 基于形状记忆合金弹簧驱动柔性脊柱的仿壁虎机器人
基于形状记忆合金弹簧驱动柔性脊柱的仿壁虎机器人
大壁虎是已知质量最大的能够在墙面和天花板自由攀爬的动物,其优秀的壁面运动能力不仅得益于脚掌的黏附机制,还与骨骼结构和肢体的精细调控息息相关。在壁虎的运动中,其躯干通常采用横向摆动的运动模式,从而获得较大的运动优势。目前来看,大多数仿壁虎机器人的研究主要是基于刚性躯干,大部分学者的关注点在于如何将壁虎超凡的黏脱附机制以及空间过渡能力应用于仿壁虎机器人的足部结构,忽略了可弯曲的柔性脊柱在运动过程中的重要作用。刚性机体结构因为不具有柔顺性,缺乏变刚度特性,不易于动态调整机体的姿态,难以适应环境或速度的变化,导致仿壁虎机器人的运动性能与真实壁虎相去甚远。
近期,南京航空航天大学机电学院运动仿生与智能机器人实验室吉爱红教授课题组展示了一种基于形状记忆合金弹簧驱动柔性脊柱的仿壁虎机器人,在整体结构和几何比例上均与大壁虎的身体特征非常相似。该仿壁虎机器人共设有15个自由度(每条腿3个,脊柱3个)。为了保证机器人能够在没有冗余驱动的情况下实现自由的三维单肢运动,每条腿采用三个运动关节的设计,分别对应壁虎四肢的髋关节、膝关节以及踝关节,其中髋关节用于实现腿部的俯仰,膝关节用于实现腿部的前后摆动,踝关节用于实现足部的扭转,如图1A、1B所示。
该仿壁虎机器人的特别之处在于具有一根串联式铰链结构的柔性脊柱,由三个相同的子模块组成,每个子模块都设有一个转动关节。在该柔性脊柱的设计中,摒弃了传统的机械驱动方式,选择使用智能材料中的形状记忆合金(SMA)弹簧作为驱动器,成对安装在柔性脊柱的两侧,利用电加热方式对其进行致动,并通过差动式设计驱动柔性脊柱的侧向偏转,如图1C、1D所示。在机器人的运动中,通过控制两侧SMA弹簧的变形程度来改变柔性脊柱的侧向偏转角度,同时配合四肢的规律性摆动,实现机器人躯干与四肢的协同运动,相比于刚性躯干的仿壁虎机器人,不仅提高了直行时的移动速度,还减小了转弯时的转弯半径,大大增强了仿壁虎机器人的运动灵活性。
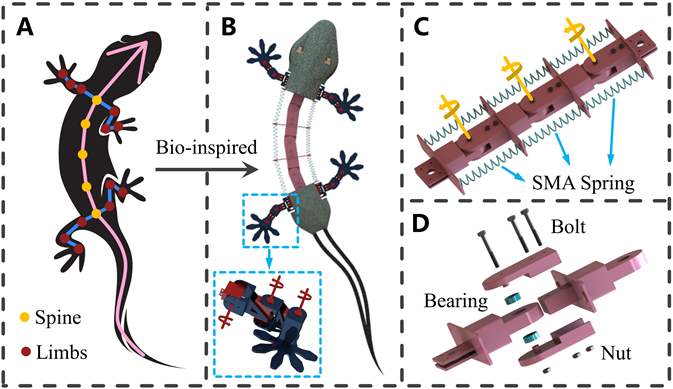
图1 (A)生物壁虎的身体结构;(B)具有柔性脊柱的仿壁虎机器人,腿部机构采用三自由度设计;(C)由三对 SMA弹簧驱动的串联式铰链结构的柔性脊柱;(D)柔性脊柱单节结构爆炸图。
SMA弹簧作为仿壁虎机器人柔性脊柱的核心元件,其驱动特性直接决定了机器人的运动性能。团队通过定长加热实验测定了SMA弹簧在不同预拉伸长度下输出轴向驱动力的实际能力,并通过自由变形加热实验测定了SMA弹簧驱动时产生的收缩变形量与自身温度之间的关系,确定了SMA弹簧发生奥氏体相变的温度范围,然后基于牛顿热平衡方程,建立了通过PWM信号控制电加热SMA弹簧的温升模型,分析了在不同电加热功率下SMA弹簧的温度变化情况。具体实验结果如图2所示。
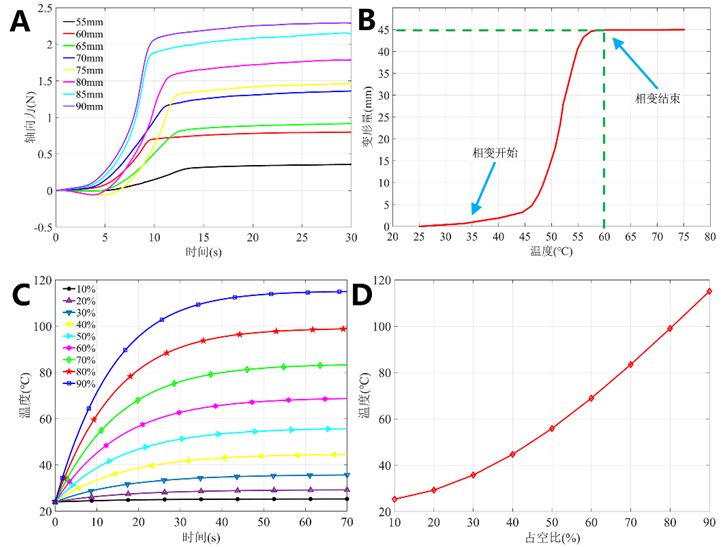
图2 (A)不同预拉伸长度下SMA弹簧的轴向驱动力变化;(B)SMA弹簧变形量与温度之间的关系;(C)不同占空比下的温升曲线;(D)最大稳定温度与占空比关系。
要模拟壁虎躯干的侧向摆动模式,首先要研究其在一个步态周期内的动作特征,采用配有高速摄像机的光学式运动捕捉系统记录了壁虎的运动,并用荧光点标记了壁虎躯干和四肢的关节位置,壁虎在一个小跑步态周期中的形态如图3A所示。当机器人以躯干侧向摆动的运动模式前进时,除了进行小跑步态所必须执行的四肢动作外,还应该模拟两个运动行为,分别是:(1)脊柱的左右扭转;(2)肩带和骨盆带的相反方向旋转,并保证肩带中心与骨盆带中心的连线始终沿运动方向不变。在一个步态周期内,壁虎躯干的肩带旋转角和骨盆带旋转的单侧最大波动范围分别为33.56 ± 3.01 °,33.22 ± 1.72 °。肩带/骨盆带旋转与脊柱偏转同相位,且呈现平滑的单峰值曲线,表示三者的协调一致才产生了躯干稳定的侧向摆动。在本研究中,考虑到单独控制柔性脊柱某一侧的单根SMA弹簧将带来严重的滞后性,因此认为脊柱前后部分的弯曲程度相同,同侧SMA弹簧在时间序列上表现出相同的行为特征。
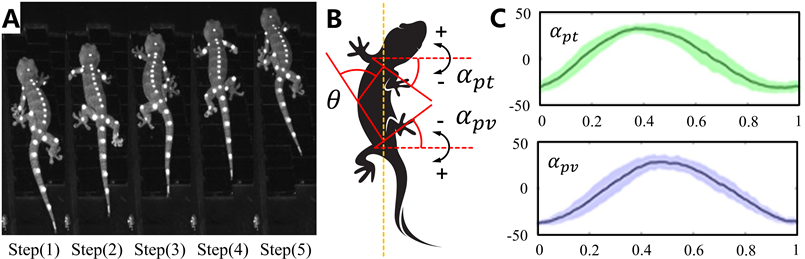
图3 (A)壁虎在一个小跑步态周期中的姿势;(B)壁虎躯干中肩带偏转角和骨盆带偏转角的定义;(C)一个周期内肩带/骨盆带偏斜角度的变化。
根据壁虎形态学和运动学的观察结果,提出三个简化理论分析的假设:(1)躯干侧向摆动时,肩带和骨盆带的旋转在时间和空间上对称;(2)步态转换时刻,四肢各对应关节的角度变化量一致,步幅为恒定值,运动速度则依赖于肢体摆动频率;(3)柔性脊柱各旋转关节的旋转方向和数值相同;(4)忽略尾巴对运动的影响。基于以上假设,建立了仿壁虎机器人柔性脊柱与四肢的协同模型,如图4所示。通过控制脊柱关节与四肢关节的相互协调,能够使仿壁虎机器人的躯干侧向摆动表现出驻波形态,脊柱呈现单峰类C型曲线,且所有的脊柱关节几乎在同一时刻到达位移极值。

图4 仿壁虎机器人柔性脊柱与四肢的协同运动模型。
制作的仿壁虎机器人样机如图5所示,柔性脊柱和腿部机构是由树脂材料通过3D打印技术制成的轻量化零件,头部和尾部支撑板以及尾巴由2mm厚的碳纤维板材切割加工,电子控制板分别布置在头尾支撑板上。机器人整体质量为1.03kg,长度和宽度分别为970mm和162mm。为了测试机器人是否满足理论预期,根据运动模型用荧光点标记了仿壁虎机器人的身体特征,在实验平台周围布置了四个高速摄像机,利用多个摄像机构成的系统确定特征标记点在整个空间区域的三维坐标信息,然后通过直接线性变换方法获得任意时刻这些特征点的绝对坐标,并据此模拟出所有标记点的运动轨迹。
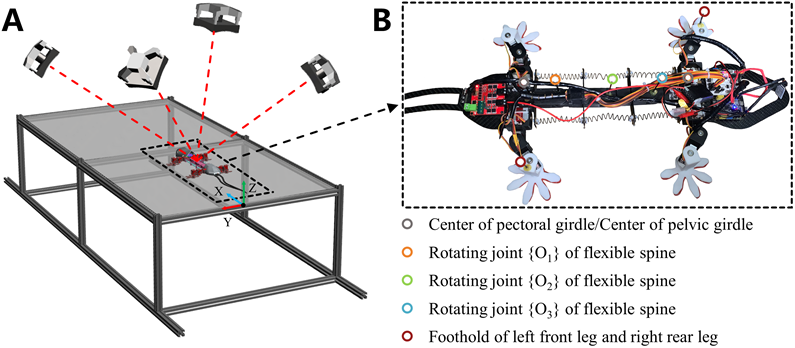
图5 (A)运动实验平台;(B)仿壁虎机器人样机。 根据实验数据分析,当仿壁虎机器人采用刚性脊柱运动时,它的平均步幅为81.63 mm,移动速度为20.35 mm/s,而当机器人采用柔性脊柱运动时的平均步幅为199.88 mm,移动速度为44.89 mm/s。这个结果符合理论预期,并证实了躯干的侧向摆动对运动步幅有着非常积极的影响。同时还进行了仿壁虎机器人转弯运动的实验,结果显示,当机器人采用刚性脊柱时,其转弯半径约为620 mm,而采用柔性脊柱时的转弯半径约为270 mm。可见,柔性脊柱大幅减小了机器人进行转弯运动时的转弯半径,很大程度上提升了机器人的灵活性。
未来,具有柔性脊柱的仿壁虎机器人将得到不断完善。团队将进一步在SMA弹簧的开环电加热控制基础上增加反馈补偿,减小SMA弹簧的非线性迟滞效应,以提高柔性脊柱偏转的位置精度。此外,在仿壁虎机器人的分析模型和设计中,团队还将考虑其足端黏附机制,以赋予其良好的爬坡能力。
以上研究成果以“A Gecko-inspired Robot with a Flexible Spine Driven by Shape Memory Alloy Springs”为题,发表在Soft Robotics上。南京航空航天大学硕士研究生邱镓辉为论文第一作者,南京航空航天大学吉爱红教授和朱孔军教授为论文共同通讯作者。该研究工作得到中国国家重点研发项目(2019YFB1309600)和国家自然科学基金(编号No. 51861135306)的资助。
审核编辑 :李倩
-
驱动器
+关注
关注
52文章
8242浏览量
146408 -
机器人
+关注
关注
211文章
28440浏览量
207195
原文标题:南航吉爱红教授课题组《Soft Robotics》:基于形状记忆合金弹簧驱动柔性脊柱的仿壁虎机器人
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
模仿蚯蚓开发软体机器人
工业机器人结构、驱动及技术指标详解
DF-1仿人机器人怎么样?
仿壁虎机器人可在极端环境作业 能做90度爬壁运动
作用太空任务的壁虎机器人
形状记忆合金的简介、原理和应用解析
仿壁虎机器人地壁过渡步态规划
基于形状记忆合金的软体机器人研究分析
形状记忆合金的研究现状与应用
奔跑速度可达到每秒70倍体长的新型微型机器人
柔性机器人与刚性机器人区别与联系






 工商网监
工商网监
评论