 深入理解自动控制原理
深入理解自动控制原理
1. 控制原理
1.1 开环与闭环系统
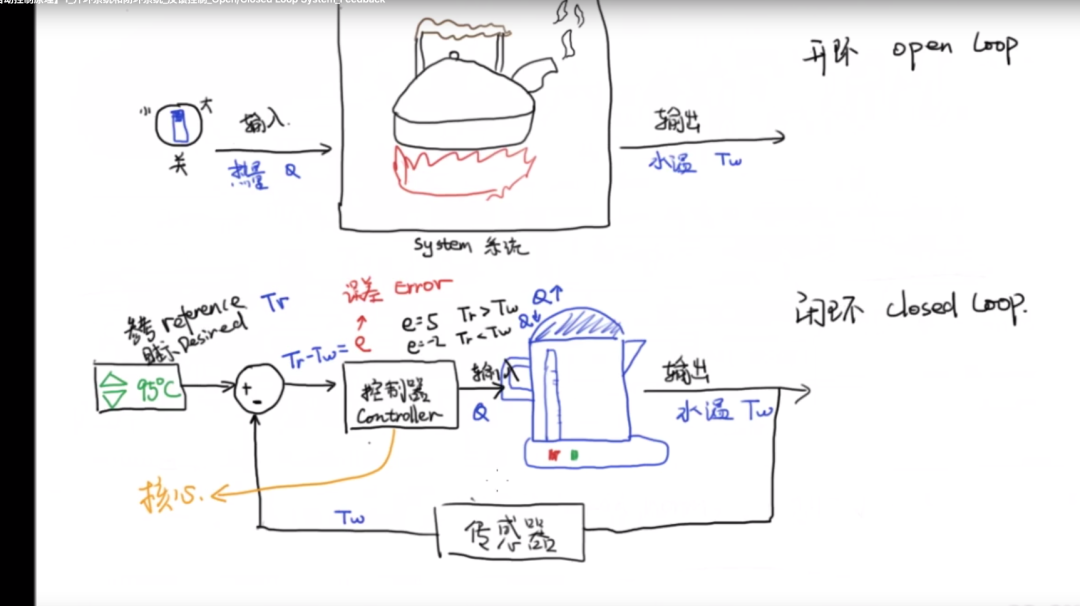
下面是开环系统与闭环系统的示例。以给水壶加热的过程举例,开环系统只是简单的利用开关信号控制水壶的加热。
而下图的闭环控制系统中,将添加温度传感器所测量的信号作为系统的反馈量。设计控制系统的核心就是通过对闭环系统的控制器进行调整,利用反馈量信号,完成闭环的稳定控制。
同时,这就是反馈的过程。
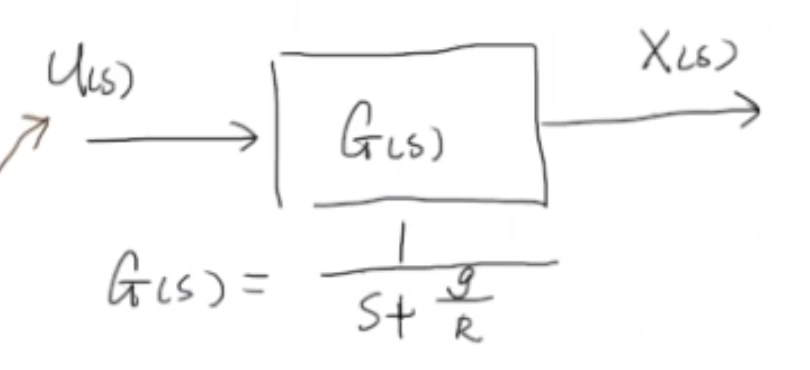
简单的开环系统有如下描述:(这里以流体力学的公式作为举例)
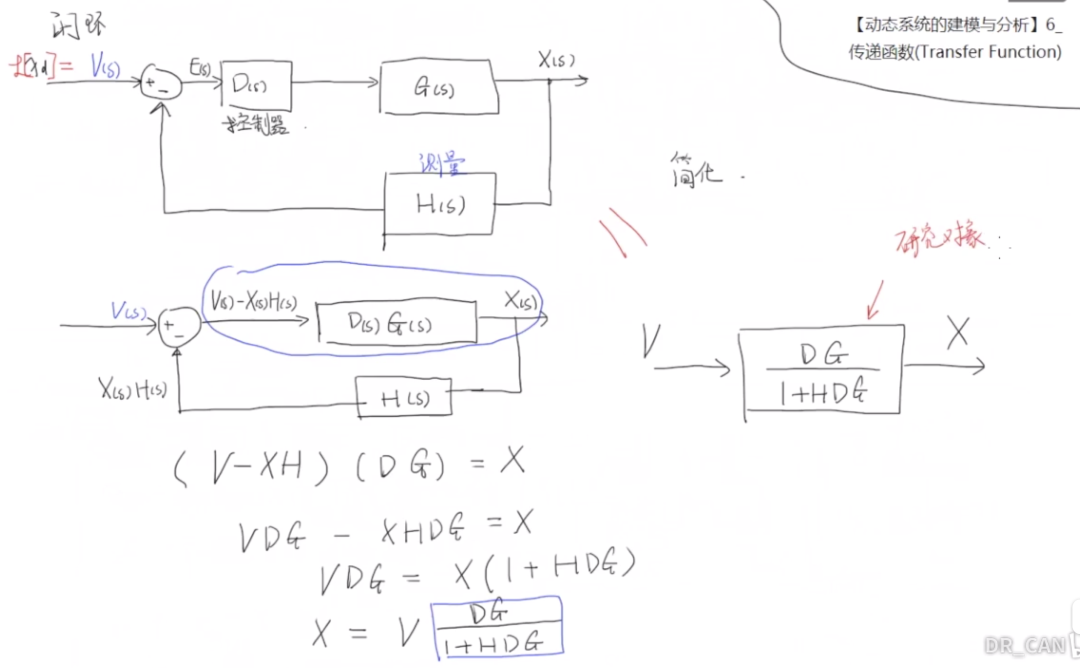
添加控制器D(s),并增加测量H(s),构成如下闭环系统。
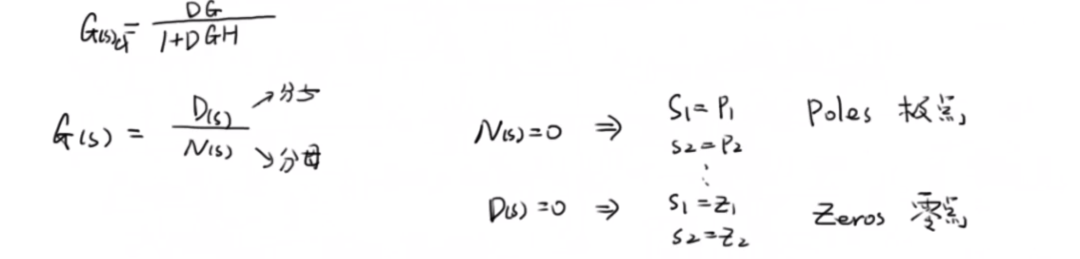
但是在分析闭环系统的稳定性时,一般的做法是将其转换成为开环系统,并将新构造的开环系统传递函数作为研究对象,分析系统的稳定性。
1.2 稳定性分析
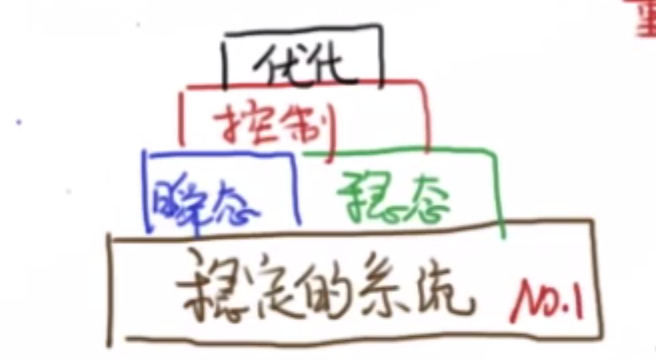
对于一个系统,如果没有稳定性的先决条件,那么其他的(稳态误差分析、瞬态误差分析)将无从说起。稳定性:传递函数极点在复平面的左半边。(横坐标为极点,纵坐标为零点)
所以对于系统稳定性的讨论,实际上是在分析输入为单位冲激函数时,系统输出的传递函数。最后观察系统输出随时间变化的曲线是否到达稳定的位置。
零点和极点的定义如下:
分析为什么极点为负的,系统是稳定的:
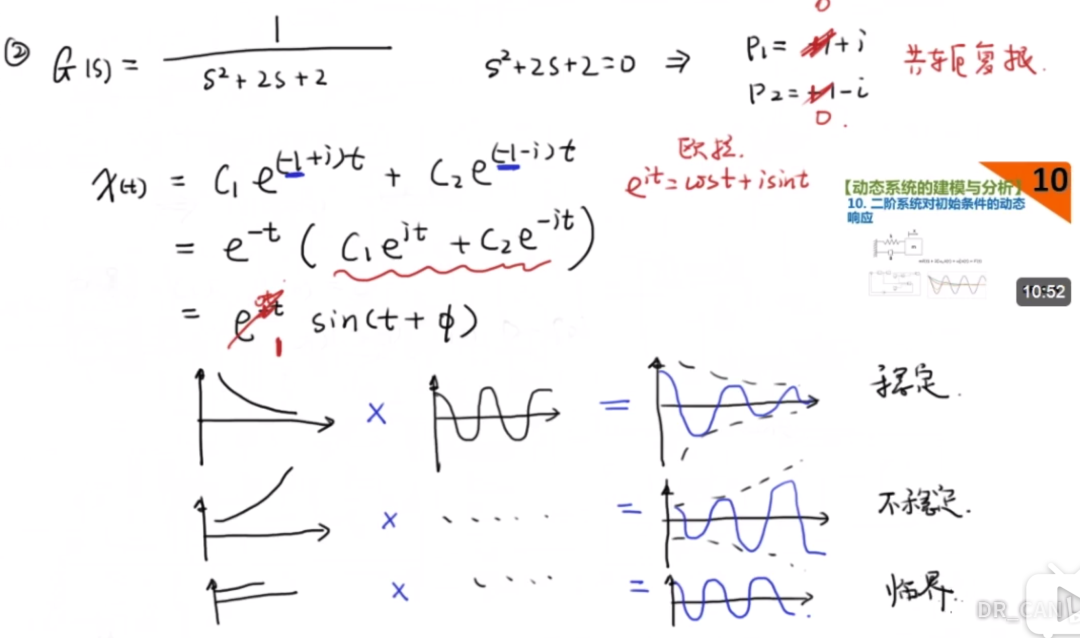
下面这个图要更加直观:
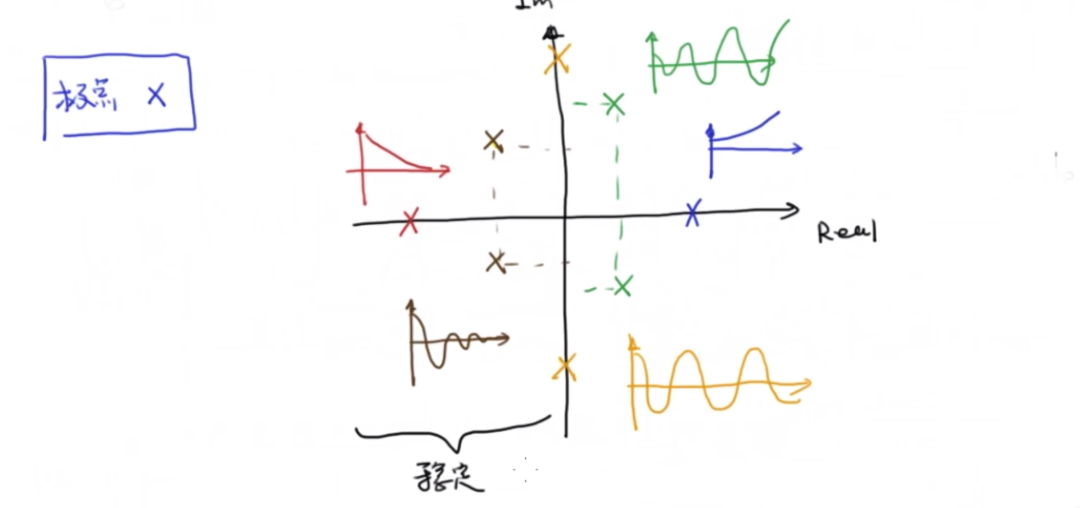
那么我们如何设计控制器?就是将最终的传递函数的极点在左边平面,叫做极点配置。现代控制理论中,研究的是状态矩阵的特征值,对应的就是传递函数的极点。
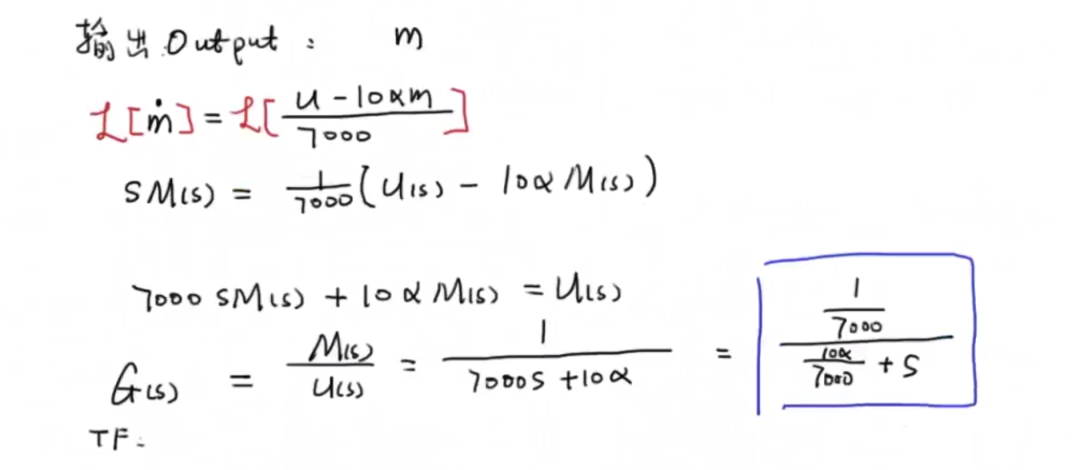
1.3 一起燃烧卡路里/科学减肥(系统分析实例_数学建模部分)
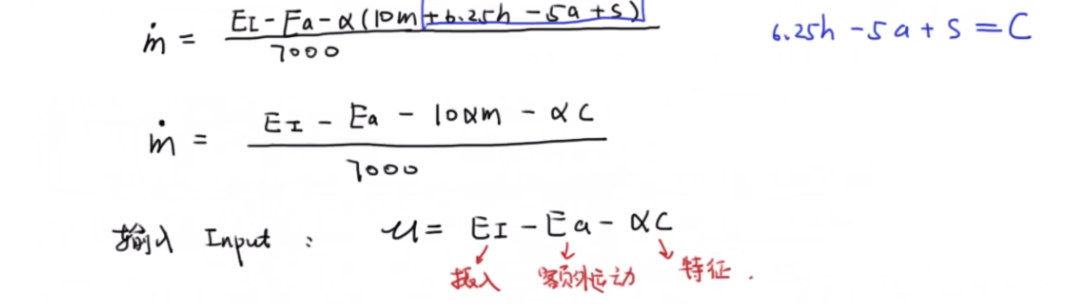
框图表示如下:
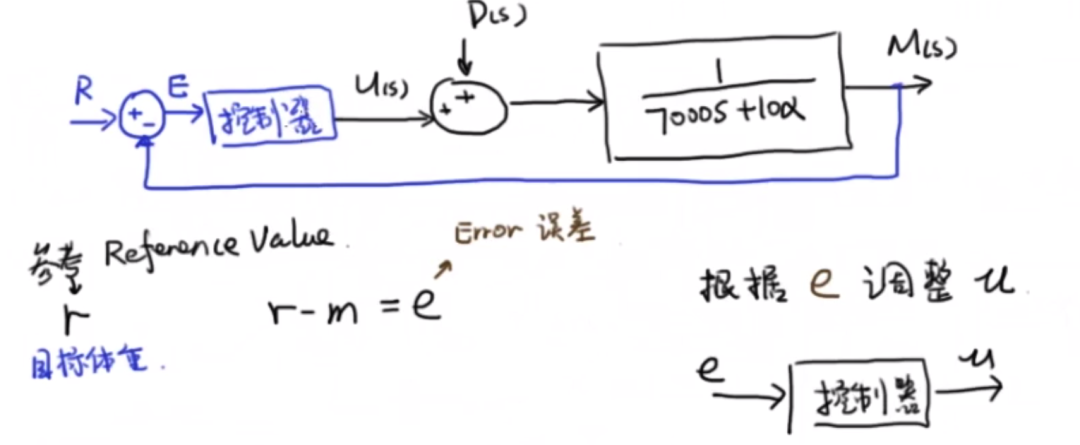
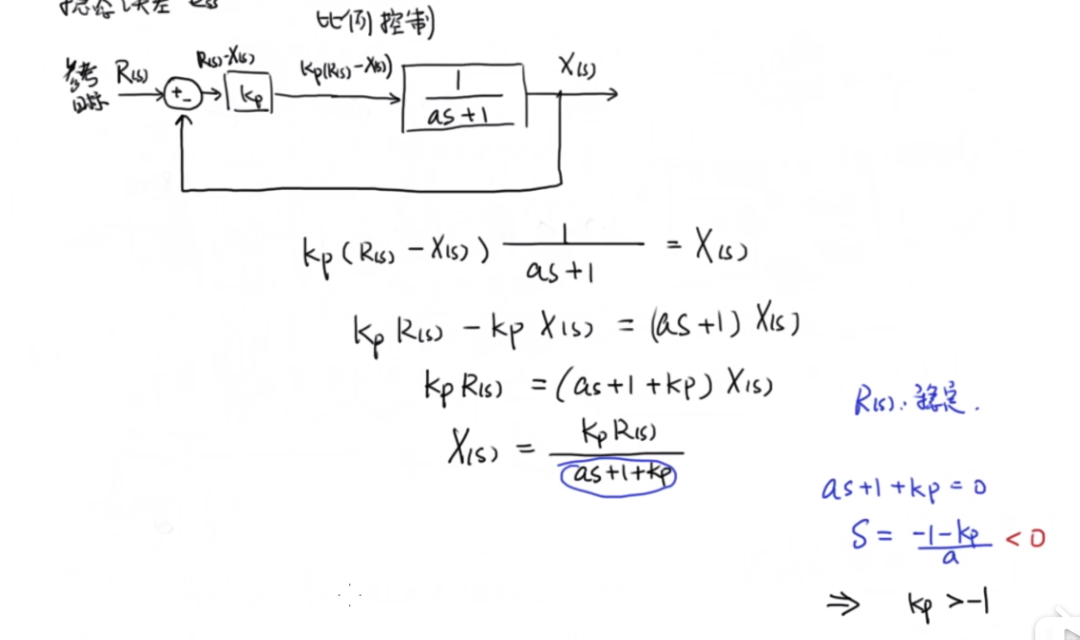
设计比例控制器(最为简单的控制器)如下:
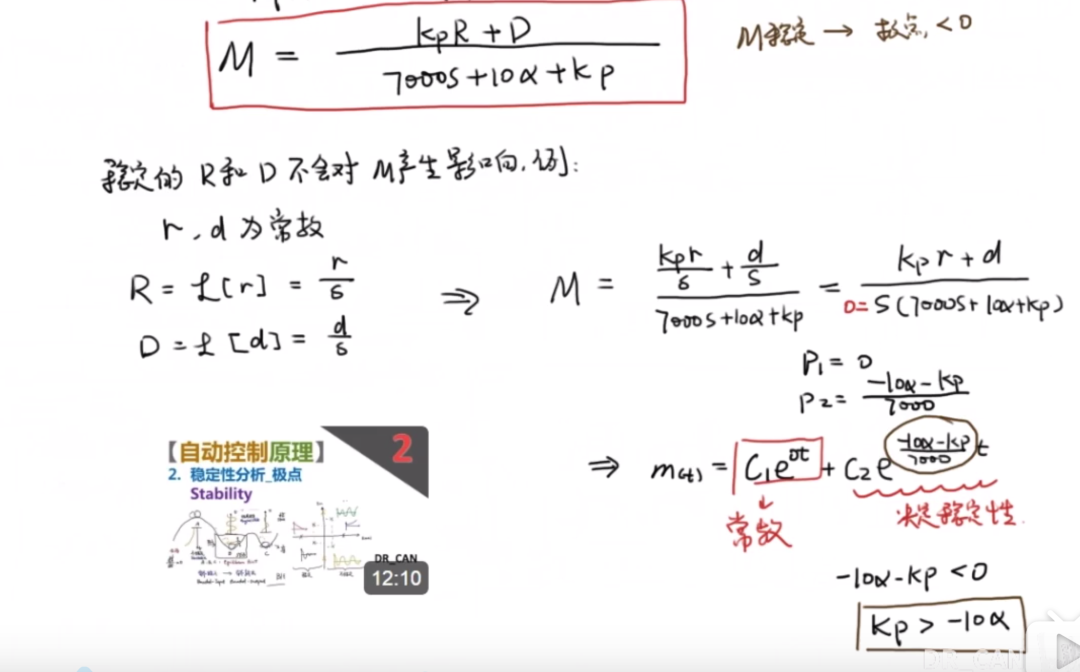
那么如何设计该控制器,让最终的系统趋向于稳定状态呢?(也就是说传递函数的极点在左半边平面)
学习控制理论一定要从微分方程入手,弄清楚微分方程与传递函数之间的关系就会容易理解很多。
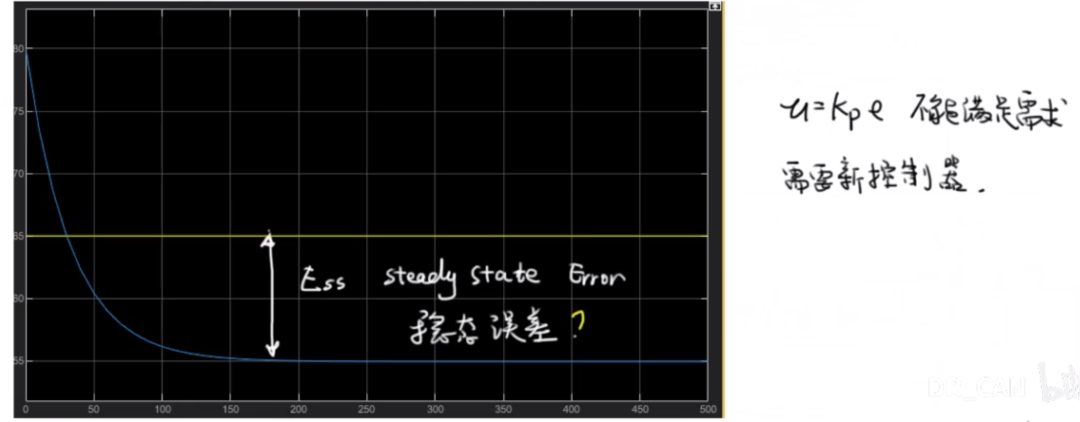
通过对于比例控制器的分析之后发现,单纯的比例控制最终产生稳态误差。
1.4 终值定理与稳态误差
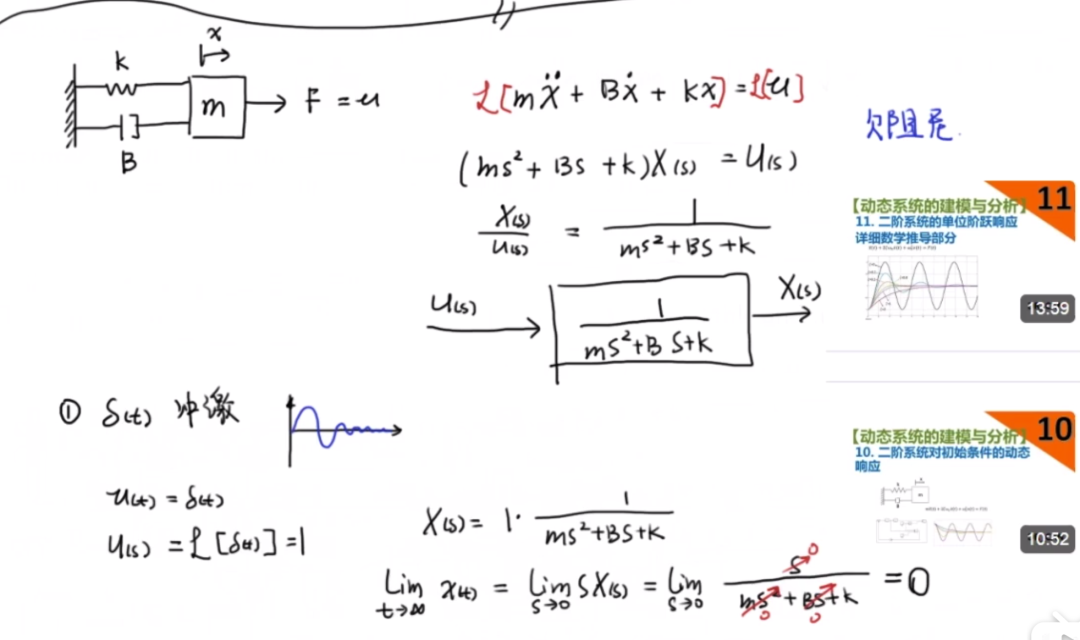
下面讨论的系统是存在参考信号的系统,类似于下图。终值定理,用来算系统输出的极限的工具。(FVT)
下图解释了弹簧阻尼系统的传递函数,还有在冲激响应下系统的终值定理的使用方式。
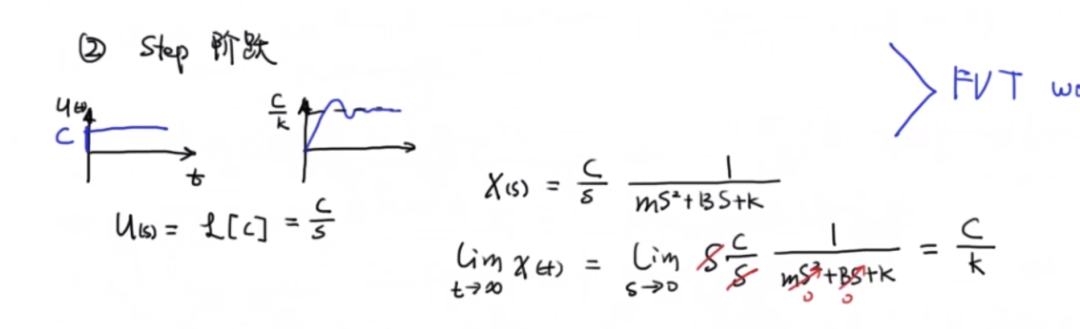
这里需要注意的是第二种情况,代表了输入参考信号为c时(相当于r)的情况。
条件如下:
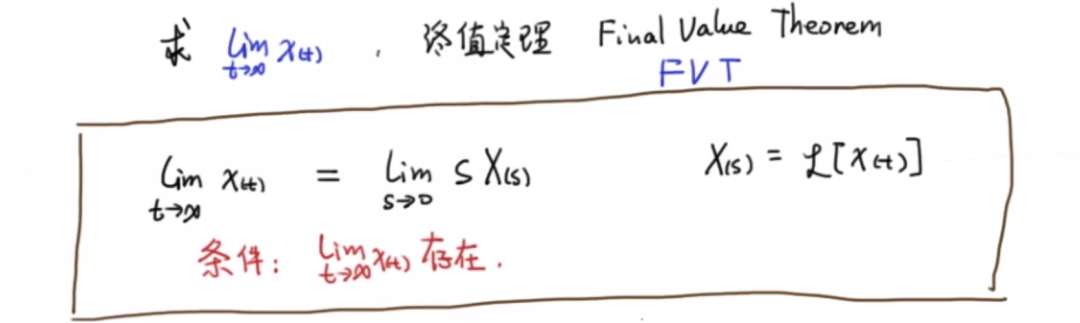
最终求出来的极限值经过运算就是系统的稳态误差。

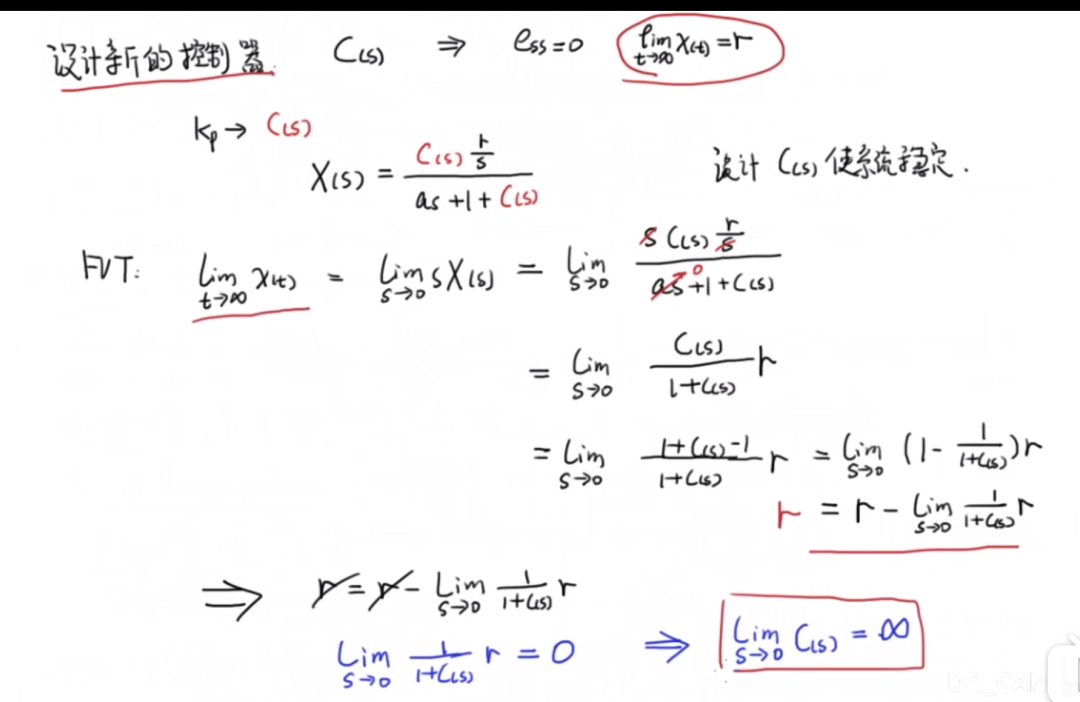
1)比例控制
举例说明。下面是一个最为简单的一阶系统,采用的控制方式是比例控制。
利用定理分析稳态误差如下:

这里说明了比例控制的局限性,必须采用更加实用性的控制算法。比例控制充法消除稳态误差
2)比例积分控制
并有下面变换方式:
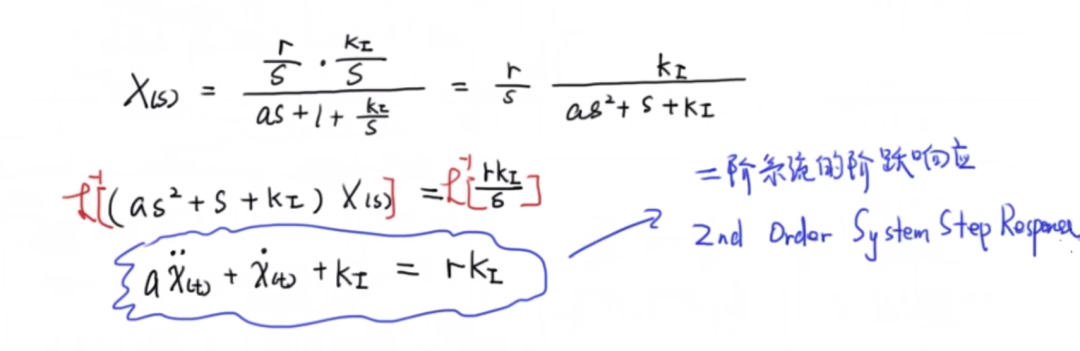
通过引入一个积分信号,让本来的一阶系统变成一个二阶系统。
1.5 根轨迹
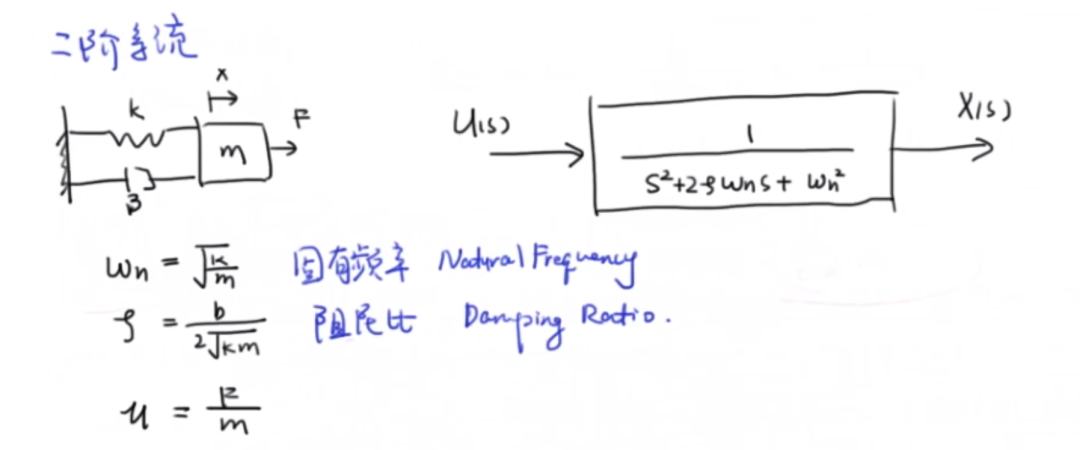
再回到弹簧系统,是一个二阶系统。
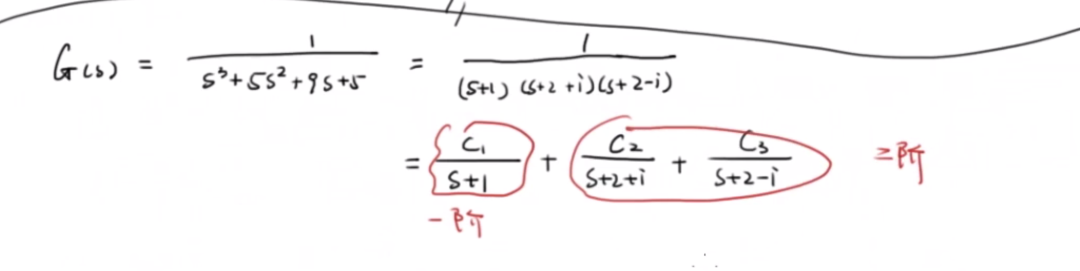
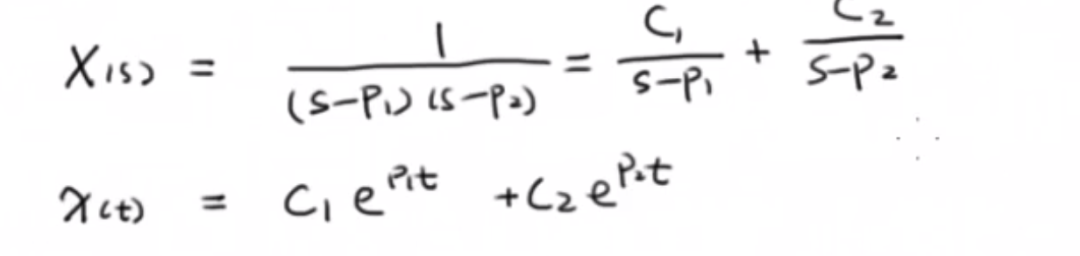
对于高阶系统不过也是几个一阶系统的叠加,如下:
这一节评估了根的位置对于控制器的影响。

1.6 PID控制
比例控制
微分控制:调节水温变化的速度,
积分控制:误差的累计量
注意:
比例积分控制没有单独的比例控制收敛快
微分控制解决了超调量问题
微分控制的问题是初始状态下的输入值很大
同时,微分控制的控制量受到测量误差的影响非常大。他对噪声非常敏感
2. 数学工具
2.1 拉普拉斯逆变换
2.2 矩阵的性质
矩阵有下面的性质,现代控制理论的分析中常常会用到。

2.3 bode图
给信号滤波的过程中,需要注意幅频响应。如果在带通范围内不是1的话,就会改变信号的幅值,就会改变最终加速度输出的信号。
另外,上面的图就是bode图,但是是基于离散系统的。
如何去理解bode图?
bode图是针对于传递函数而言的,用在连续系统上。(因为控制系统常常用传递函数来表示。)
%% 这个是正解b = [1,2,3];a = [2,1,3];figure;bode(b,a)% [h1 , ftp] = freqs(b,a);mag = 20*log10(abs(h1)); % get magnitude of spectrum in dBphase = angle(h1)/pi*180; % get phase in deg.figuresemilogx(ftp,mag)xlabel('Frequency (Hz)'),ylabel('Magnitude (dB)')
(这样描述是和真实系统不一致的,具体参考滤波器性质)
总结来说有以下几点:
振幅的比较用10log10就行,但是能量的比较需要20log10

振幅与功率/能量之间的关系如下:

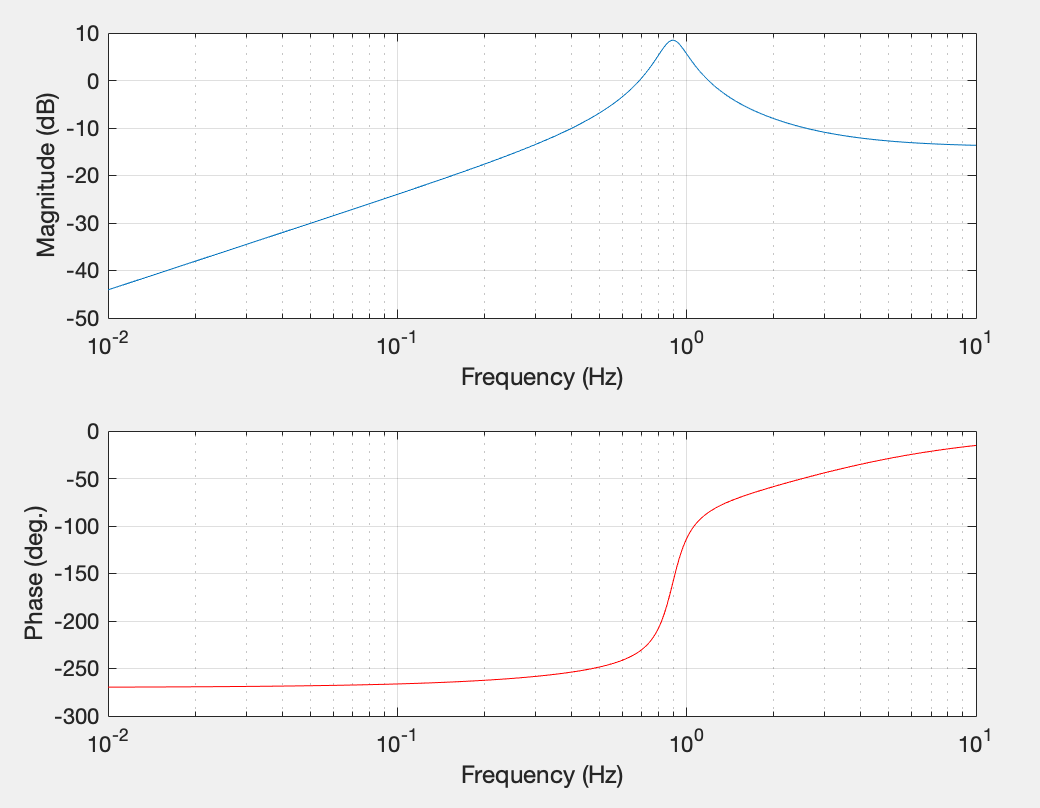
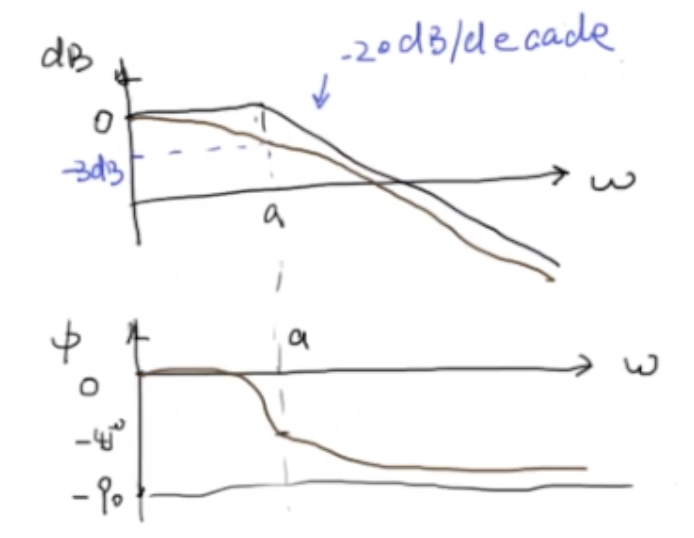
从一个实例出发理解bode图
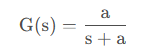
对于系统传递函数:
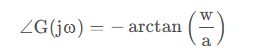
分析频率响应:
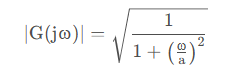
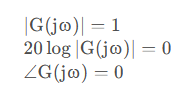
低频:w<
截止频率:w=a
这个-3dB很重要,表达的是输出的振幅是输入的振幅的sqrt(1/2),能量是一半的关系。


高频:w>>a

bode图如下:
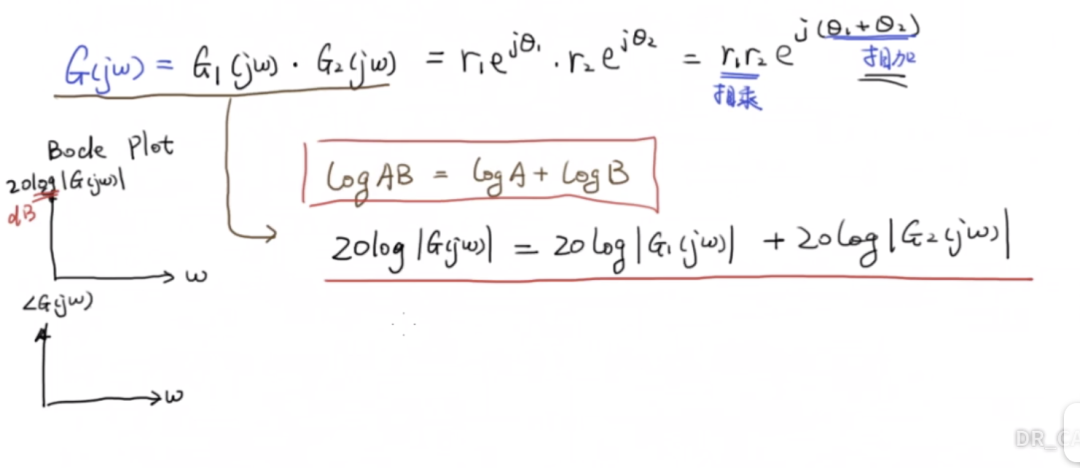
bode图的作用是什么?
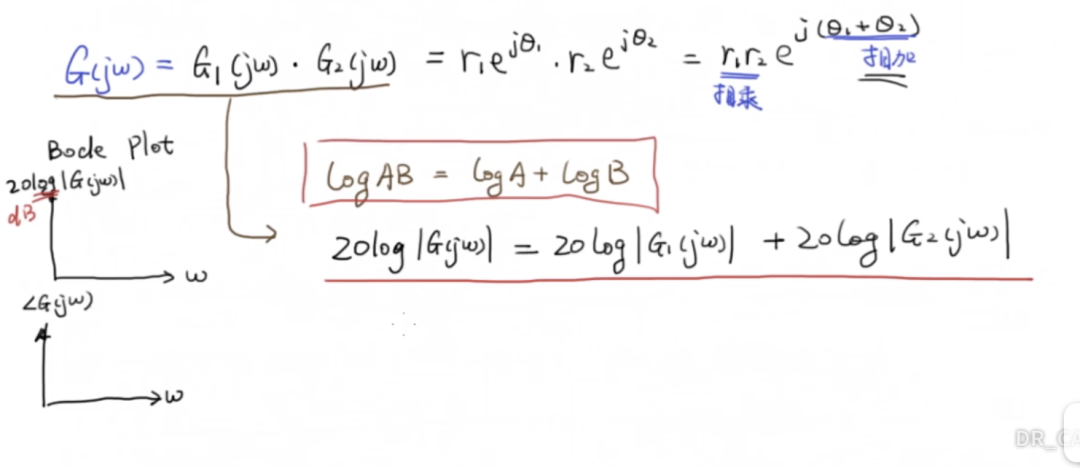
实际上,我们可以将级联系统的子系统bode图进行累加,那么我们就得到了新的级联系统的真正的bode图了。原理如上。
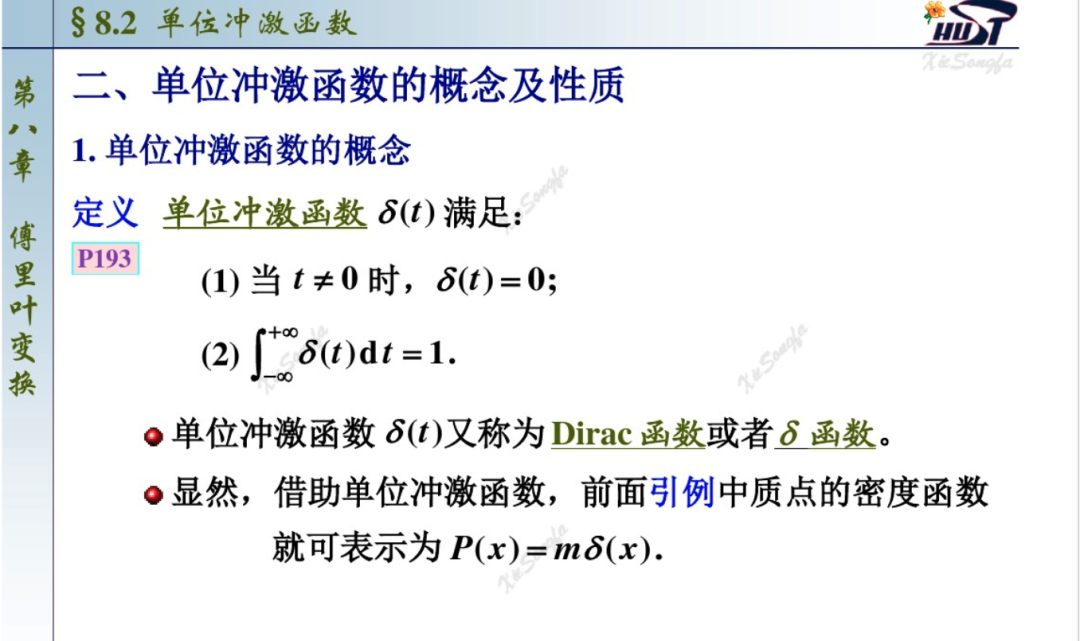
2.4 单位冲激函数
三. 现代控制原理串讲
1. 现代控制理论概要
首先要了解一个简单的弹簧阻尼模型,作为控制的对象,其满足胡克定律。
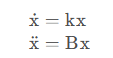
描述现代控制理论中的系统,最基础的当然是状态空间表示法:
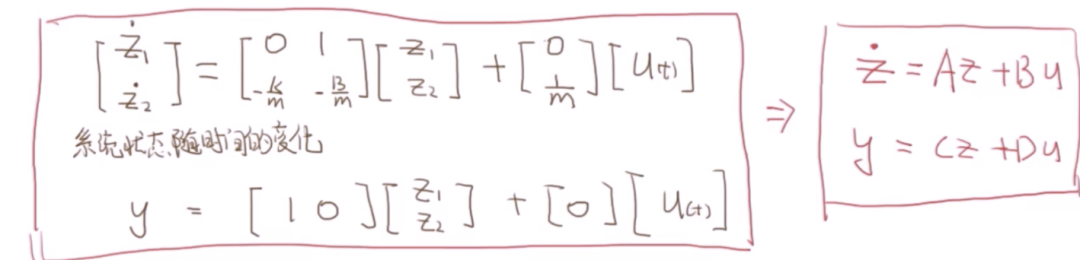
当然,通过拉普拉斯变换可以转换成下面的形式,控制对象是弹簧阻尼块。

其中有一条重要的信息,实际上矩阵A的特征值就是G(s)的极点,决定了系统的稳定性。上面的右式时通用的。
去分析一个系统,主要需要考虑以下几个重要的性质。
(那么对于自动控制,只需要极点就够了)
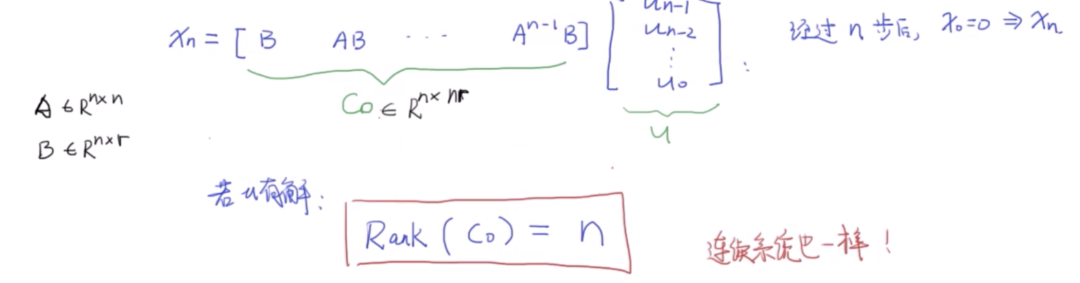
可控性
李雅普诺夫稳定性:确定系统的稳定状态,控制系统可以满足数学的条件。在一阶系统中,常常用极点分析的方法去观察稳定性。现代控制理论中常用到的分析系统的方法就是去找系统的V函数,得到最后是不是能够
可观性:状态观测器。系统状态加入不可直接测量,那么就需要通过输出和控制量去估计状态。状态观测器需要达到一个收敛的状态。建立观测器时,实际上是建立一个反馈系统,使得误差等于0。(这里是不是有误差状态量的部分?)
对于可观测性,需要问一个问题:是不是所有系统都是可测的?借鉴可控性的推导,有下面的结论:

2. 怎样去分析一个状态空间方程系统呢?
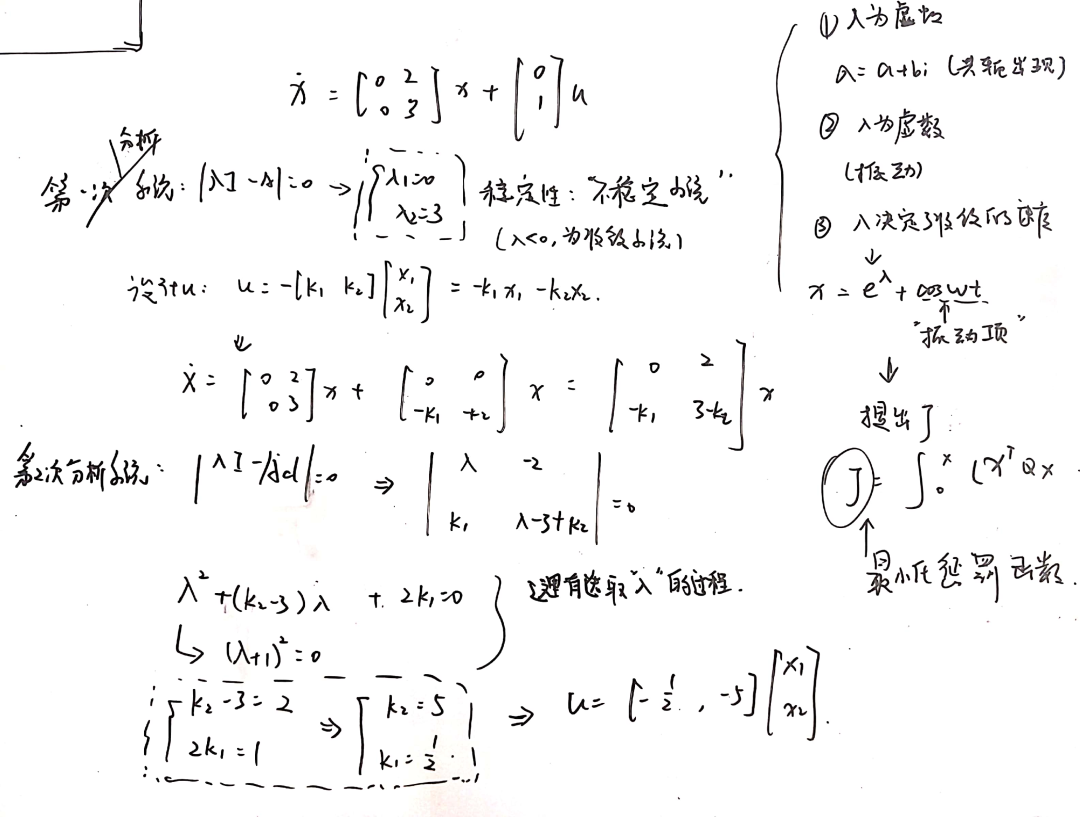
实际上看到设计控制器就是去配置特征值的过程。这里的特征值有点像自动控制原理中的极点的概念,决定了系统随时间是收敛的,还是振动的,还是逼近于无穷的。
下面是对于一个控制系统的分析过程,利用配置特征值的方法可以确定比例控制的控制系数u与状态量x之间的关系。
四. 最后的一些思考
轨迹跟踪与制导之间的关系
轨迹跟踪的目标是使状态和参考状态的误差保持在0附近。举例,对深空飞行器而言,按照轨迹优化+轨迹跟踪这两个步骤实现控制。
参考轨迹是人为设计的,可以是全局最优的,也可以是次优的。然后把跟踪误差保持在0附近,这也有一套控制律,比如LQR轨迹跟踪器。
状态控制按照给定的控制律,在航天器轨迹控制中叫做制导;在姿态控制中好像没见过先设计好姿态运动规律的,都是即时控制。
制导律必须全局渐进稳定,适用于高动态的环境,比如空空导弹采用比例导引法。
-
控制系统
+关注
关注
41文章
6625浏览量
110639 -
闭环控制
+关注
关注
0文章
94浏览量
15602 -
开关信号
+关注
关注
0文章
23浏览量
13848 -
控制原理
+关注
关注
0文章
10浏览量
7067 -
反馈
+关注
关注
3文章
43浏览量
4886
原文标题:自动控制原理(深入理解自动控制框架)
文章出处:【微信号:机器视觉沙龙,微信公众号:机器视觉沙龙】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论