 增强电机控制编码器应用的通信可靠性和性能
增强电机控制编码器应用的通信可靠性和性能
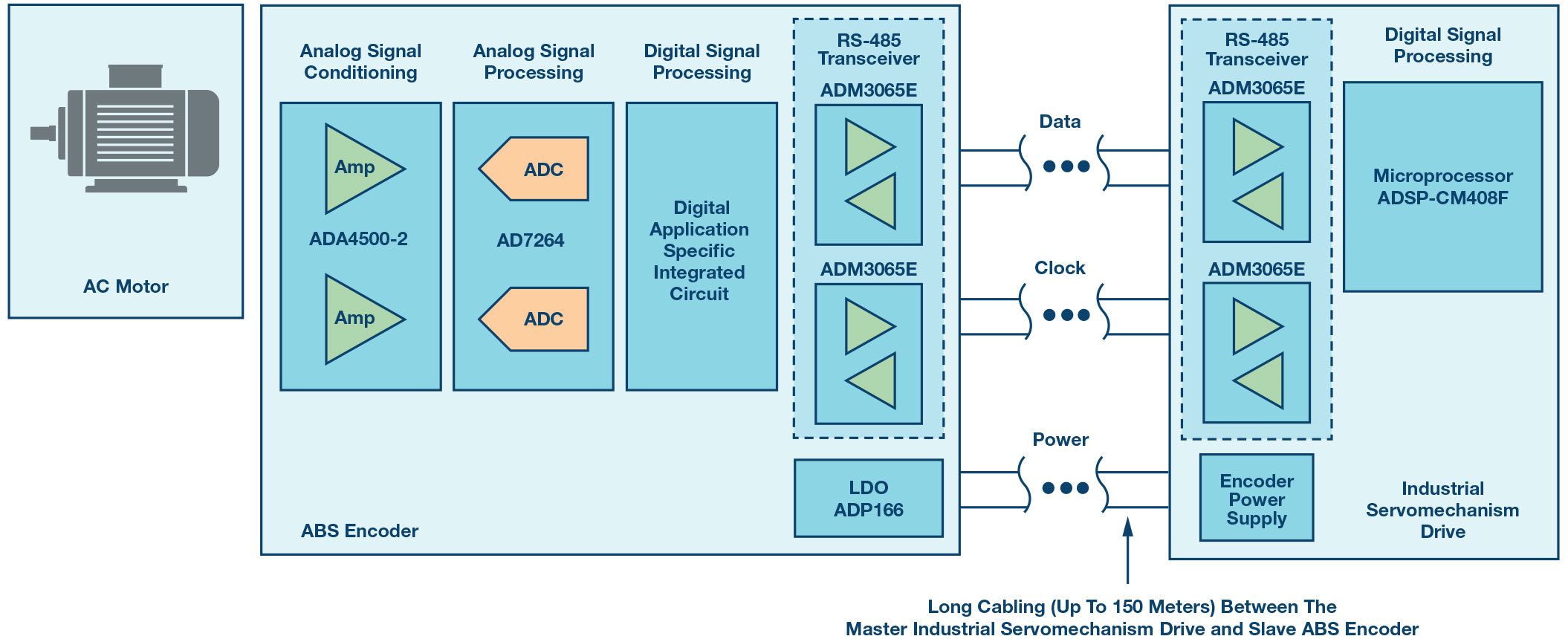
旋转编码器广泛用于工业自动化系统。这种类型的编码器的典型用途是用于电机,其中编码器连接到旋转轴,从而为控制系统提供反馈。虽然编码器的主要用途是角位置和速度测量,但系统诊断和参数配置等附加功能也很常见。图1显示了一个电机控制信号链,该信号链使用RS-485收发器和微处理器连接绝对编码器(ABS编码器)从机和工业伺服驱动器主站,用于交流电机的闭环控制。
伺服驱动器和ABS编码器之间的RS-485通信链路通常需要高达16 MHz的高数据速率和低传播延迟时序规格。RS-485电缆通常最长可达50米,但在某些情况下可能长达150米。电机控制编码器应用是具有挑战性的数据通信环境,因为电噪声和长电缆会影响RS-485信号的完整性。本文重点介绍使用ADI公司50 Mbps (25 MHz)ADM3065E RS-485收发器和ADSP-CM40x混合信号控制处理器的电机控制应用的主要优势。
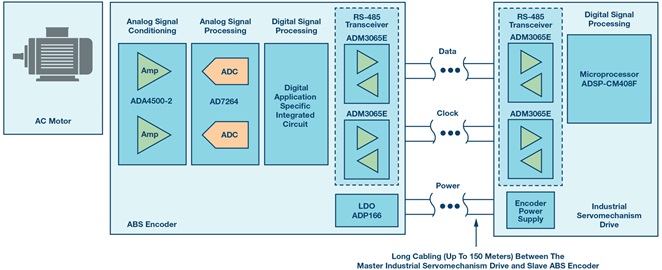
图1.使用RS-485在绝对编码器从机到伺服驱动主站之间连接,以实现交流电机的闭环控制。
ADM3065E RS-485收发器专为在电机控制编码器等恶劣环境中可靠工作而设计,具有更高的抗扰度和(IEC) 61000-4-2静电放电(ESD)鲁棒性。
抗噪性
RS-485信令具有平衡、差分和固有的抗噪声功能。系统噪声平均耦合到RS-485双绞线电缆中的每根电线。一个信号发出与另一个信号相反的信号,耦合到RS-485总线上的电磁场相互抵消。这减少了系统的电磁干扰(EMI)。此外,增强型ADM3065E 2.1 V 驱动强度可在通信中实现更高的信噪比 (SNR)。使用ADuM3065D可以轻松实现为ADM141E添加信号隔离。ADuM141D是一款基于ADI耦合器技术的四通道数字隔离器。ADuM141D的工作速率高达150 Mbps,适合与50 Mbps ADM3065E RS-485收发器配合使用(见图2)。直接功率注入 (DPI) 测量器件抑制注入电源或输入引脚的噪声的能力。ADuM141D中使用的隔离技术已经过DPI IEC 62132-4标准的测试。ADuM141D抗噪性能优于同类产品。ADuM141D在整个频率范围内保持出色的性能,但其他隔离产品在200 MHz至700 MHz频段内会出现误码。®
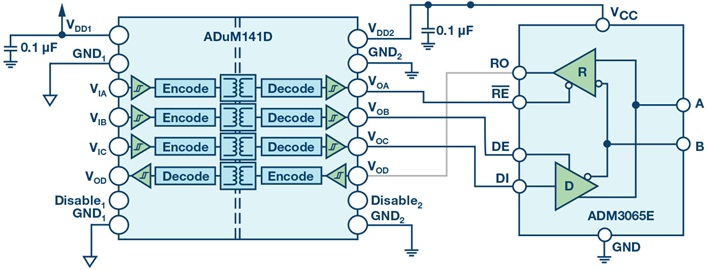
图2.信号隔离、50 Mbps RS-485解决方案(简化图—未显示所有连接)。
IEC 61000-4-2 静电放电性能
裸露的RS-485连接器上的ESD以及编码器到电机驱动器的电缆是一种常见的系统危险。与可调速电力驱动系统的EMC抗扰度要求相关的系统级IEC 61800-3标准要求至少±4 kV接触/±8 kV空气IEC 61000-4-2 ESD保护。ADM3065E具有±12 kV接触/±12 kV空气IEC 61000-4-2 ESD保护,超过了这一要求。图 3 显示了 IEC 8-61000-4 标准的 2 kV 接触放电电流波形与人体模型 (HBM) ESD 8 kV 波形的比较。图4显示,这两个标准规定了不同的波形形状和峰值电流。与 IEC 61000-4-2 8 kV 脉冲相关的峰值电流为 30 A,而 HBM ESD 的相应峰值电流在 5.5 A 时小于 33× 以上。另一个区别是初始电压尖峰的上升时间,与HBM ESD波形相关的61000 ns相比,IEC 4-2-1 ESD的上升时间快得多,为10 ns。与IEC ESD波形相关的功率远大于HBM ESD波形的功率。HBM ESD 标准要求被测设备 (EUT) 经受 10 次正放电和负放电,而相比之下,IEC ESD 标准要求 10 次正放电和 3065 次负放电测试。具有IEC 61000-4-2 ESD额定值的ADM485E更适合在恶劣环境中工作,而其他RS-<>收发器具有不同级别的HBM ESD保护。
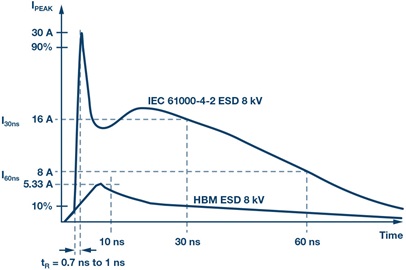
图3.IEC 61000-4-2 ESD 波形在 8 kV 时与 HBM ESD 波形在 8 kV 时的比较。
恩达特通信协议
编码器使用了许多通信协议;例如EnDat,BiSS,HIPERFACE和Tamagawa。尽管存在差异,但编码器通信协议在实现方面有相似之处。这些协议的接口是符合RS-422或RS-485电气规范的串行双向管道。虽然硬件层存在共性,但运行每个协议所需的软件是独一无二的。通信堆栈和所需的应用程序代码都特定于协议。本文重点介绍 EnDat 2.2 接口主端的硬件和软件实现。
延误的影响
延迟分为两类:第一类是电缆的传输延迟,第二类是收发器的传播延迟。光速和电缆的介电常数决定了电缆延迟,典型数字为6 ns/m至10 ns/m。当总延迟超过半个时钟周期时,主站和从站之间的通信中断。此时,设计器具有以下选项:
降低数据速率
降低传播
在主机侧引入延迟补偿
选项 3 可补偿电缆延迟和收发器延迟,因此是确保系统能够在长电缆上以高时钟速率运行的有效方法。缺点是延迟补偿增加了系统复杂性。在无法进行延迟补偿的系统中,或者在具有短电缆的系统中,使用具有短传播延迟的收发器的价值是显而易见的。低传播延迟可实现更高的时钟速率,而无需在系统中引入延迟补偿。
主实现
主实现由串行端口和通信堆栈组成。由于编码器协议不符合标准端口(如UART),因此无法使用大多数通用微控制器上的外设。相反,FPGA的可编程逻辑支持在硬件中实现专用通信端口,并支持延迟补偿等高级功能。虽然FPGA方法很灵活,可以根据应用进行定制,但它也有缺点。与处理器相比,FPGA成本高、功耗高,上市时间长。
本文讨论的EnDat接口的实现是在ADI公司的ADSP-CM40x上完成的,ADI公司是一款面向电机控制驱动器的处理器。除了用于电机控制的外设,如脉宽调制器(PWM)定时器、模数转换器(ADC)和sinc滤波器,ADSP-CM40x还具有高度灵活的串行端口(SPORT)。
这些SPORT能够模拟许多协议,包括EnDat和BiSS等编码器协议。由于ADSP-CM40x具有丰富的外设集,因此可以执行高级电机控制,也可以与具有相同器件的编码器接口。换句话说,消除了对FPGA的需求。
测试设置
EnDat 2.2 测试设置如图 4 所示。EnDat 从站是科尔摩根 (AKM22) 的标准伺服电机,轴上安装了 EnDat 编码器 (ENC1113)。三对电线(数据线、时钟线和电源线)将编码器连接到收发器板。EnDat PHY上的编码器有两个收发器和电源。其中一个收发器用于时钟,另一个收发器用于数据线。EnDat 主站通过 ADSP-CM40x 使用标准外设和软件的组合实现。发射端口和接收端口都是通过灵活的 SPORT 实现的。
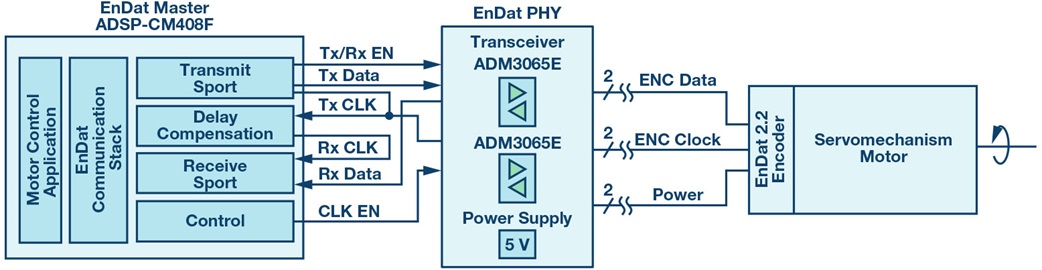
图4.实验设置。
EnDat 协议由许多不同长度的不同帧组成。但是,这些帧都基于相同的序列,如图 5 所示。首先,主站向从站发出命令,然后从站处理命令并执行必要的计算。最后,从站将结果发送回主站。
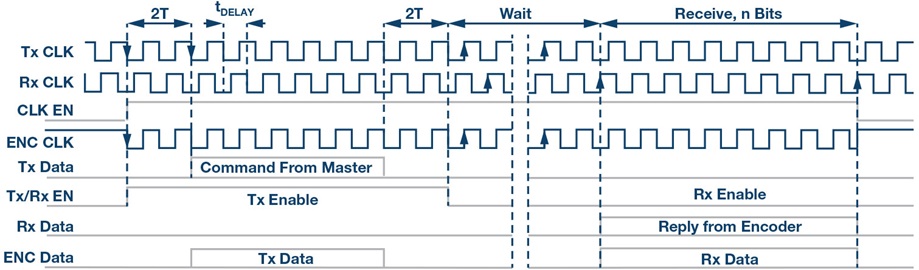
图5.EnDat 发送/接收序列。
发送时钟(Tx CLK)由处理器ADSP-CM40x产生。由于系统中的延迟,来自编码器的数据在返回处理器之前将与传输时钟异相。为了补偿传输延迟,t延迟,处理器还发出接收时钟(Rx CLK),延迟 t延迟与传输时钟相比。使接收时钟与从站接收的数据同相是补偿传输延迟的有效方法。
来自处理器的时钟信号是连续的,而EnDat协议规定时钟只能在通信期间应用于编码器。在所有其他时间,时钟线必须保持高电平。为此,处理器生成时钟使能信号CLK EN,该信号馈送到ADM3065E的数据使能引脚。正好两个时钟周期(2T)后,主站开始在Tx DATA上输出命令。
该命令的长度为 6 位,后跟两个 0 位。为了控制通过收发器的数据方向,处理器在传输时将位 Tx/Rx EN 设置为高电平。
当从站准备响应时,系统进入等待状态,主站继续应用时钟,但数据线处于非活动状态。当从站准备好响应时,数据线接收数据被拉高,然后立即发送响应。在收到n位响应后,主机通过将CLK EN信号设置为低电平来停止时钟。同时,ENC CLK信号变为高电平。数据流是半双工的,组合数据线上的流量显示为 ENC 数据。
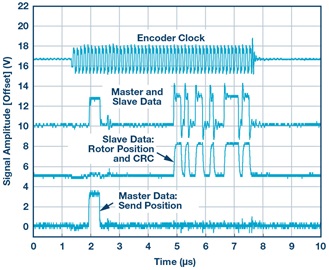
图6.EnDat 数据交换。
审核编辑:郭婷
-
收发器
+关注
关注
10文章
3390浏览量
105846 -
编码器
+关注
关注
45文章
3584浏览量
134104 -
微处理器
+关注
关注
11文章
2247浏览量
82306
发布评论请先 登录
相关推荐
增强编码器可靠性,小型化发展的编码器连接器
怎么利用元器件来增强数据通信可靠性?
用这些方法可以增强旋转编码器应用的通信可靠性和性能资料下载

增强电机控制编码器应用的通信可靠性和性能
CANopen协议编码器






 工商网监
工商网监
评论