 AGV类型及导航形式为您提供详尽解读
AGV类型及导航形式为您提供详尽解读

AGV是什么?
AGV 是(Automated Guided Vehicle)的缩写,为自动导引运输车,是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。它是一种轮式机器人。
AMR 是什么?
AMR是(Autonomous Mobile Robot)的缩写,也是自主移动机器人,不同于AGV的是,AMR可以通过自身的传感器等元器件感知周围环境并做出相应决策,譬如自动避障,安全绕行,选取最佳路径。同样也属于轮式机器人。通常其多采用激光导航或视觉及混合导航形式。
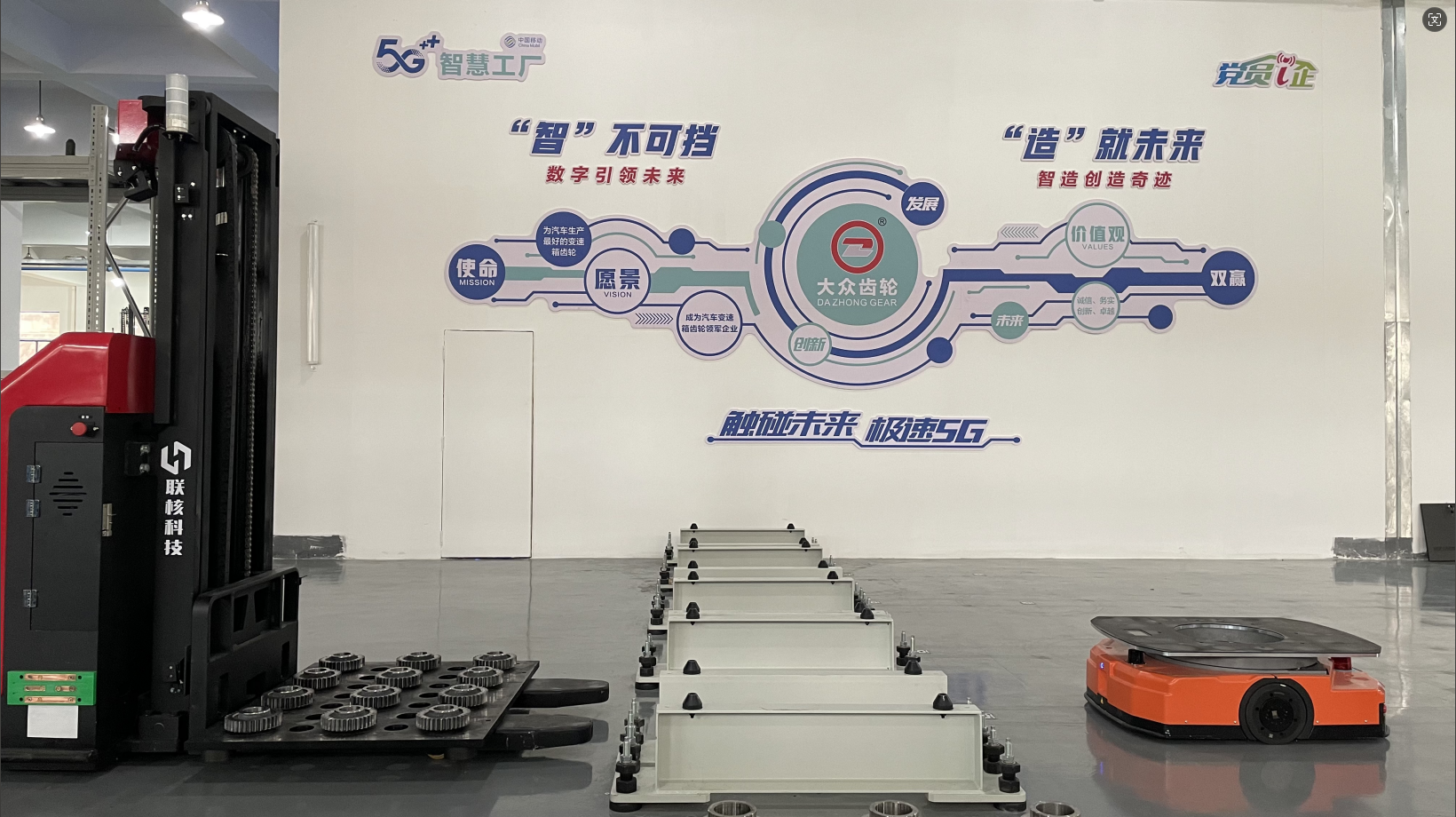
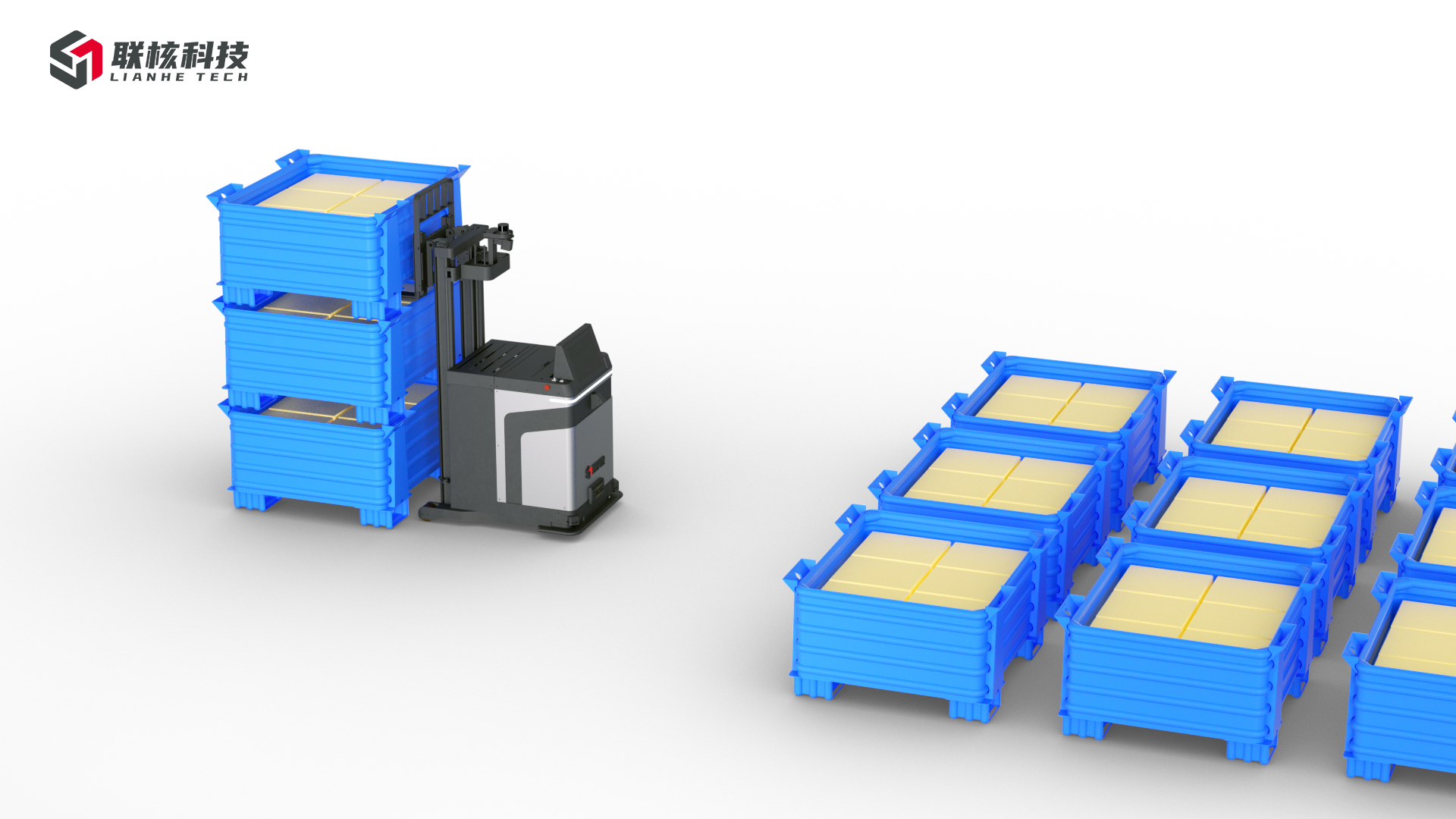
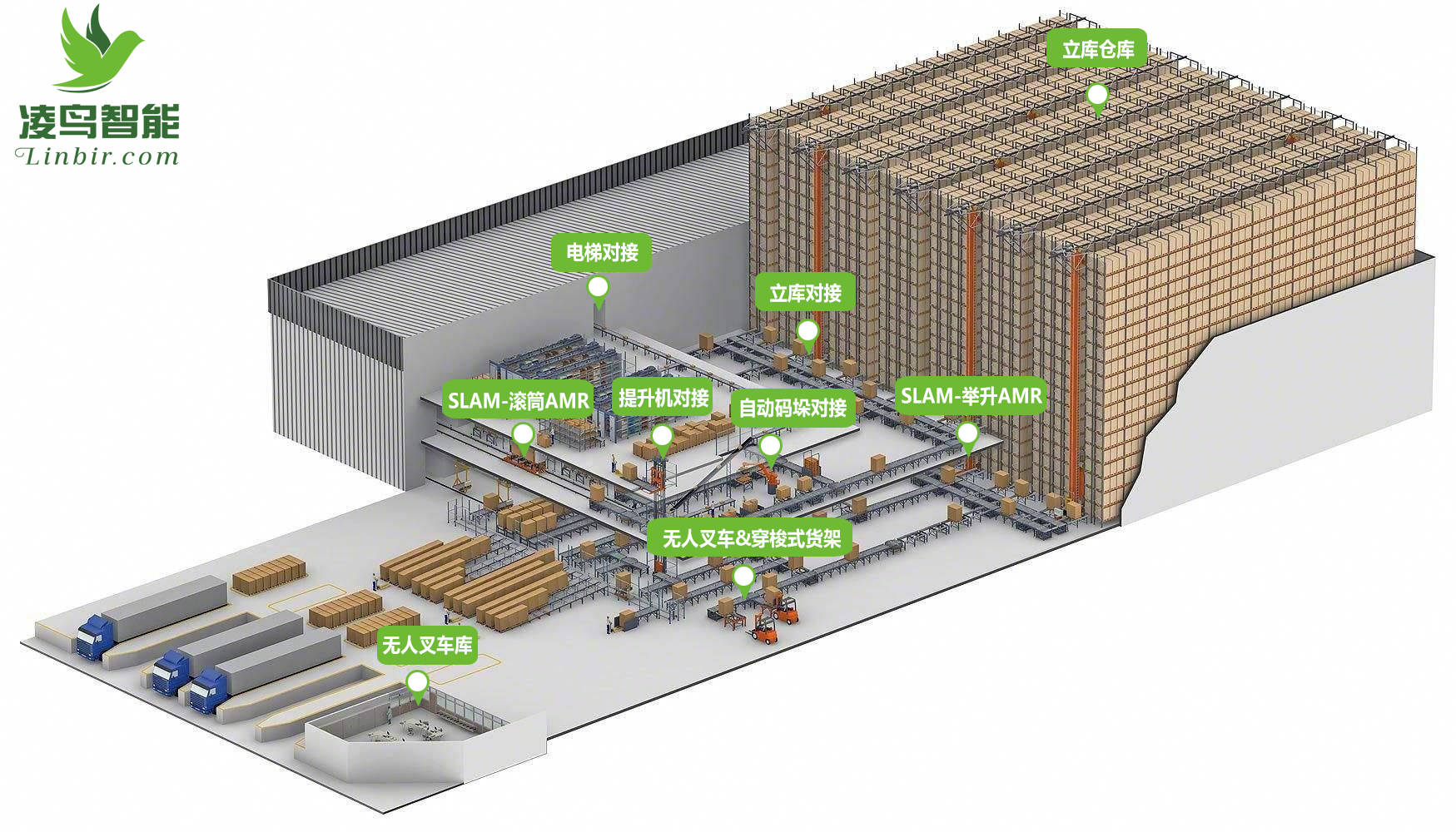
AGV应用场景图
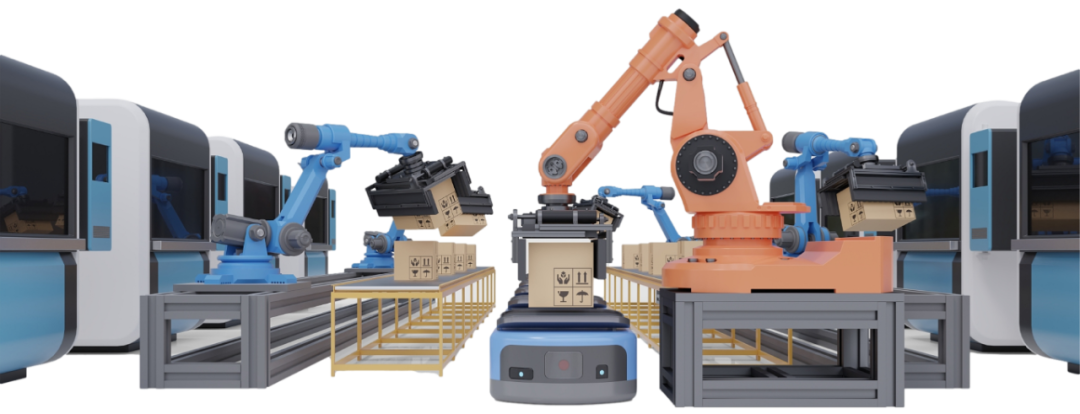

搬运型AGV是将传统各类搬运装卸工具实现电驱动化和自动化,实现无人/智能搬运装卸,主要用来自动化搬运装卸各类物料。
搬运型AGV主要由AGV车体、移载装置及控制装置等部分组成。
搬运型AGV的车型形式很多,通常有潜伏牵引式(单向、双向、全向)、尾部牵引式、背负承载式(平板式、剪刀叉举升式、托盘举升式、整体举升式)、输送承载式(单层输送式、单层举升输送式、单层多维输送式、多层输送式)、叉举承载式(叉车式、叉举式、卷料叉举式、叉车)等。
装配型AGV与搬运型AGV区别在哪?
装配型AGV与搬运型AGV区别在于功能的复杂化,能处理装货、卸载等复杂的动作,再进行物品搬运。典型的装配型AGV有机械手AGV、滚筒AGV、叉车式AGV、升降平台式AGV等。这些AGV类型都对基础车体进行了改良,增加一些功能,从而实现一系列复杂动作。
装配型AGV的优势:
装配型AGV的自动化程度比搬运型更高,可完全解放劳动力,实现搬运、装卸功能一体化。站点之间AGV进行搬运,每到一个站点停靠都可进行货物的装货和卸载。可与生产流水线、锟道等生产系统对接,把锟道、生产线上完成的物品装配到AGV上再进行转移运送。装配型AGV一般属于重载式AGV,因此车体设计通常比较大,适用于汽车等大型产品的移载运送。
磁条导航是一项非常成熟的技术,主要通过测量路径上的磁场信号来获取车辆自身相对于目标跟踪路径之间的位置偏差,从而实现车辆的控制及导航。磁条导航具有很高的测量精度及良好的重复性,磁导航不易受光线变化等的影响,在运行过程中,磁传感系统具有很高的可靠性和鲁棒性。磁条一旦铺设好后,维护费用非常低,使用寿命长,且增设、变更路径较容易。磁条需要预先部署规划路径且易被破损,易吸引金属物质导致AGV设备故障。
在线路上离散铺设QR二维码,通过AGV车载摄像头扫描解析二维码获取实时坐标。二维码导引方式也是目前市面上最常见的AGV导引方式,二维码导引+惯性导航的复合导航形式也被广泛应用,亚马逊的KIVA机器人就是通过这种导航方式实现自主移动的。这种方式相对灵活,铺设和改变路径也比较方便,缺点是二维码易磨损,需定期维护。
惯性导航是在AGV上安装陀螺仪,利用陀螺仪可以获取AGV的三轴角速度和加速度,通过积分运算对AGV进行导航定位,惯性导航优点是成本低,短时间内精度高,但这种导航方式缺点也特别明显,陀螺仪本身随着时间增长,误差会累积增大,直到丢失位置,堪称是“绝对硬伤”。使得惯性导航通常作为其他导航方式的辅助。
磁钉导航是通过磁导航传感器检测磁钉的磁信号来寻找行进路径,只是将原来采用磁条导航时对磁条进行连续感应变成间歇性感应,因此磁钉之间的距离不能够过大,且两磁钉间AGV处于一种距离计量的状态,在该状态下需要编码器计量所行走的距离。其次,磁钉导航所用控制模块与磁条导航控制模块相同。对环境要求低,一般配合惯导控制,但施工成本高,挖孔预埋,灵活性差,后期变更成本高。
通过在AGV行驶路径的周围安装激光反射板,AGV通过发射激光束,同时采集由反射板反射的激光束,来确定其当前的位置和方向,并通过连续的三角几何运算来实现AGV的导航。
目前激光导航技术已经成为国内外AGV厂商的主流方案,由于其定位精度高、线路变更灵活、导航技术成熟等等因素导致激光导航已经普及。激光导航需要提前按照一定要求铺设反射板,成本较高,适用于周边无遮挡的作业环境。
电磁导航是较为传统的导航方式之一,目前仍被采用,它是在AGV的行驶路径上埋设金属线,并在金属线加载导引频率,通过对导引频率的识别来实现AGV的导航功能。该导航技术类似于磁条导航,由于该导航技术美性不足、路径变更困难等缺点,该技术方案逐渐被AGV厂商放弃,但是特定地场合也比较适合该导航技术,具体根据AGV工作环境要求。比如高温环境下、线路平直性要求严格等要求。
轮廓导航是目前AGV最为先进的导航技术,该技术利用二维激光扫描仪对现场环境进行测量、学习,并绘制导航环境,然后进行多少测量学习,修正地图进而实现轮廓导航功能。利用自然环境(墙壁、柱子以及其它固定物体)进行自由测距导航根据环境测量结果更新位置。轮廓导航算法更复杂,成本较高,调度方面较为复杂,增加系统冗余。
视觉导航也是基于SLAM算法的一种导航方式,这种导航方式是通过车载视觉摄像头采集运行区域的图像信息,通过图像信息的处理来进行定位和导航。视觉导航具有高灵活性,适用范围广和成本低等优点,但是目前技术还不够成熟,识别地面纹理信息较长。利用视觉系统快速准确地实现路标识别这一技术仍处于瓶颈阶段。
色带导航通过视觉传感器(或组合式的色标传感器),检测事先铺设在地面的色带与AGV的相对位置,从而使小车沿既定路线(色带)行驶。
荧光导航的路线是以荧光颜料制作的色带。荧光导航传感器发射经调制的紫外光,荧光色带上的荧光物质会被紫外光激发,发射出波长在可见光光谱范围内(约420 nm 到750 nm)的可见光。荧光导航传感器会接收此光线,从而测量判断色带与AGV的相对位置,从而使小车沿既定路线行驶。
铺设容易改路径,成本低,易被污染,环境要求高,地面平整性要求高。
测距导航是利用激光二位扫描仪对其周围环境进行扫描测量,获取测量数据然后结合导航算法实现AGV导航。该导航传感通常使用具有安全功能的安全激光扫描仪实现,由于采用安全激光扫描仪可以实现安全功能的同时也能够实现导航测量功能。采用测距导航技术的AGV可以实现进入集装箱内部进行自动取货送货功能。
自然导航也称为SLAM激光导航,是一种无需使用反射板的自然导航方式,它不再需要通过辅助导航标志(二维码、反射板等),而是通过工作场景中的自然环境,如:仓库中的柱子、墙面、货架等作为定位参照物以实现定位导航。相比于传统的激光导航,它的优势是制造成本较低。
混合导航是多种导航的集合体,该导航方式是根据现场环境的变化应运而生的。由于现场环境的变化导致某种导航暂时无法满足要求,进而切换到另一种导航方式继续满足AGV连续运行。

苏州凤凰动力工业有限公司(简称:凤凰动力)是国内较早从事专业AGV/AMR舵轮、电驱动轮总成研发与生产的企业,主要产品包括卧式驱动轮、卧式舵轮、立式驱动轮、立式舵轮、重载AGV曲轴脚轮、高精密型脚轮万向轮。电驱动轮及舵轮功率范围0.2KW~50KW、轮径范围150mm~600mm、单只载重范围300KG~20000KG,几乎涵盖了工业领域各类电驱动移动设备的需求,客户选型游刃有余,并且还可以满足客户个性化的定制需求,为客户打造专属化产品。
自创立以来,凤凰动力已经为超过1800家客户提供了完整的电驱动解决方案,涉及军工、航运码头、机场、建筑、钢铁、汽车、工业车辆、纺织、机械制造、电子制造等多个行业。取得各种专利40多项,建立起电机、齿轮、驱动控制系统等核心零部件优秀的供应链基础,完成了标准化、模块化、定制化、集成化、系统化、智能化初步架构,为提供优质的OEM、ODM整体解决方案打下了坚实的基础。
审核编辑黄宇
-
激光
+关注
关注
19文章
3307浏览量
65112 -
AGV
+关注
关注
27文章
1367浏览量
41428
发布评论请先 登录
相关推荐
AGV小车的工作原理是什么?
AGV激光导航定位技术综述与发展趋势

TomTom为依维柯商用车提供增强的导航
如何选择让自己满意(适合)的agv小车?纯干货分享
AGV激光导航定位技术与构建地图

智能呼叫、激光导航、自动避障,为什么AGV机器人被需要?

凤凰动力告诉你,知道不知道的AGV类型都在这里了
解读 AGV 关键连接对物流自动化发展的意义

Agv无人叉车常见的5种导航方式大盘点!优缺点分析 哪种更适合你?
神经网络结构类型和应用实例
Agv叉车由什么构成?工作原理是什么?易损件有哪些?

AGV小车上的惯性导航模块运用——SGPM02

激光,磁性,视觉?什么是AGV最好的导航系统?
更智能更柔性化,AGV导航方式的创新与演进!






 工商网监
工商网监
评论