg.h
│ │ ├── isp500_reg_cfg.o
│ │ └── isp500_reg.h
│ ├── isp520
│ │ ├── isp520_reg_cfg.c
│ │ ├── isp520_reg_cfg.h
│ │ └── isp520_reg.h
│ ├── isp521
│ │ ├── isp521_reg_cfg.c
│ │ ├── isp521_reg_cfg.h
│ │ └── isp521_reg.h
│ ├── isp522
│ │ ├── isp522_reg_cfg.c
│ │ ├── isp522_reg_cfg.h
│ │ └── isp522_reg.h
│ ├── isp_default_tbl.h
│ ├── sunxi_isp.c
│ ├── sunxi_isp.h
│ └── sunxi_isp.o
├── vin-mipi
│ ├── bsp_mipi_csi.c ;底层mipi bsp函数
│ ├── bsp_mipi_csi.h ;底层mipi bsp函数头文件
│ ├── bsp_mipi_csi_null.c ;底层mipi bsp空函数
│ ├── bsp_mipi_csi_v1.c ;底层mipi bsp函数--v1
│ ├── combo_common.h
│ ├── combo_csi
│ │ ├── combo_csi_reg.c
│ │ ├── combo_csi_reg.h
│ │ └── combo_csi_reg_i.h
│ ├── combo_rx
│ │ ├── combo_rx_reg.c
│ │ ├── combo_rx_reg.h
│ │ ├── combo_rx_reg_i.h
│ │ └── combo_rx_reg_null.c
│ ├── dphy
│ │ ├── dphy.h ;mipi dphy头文件
│ │ ├── dphy_reg.c ;mipi dphy底层实现函数
│ │ ├── dphy_reg.h ;mipi dphy底层实现函数头文件
│ │ └── dphy_reg_i.h ;mipi dphy 寄存器资源头文件
│ ├── protocol
│ │ ├── protocol.h ;mipi协议层头文件
│ │ ├── protocol_reg.c ;mipi协议层底层实现
│ │ ├── protocol_reg.h ;mipi协议层底层实现头文件
│ │ └── protocol_reg_i.h
│ ├── protocol.h
│ ├── sunxi_mipi.c
│ ├── sunxi_mipi.h
├── vin-stat
│ ├── vin_h3a.c ;3A控制接口函数
│ ├── vin_h3a.h ;3A控制接口函数头文件
├── vin-tdm
│ ├── tdm_reg.c ;TDM寄存器控制函数
│ ├── tdm_reg.h
│ ├── tdm_reg_i.h
│ ├── vin_tdm.c
│ └── vin_tdm.h
├── vin_test
│ ├── mplane_image
│ │ ├── csi_test_mplane.c ;camera抓图测试用例
│ │ └── Makefile ;测试用例编译文件
│ ├── sunxi_camera_v2.h
│ └── sunxi_display2.h
├── vin-video
│ ├── dma_reg.c ;csi dma寄存器控制函数
│ ├── dma_reg.h ;csi dma寄存器控制函数
│ ├── dma_reg_i.h ;csi dma 寄存器值定义头文件
│ ├── vin_core.c ;vin模块核心
│ ├── vin_core.h ;vin模块核心头文件
│ ├── vin_video.c ; 数据格式处理、pipe通道选择、Buffer管理等函数
│ ├── vin_video.h ;数据格式处理、pipe通道选择、Buffer管理等函数头文件
└── vin-vipp
├── sunxi_scaler.c ;图像压缩处理函数
├── sunxi_scaler.h ;图像压缩处理函数头文件
├── vipp_reg.c ;vipp寄存器控制函数
├── vipp_reg.h ;vipp寄存器控制函数头文件
├── vipp_reg_i.h ;vipp寄存器具体描述头文件
3 V4L2 接口描述
3.1 VIDIOC_QUERYCAP
3.1.1 Parameters
Capability of csi driver(struct v4l2_capability * capability)
struct v4l2_capability {
__u8 driver[16]; /* i.e. "bttv" */
__u8 card[32]; /* i.e. "Hauppauge WinTV" */
__u8 bus_info[32]; /* "PCI:" + pci_name(pci_dev) */
__u32 version; /* should use KERNEL_VERSION() */
__u32 capabilities; /* Device capabilities */
__u32 reserved[4];
};
3.1.2 Returns
Success:0; Fail: Failure Number
3.1.3 Description
获取驱动的名称、版本、支持的 capabilities 等,如 V4L2_CAP_STREAMIN,V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE 等。
3.2 VIDIOC_ENUM_INPUT
3.2.1 Parameters
input(struct v4l2_input *inp)
struct v4l2_input {
__u32 index; /* Which input */
__u8 name[32]; /* Label */
__u32 type; /* Type of input */
__u32 audioset; /* Associated audios (bitfield) */
__u32 tuner; /* Associated tuner */
v4l2_std_id std;
__u32 status;
__u32 capabilities;
__u32 reserved[3];
};
3.2.2 Returns
Success:0; Fail: Failure Number
3.2.3 Description
获取驱动支持的 input index。目前驱动只支持 input index = 0 或 index = 1。
Index = 0 表示 primary csi device
Index = 1 表示 secondary csi device
应用输入 index 参数,驱动返回 type。对于 VIN 设备来说,type 为 V4L2_INPUT_TYPE_CAMERA。
3.3 VIDIOC_S_INPUT
3.3.1 Parameters
input(struct v4l2_input *inp)
The same as VIDIOC_ENUM_INPUT
3.3.2 Returns
Success:0; Fail: Failure Number
3.3.3 Description
通过 inp.index 设置当前要访问的 csi device 为 primary device 还是 secondary device。
Index = 0 (双摄像头配置中,一般对应后置摄像头。若只有一个摄像头设备,则 index 固定为0)
Index = 1(双摄像头配置中,一般对应前置摄像头)
调用该接口后,实际上会对 csi device 进行初始化工作。
在 A133 平台:Index 在 video0、1 时固定要设为 0;在 video2、3 要设为 1。
3.4 VIDIOC_G_INPUT
3.4.1 Parameters
input(struct v4l2_input *inp)
The same as VIDIOC_ENUM_INPUT
3.4.2 Returns
Success:0; Fail: Failure Number
3.4.3 Description
获取 inp.index,判断当前设置的 csi device 为 primary device 还是 secondary device。
Index = 0 (双摄像头配置中,一般对应后置摄像头。若只有一个摄像头设备,则 index 固定为0)
Index = 1(双摄像头配置中,一般对应前置摄像头)
3.5 VIDIOC_S_PARM
3.5.1 Parameters
Parameter(struct v4l2_streamparm *parms)
struct v4l2_streamparm {
enum v4l2_buf_type type;
union {
struct v4l2_captureparm capture;
struct v4l2_outputparm output;
__u8 raw_data[200]; /* user-defined */
} parm;
};
struct v4l2_captureparm {
__u32 capability; /* Supported modes */
__u32 capturemode; /* Current mode */
struct v4l2_fract timeperframe; /* Time per frame in .1us units */
__u32 extendedmode; /* Driver-specific extensions */
__u32 readbuffers; /* # of buffers for read */
__u32 reserved[4];
};
3.5.2 Returns
Success:0; Fail: Failure Number
3.5.3 Description
CSI 作为输入设备,只关注 parms.type 和 parms. capture。
应用使用时,parms.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
其中通过设定 parms->capture.capturemode(V4L2_MODE_VIDEO 或 V4L2_MODE_IMAGE),
实现视频或图片的采集。通过设定 parms->capture.timeperframe,可以设置帧率。
3.6 VIDIOC_G_PARM
3.6.1 Parameters
Parameter(struct v4l2_streamparm *parms)
The same as VIDIOC_S_PARM
3.6.2 Returns
Success:0; Fail: Failure Number
3.6.3 Description
应用使用时,parms.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
通过 parms->capture.capturemode 返回当前是 V4L2_MODE_VIDEO 或 V4L2_MODE_IMAGE;
通过 parms->capture.timeperframe, 返回当前设置的帧率。
3.7 VIDIOC_ENUM_FMT
3.7.1 Parameters
V4L2 format(struct v4l2_fmtdesc * fmtdesc) struct v4l2_fmtdesc { __u32 index; /* Format number */ enum v4l2_buf_type type; /* buffer type */ __u32 flags; __u8 description[32]; /* Description string */ __u32 pixelformat; /* Format fourcc */ __u32 reserved[4]; };
3.7.2 Returns
Success:0; Fail: Failure Number
3.7.3 Description
获取驱动支持的 V4L2 格式。
应用输入 type,index 参数,驱动返回 pixelformat 。对于 VIN 设备来说,type 为V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE。
3.8 VIDIOC_TRY_FMT
3.8.1 Parameters
Video type, format and size(struct v4l2_format * fmt) struct v4l2_format { enum v4l2_buf_type type; union { struct v4l2_pix_format pix; struct v4l2_pix_format_mplane pix_mp; struct v4l2_window win; struct v4l2_vbi_format vbi; struct v4l2_sliced_vbi_format sliced; __u8 raw_data[200]; } fmt; }; struct v4l2_pix_format { __u32 width; __u32 height; __u32 pixelformat; enum v4l2_field field; __u32 bytesperline; /* for padding, zero if unused */ __u32 sizeimage; enum v4l2_colorspace colorspace; __u32 priv; /* private data, depends on pixelformat */ };
3.8.2 Returns
Success:0; Fail: Failure Number
3.8.3 Description
根据捕捉视频的类型、格式和大小,判断模式、格式等是否被驱动支持。不会改变任何硬件设置。
对于 VIN 设备,type 为 V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE。使用 struct v4l2_pix_format_mplane 进行参数传递。
应用程序输入 struct v4l2_pix_format_mplane 结构体里面的 width、height、pixelformat、field 等参数,驱动返回最接近的 width、height;若 pixelformat、field 不支持,则默认选择驱动支持的第一种格式。
3.9 VIDIOC_S_FMT
3.9.1 Parameters
Video type, format and size(struct v4l2_format * fmt) The same as VIDIOC_TRY_FMT
3.9.2 Returns
Success:0; Fail: Failure Number
3.9.3 Description
设置捕捉视频的类型、格式和大小,设置之前会调用 VIDIOC_TRY_FMT。
对于 VIN 设备,type 为 V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE。使用 struct v4l2_pix_format_mplane 进行参数传递。应用程序输入 width、height、pixelformat、field 等,驱动返回最接近的 width、height; 若 pixelformat、field 不支持,则默认选择驱动支持的第一种格式。
应用程序应该以驱动返回的 width、height、pixelformat、field 等作为后续使用传递的参数。对于 OSD 设备,type 为 V4L2_BUF_TYPE_VIDEO_OVERLAY。使用 struct v4l2_window进行参数传递。
应用程序输入水印的个数、窗口位置和大小、bitmap 地址、bitmap 格式以及 global_alpha 等。驱动保存这些参数,并在 VIDIOC_OVERLAY 命令传递使能命令时生效。
3.10 VIDIOC_G_FMT
3.10.1 Parameters
Video type, format and size(struct v4l2_format * fmt) The same as VIDIOC_TRY_FMT
3.10.2 Returns
Success:0; Fail: Failure Number
3.10.3 Description
获取捕捉视频的 width、height、pixelformat、field、bytesperline、sizeimage 等参数。
3.11 VIDIOC_OVERLAY
3.11.1 Parameters
Overlay on/off(unsigned int i)
3.11.2 Returns
Success:0; Fail: Failure Number
3.11.3 Description
传递 1 表示使能,0 表示关闭。设置使能时会更新 osd 参数,使之生效。
3.12 VIDIOC_REQBUFS
3.12.1 Parameters
Buffer type ,count and memory map type(struct v4l2_requestbuffers * req) struct v4l2_requestbuffers { __u32 count; enum v4l2_buf_type type; enum v4l2_memory memory; __u32 reserved[2]; };
3.12.2 Returns
Success:0; Fail: Failure Number
3.12.3 Description
v4l2_requestbuffers 结构中定义了缓存的数量,驱动会据此申请对应数量的视频缓存。多个缓存可以用于建立 FIFO,来提高视频采集的效率。这些 buffer 通过内核申请,申请后需要通过 mmap 方法,映射到 User 空间。
Count:定义需要申请的 video buffer 数量;
Type:对于 VIN 设备,为 V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
Memory:目前支持 V4L2_MEMORY_MMAP、V4L2_MEMORY_USERPTR、V4L2_MEMORY_DMABUF 方式。
应用程序传递上述三个参数,驱动会根据 VIDIOC_S_FMT 设置的格式计算供需要 buffer 的大小,并返回 count 数量。
3.13 VIDIOC_QUERYBUF
3.13.1 Parameters
Buffer type ,index and memory map type(struct v4l2_buffer *buf) struct v4l2_buffer { __u32 index; enum v4l2_buf_type type; __u32 bytesused; __u32 flags; enum v4l2_field field; struct timeval timestamp; struct v4l2_timecode timecode; __u32 sequence; /* memory location */ enum v4l2_memory memory; union { __u32 offset; unsigned long userptr; struct v4l2_plane *planes; } m; __u32 length; __u32 input; __u32 reserved; };
3.13.2 Returns
Success:0; Fail: Failure Number
3.13.3 Description
通过 struct v4l2_buffer 结构体的 index,访问对应序号的 buffer,获取到对应 buffer 的缓存信息。主要利用 length 信息及 m.offset 信息来完成 mmap 操作。
3.14 VIDIOC_DQBUF
3.14.1 Parameters
Buffer type ,index and memory map type(struct v4l2_buffer *buf) struct v4l2_buffer is the same as VIDIOC_QUERYBUF
3.14.2 Returns
Success:0; Fail: Failure Number
3.14.3 Description
将 driver 已经填充好数据的 buffer 出列,供应用使用。
应用程序根据 index 来识别 buffer,此时 m.offset 表示 buffer 对应的物理地址。
3.15 VIDIOC_QBUF
3.15.1 Parameters
Buffer type ,index and memory map type(struct v4l2_buffer *buf)
3.15.2 Returns
Success:0; Fail: Failure Number
3.15.3 Description
将 User 空间已经处理过的 buffer,重新入队,移交给 driver,等待填充数据。
应用程序根据 index 来识别 buffer。
3.16 VIDIOC_STREAMON
3.16.1 Parameters
Buffer type(enum v4l2_buf_type *type)
3.16.2 Returns
Success:0; Fail: Failure Number
3.16.3 Description
此处的 buffer type 为 V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE。运行此 IOCTL, 将 buffer 队列中所有 buffer 入队,并开启 CSIC DMA 硬件中断,每次中断便表示完成一帧 buffer 数据的填入。
3.17 VIDIOC_STREAMOFF
3.17.1 Parameters
Buffer type(enum v4l2_buf_type *type)
3.17.2 Returns
Success:0; Fail: Failure Number
3.17.3 Description
此处的 buffer type 为 V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE。运行此 IOCTL,停止捕捉视频,将 frame buffer 队列清空,以及 video buffer 释放。
3.18 VIDIOC_QUERYCTRL
3.18.1 Parameters
Control id and value(struct v4l2_queryctrl *qc) struct v4l2_queryctrl { __u32 id; enum v4l2_ctrl_type type; __u8 name[32]; /* Whatever */ __s32 minimum; /* Note signedness */ __s32 maximum; __s32 step; __s32 default_value; __u32 flags; __u32 reserved[2]; };
3.18.2 Returns
Success:0; Fail: Failure Number
3.18.3 Description
应用程序通过 id 参数,驱动返回需要调节参数的 name,minmum,maximum,default_value 以及步进 step。(由 v4l2 conctrols framework 完成)目前可能支持的 id 请参考 VIDIOC_S_CTRL。
3.19 VIDIOC_S_CTRL
3.19.1 Parameters
Control id and value(struct v4l2_queryctrl *qc) The same as VIDIOC_QUERYCTRL
3.19.2 Returns
Success:0; Fail: Failure Number
3.19.3 Description
应用程序通过 id,value 等参数,对 camera 驱动对应的参数进行设置。
驱动内部会先调用 vidioc_queryctrl,判断 id 是否支持,value 是否在 minimum 和 maximum 之间。(由 v4l2 conctrols framework 完成)目前可能支持的 id 和 value 参考附件。
3.20 VIDIOC_G_CTRL
3.20.1 Parameters
Control id and value(struct v4l2_queryctrl *qc) The same as VIDIOC_QUERYCTRL
3.20.2 Returns
Success:0; Fail: Failure Number
3.20.3 Description
应用程序通过 id,驱动返回对应 id 当前设置的 value。
3.21 VIDIOC_ENUM_FRAMESIZES
3.21.1 Parameters
index,type,format(struct v4l2_frmsizeenum) enum v4l2_frmsizetypes { V4L2_FRMSIZE_TYPE_DISCRETE = 1, V4L2_FRMSIZE_TYPE_CONTINUOUS = 2, V4L2_FRMSIZE_TYPE_STEPWISE = 3, }; struct v4l2_frmsize_discrete { __u32 width; /* Frame width [pixel] */ __u32 height; /* Frame height [pixel] */ }; struct v4l2_frmsize_stepwise { __u32 min_width; /* Minimum frame width [pixel] */ __u32 max_width; /* Maximum frame width [pixel] */ __u32 step_width; /* Frame width step size [pixel] */ __u32 min_height; /* Minimum frame height [pixel] */ __u32 max_height; /* Maximum frame height [pixel] */ __u32 step_height; /* Frame height step size [pixel] */ }; struct v4l2_frmsizeenum { __u32 index; /* Frame size number */ __u32 pixel_format; /* Pixel format */ __u32 type; /* Frame size type the device supports. */ union { /* Frame size */ struct v4l2_frmsize_discrete discrete; struct v4l2_frmsize_stepwise stepwise; }; __u32 reserved[2]; /* Reserved space for future use */ };
3.21.2 Returns
Success:0; Fail: Failure Number
3.21.3 Description
根据应用传进来的 index,pixel_format,驱动返回 type,并根据 type 填写 discrete 或 step-wise 的值。Discrete 表示分辨率固定的值;stepwise 表示分辨率有最小值和最大值,并根据step 递增。上层根据返回的 type,做对应不同的操作。
3.22 VIDIOC_ENUM_FRAMEINTERVALS
3.22.1 Parameters
Index,format,size,type(struct v4l2_frmivalenum) enum v4l2_frmivaltypes { V4L2_FRMIVAL_TYPE_DISCRETE = 1, V4L2_FRMIVAL_TYPE_CONTINUOUS = 2, V4L2_FRMIVAL_TYPE_STEPWISE = 3, }; struct v4l2_frmival_stepwise { struct v4l2_fract min; /* Minimum frame interval [s] */ struct v4l2_fract max; /* Maximum frame interval [s] */ struct v4l2_fract step; /* Frame interval step size [s] */ }; struct v4l2_frmivalenum { __u32 index; /* Frame format index */ __u32 pixel_format; /* Pixel format */ __u32 width; /* Frame width */ __u32 height; /* Frame height */ __u32 type; /* Frame interval type the device supports. */ union { /* Frame interval */ struct v4l2_fract discrete; struct v4l2_frmival_stepwise stepwise; }; __u32 reserved[2]; /* Reserved space for future use */ };
3.22.2 Returns
Success:0; Fail: Failure Number
3.22.3 Description
应用程序通过 pixel_format、width、height、驱动返回 type,并根据 type 填写
V4L2_FRMIVAL_TYPE_DISCRETE、V4L2_FRMIVAL_TYPE_CONTINUOUS 或V4L2_FRMIVAL_TYPE_STEPWISE。Discrete 表示支持单一的帧率;stepwise 表示支持步进的帧率。
3.23 VIDIOC_ISP_EXIF_REQ
作用: 得到当前照片的 EXIF 信息,填写到相应的编码域中。目的:对于 raw sensor 尽量填写正规的 EXIF 信息,yuv sensor 该 IOCTRL 也可以使用,不过驱动中填写的也是固定值。相关参数:
struct v4l2_fract { __u32 numerator; __u32 denominator; }; struct isp_exif_attribute { struct v4l2_fract exposure_time; struct v4l2_fract shutter_speed; __u32 aperture; __u32 focal_length; __s32 exposure_bias; __u32 iso_speed; __u32 flash_fire; __u32 brightness; }; struct v4l2_fract exposure_time; 曝光时间:分数类型,例如numerator = 1,denominator = 200,则表示1/200秒的曝光时间。 struct v4l2_fract shutter_speed; 快门速度:分数类型,例如numerator = 1,denominator = 200,则表示1/200秒的快门速度。(实际上和曝光时间数值相同) __u32 aperture; 光圈大小:FNumber,例如aperture = 22,则表示,光圈大小为2.2,即FNumber = 22/10; __u32 focal_length; 焦距:例如focal_length = 1400,则表示焦距为14mm,即FocalLength = 1400/100( mm); __s32 exposure_bias; 曝光补偿:范围 -4~4 __u32 iso_speed; 感光速度:50~3200 __u32 flash_fire; 闪光灯是否开启:flash_fire = 1 表示闪光灯开启,flash_fire = 0 表示闪光灯未开启。 __u32 brightness; 图像亮度:0~255. 使用示例: int V4L2CameraDevice::getExifInfo(struct isp_exif_attribute *exif_attri) { int ret = -1; if (mCameraFd == NULL) { return 0xFF000000; } ret = ioctl(mCameraFd, VIDIOC_ISP_EXIF_REQ, exif_attri); return ret; }
4 模块使用范例
4.1 测试 demo
模块使用的 demo 的代码位于 drivers/media/platform/sunxi-vin/vin_test/mplane_image;此目录下可以直接 make 生成 demo;把 demo 推到机器里面执行便可以获取指定 video 节点的图像。推荐在 pc 上创建 bat 批处理文件,使用 adb 命令完成一系列抓图的动作,bat 内容参考如下,不同机器请注意修改 push 进去的路径:
del .result*.bin adb root adb remount adb shell "mkdir /vendor/extsd/" adb shell "mkdir /vendor/extsd/result" adb shell rm /vendor/extsd/result/*.bin adb push demo路径csi_test_mplane /vendor/extsd/csi_test1 adb shell chmod 777 /vendor/extsd/csi_test1 adb shell "cd /vendor/extsd/ && ./csi_test1 0 0 1920 1080 ./result 1 20000 60 0" adb shell ls /vendor/extsd/result adb pull /vendor/extsd/result pause
最后会在 bat 指令的文件夹生成 result 文件夹里面保存二进制的图像数据 *.bin 文件;可用 RawViewer 等软件查看图像数据。demo 参数说明:0 0 1920 1080 ./result 1 20000 60 0,分别表示 video0,set_input index0,目标分辨率宽,目标分辨率高,bin 文件保存路径、图像格式(如 NV21,具体含义可以看 demo 代码的 s_fmt 参数)、采集帧数(帧数大于 10000 即为常开节点)、目标帧率、和是否开启 wdr。
4.2 调用流程
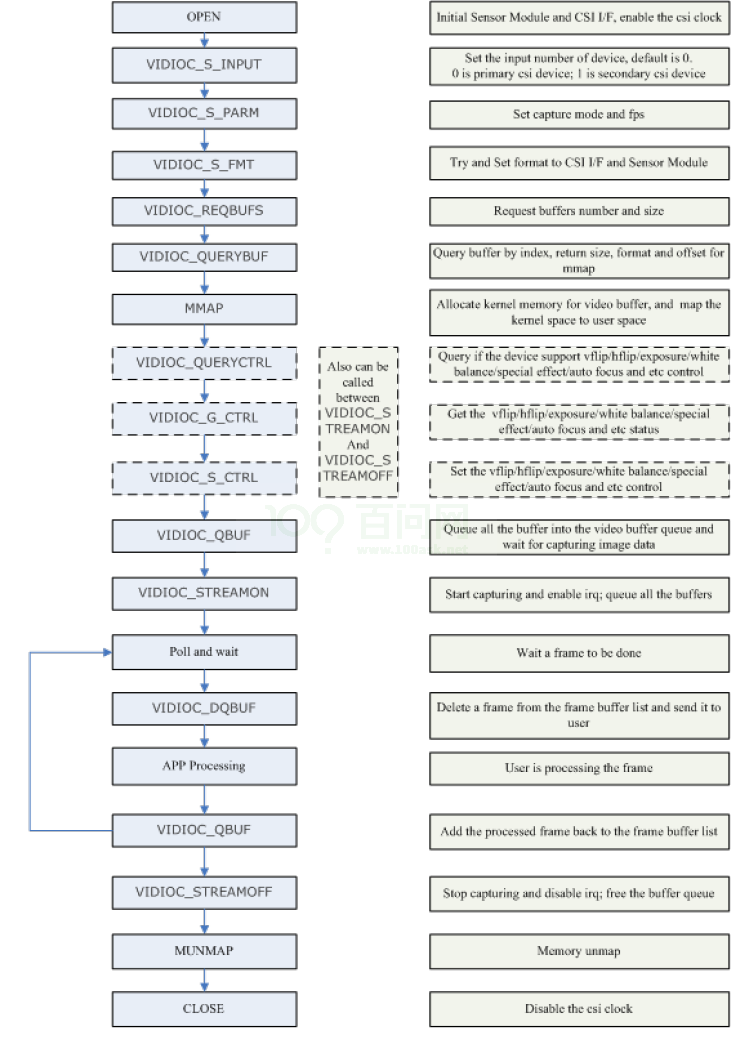
图 4-1: CSI 调用流程
5 FAQ
5.1 调试方法
5.1.1 调试节点
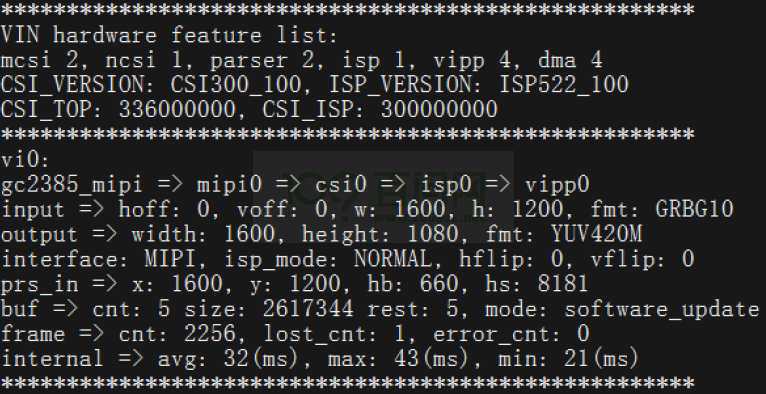
图 5-1: vi 节点
当系统打开 DEBUG_FS 编译宏时,可以 cat /sys/kernel/debug/mpp/vi 查看;否则可以
cat /sys/devices/platform/soc@2900000/2000800.vind/vi。
vi 节点保存的是当前或上一次工作(当前没有工作)的状态。下面对 vi 节点的关键信息进行说明。
CSI_TOP、CSI_ISP 分别是对应 CSI、和 ISP 的工作频率;input 一行表示 CSI 接收到的图片尺寸,fmt 表示输入数据的格式;
output 表示 CSI 出尺寸,如果使用了缩放或者裁剪,那么输入输出尺寸会不一致,fmt 表示数据的输出格式;
最后一行分别表示平均帧间隔、最大帧间隔、最小帧间隔,可以计算得出帧率,调试帧率时可以参考。
5.1.2 settle time
方式一:修改对应 sensor 驱动中的 sensor_probe 函数,可以添加或修改 info->time_hs 的值即可。
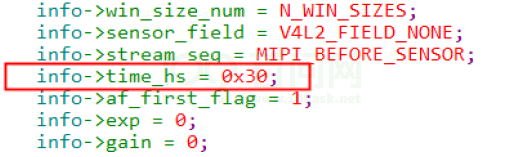
图 5-2: info->time_hs
方式二:通过 mipi 子设备的 settle_time 节点在线进行修改,settle_time 节点路径:/sys/devices/platform/soc/5800800.vind/5810100.mipi。
进入节点路径后,可以看到当前目录下存在 settle_time 节点:

图 5-3: settle time 节点
可以通过 cat、echo 命令,对 settle_time 节点进行读写操作:

图 5-4: settle time 节点读写
调整策略:settle time 的值慢慢增大调整,调大直到不能出图,再取一个略低于最大值的数值即可。调整范围:0x00-0xff。
5.1.3 信号状态
介绍如何观测 SOC 主控的接收数据的信号状态,分别对 MIPI 和并口做出说明。
5.1.3.1 MIPI
MIPI 传输模式有两种:
LP(Low-Power)模式:用于传输控制信号,最高速率 10 MHz。
HS(High-Speed)模式:用于高速传输数据,以 MIPI DPHY V1.1 版本为例,速率范围 [80Mbps - 1.5Gbps] per Lane。
可以通过查看 user manual MIPI PHY 部分寄存器,观测 SOC 识别到的 clock lane 和 data lane 的 LP、HS 状态。
5.1.3.2 并口
对于并口接口的 sensor,可以查看 user manual CSI PARSER 部分的 parser signal 寄存器,观测 sensor 端 PCLK、DATA 的信号状态。以此判断 parser 是否有识别到 sensor 端发送的数据。
5.2 常见问题
5.2.1 I2C 不通
如下图打印:
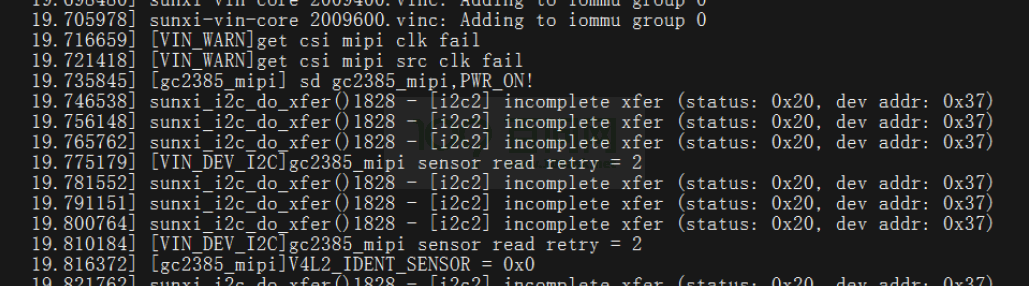
图 5-5: i2c 不通
【分析步骤一】:确认供电、MCLK、i2c 上拉等外围电路信号是否正常。使用万用表测量板子上AVDD、DVDD、IOVDD 供电电压、MCLK 频率、幅度、RESET、PWDN 的电平是否符合要求。
【分析步骤二】:确认 i2c 地址,TWI 通道是否和原理图一致。
【分析步骤三】:以上都正常就用示波器或者逻辑分析仪测量分析主控发出 i2c 波形是否正确、有无回应;最后可以考虑 sensor 损坏或者接口错位等问题。
5.2.2 sensor 不出图
【分析步骤一】:确认 chip id 和 datasheet 上一致。
在对应 sensor 驱动的 sensor_detect 函数中读 chip id 寄存器,这一步也能检验 i2c 的读写是否正确。
【分析步骤二】:确认配置已经配置到 sensor 里。
可以把写进去的寄存器读出来和写入值对比是否一致。
【分析步骤三】:确认配置正确并且 sensor 已经输出图像。
和原厂确认寄存器配置、用示波器测量 sensor 端的 mipi 数据 lane 和时钟 lane 波形,分析是否正在发送数据。
【分析步骤四】:确认 SOC 是否接收到 sensor 数据。
mipi 的 clock lane 存在两种工作模式,一种是连续时钟模式,传输过程不会切换 LP 状态;另一种是非连续时钟信号模式,每传输完一帧图像数据,帧 blanking 时将会切换为 LP 状态。目前大部分 MIPI sensor 一般都是非连续时钟模式。
如果 sensor 是连续时钟模式,要保证 MIPI 在 sensor 之前初始化,需要在 sensor 驱动 sensor_probe() 中配置 info->stream_seq = MIPI_BEFORE_SENSOR;
如果 sensor 是非连续时钟模式,可以通过判断 SOC 识别到的 LP、HS 模式状态是否在不断切换,来间接判断 SOC 的 MIPI 的接收状态。
查看 user manual MIPI PHY 部分寄存器,观测 clock lane 和 data lane 的 LP、HS 状态是否有在不断切换,有则说明 MIPI 已经接收到了 sensor 发送的数据。如果没有切换则说明 MIPI 没有正确接收 sensor 数据。此时应该检查 MIPI 相关配置是否正确。
【分析步骤五】:尝试修改 settle time。
如果可以确定 sensor 已经在正确发送数据,只是 MIPI 这边一直接收不到导致无法出图,可以尝试修改 settle time(参考调试方法章节)。
5.2.3 已出图但画面是绿色或者粉红色
一般是 YUYV 顺序反了,可以修改 sensor 驱动中 sensor_formats 结构体的 mbus_code 参数,修改 YUV 顺序即可。
5.2.4 I2c 已通,但是读所有 sensor 寄存器值都为 0
【分析步骤一】检查 i2c 通讯 addr 和 data 的位宽。
检查 sensor 驱动中 cci_drv 结构体中定义的值是否符合 datasheet 要求。
【分析步骤二】检查 i2c 通讯数据大小端是否不一致。
可以在读 sensor id 时把地址高低位相反来快速验证一下。
5.2.5 画面旋转 180 度
可以修改 board.dts 里面的 hflip 和 vflip 来解决,如果画面和人眼成 90 度的话,只能通过修改 sensor 配置来解决(只有部分 sensor 支持)。
5.2.6 没有 video 节点
【问题解析】没有加载 ko 或者 ko 加载失败。
【分析步骤一】检查模块加载顺序是否正确。
lsmod 看一下模块是否加载正确,如果报的错误是 [VIN_ERR]registering gc2355_mipi, No such device! 则表明 sensor 模块 gc2355_mipi 没有加载。
【分析步骤二】检查 board.dts 文件配置是否配置了 vind0,且 status 为 okay。
【分析步骤三】如果是加载失败检查加载失败的原始是 i2c 不通还是没有 ko。
i2c 不通参考前面的分析,没有 ko 请检查是否有对应的驱动并且在 Makefile 中使能了编译。
-
Linux
+关注
关注
87文章
11302浏览量
209426 -
MIPI
+关注
关注
11文章
310浏览量
48616 -
CSI
+关注
关注
1文章
36浏览量
50984 -
编译
+关注
关注
0文章
657浏览量
32867
发布评论请先 登录
相关推荐
【DragonBoard 410c试用体验】DragonBoard 410c官方全套文档
Rockchip Linux SDK uboot logo开发指南




【北京迅为】itop-龙芯2k1000开发指南Linux基础入门vim 编辑器





 工商网监
工商网监
评论