 小型平行履带底盘实现红外避障功能
小型平行履带底盘实现红外避障功能
1. 功能说明
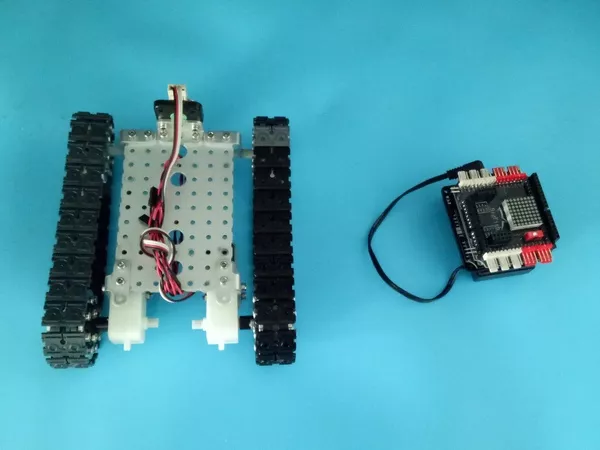
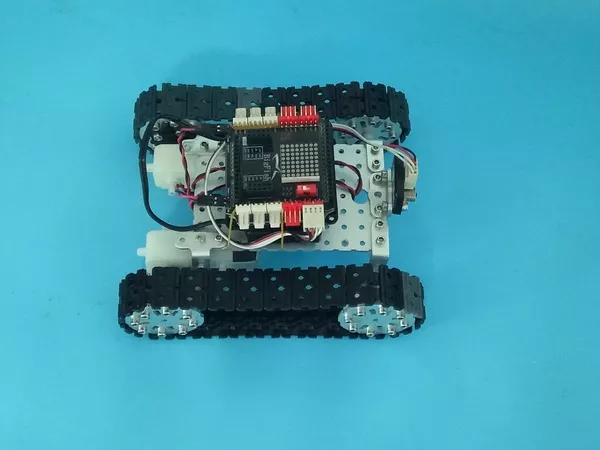
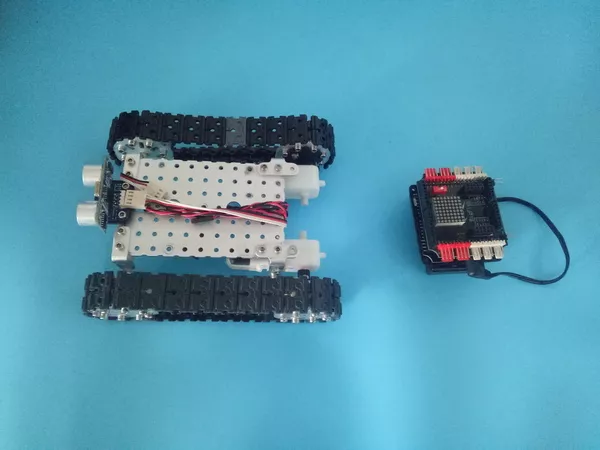
本实验使用的样机为R026a样机小型平行履带底盘。在样机前方安装1个 近红外传感器 ,如果遇到障碍,机器人后退,否则机器人前进,实现机器人避障的效果。
2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra(兼容Arduino Uno) |
| 扩展版 | Bigfish2.1 |
| 传感器 | 近红外传感器 |
| 电池 | 7.4V锂电池 |
两个直流电机连在D5,D6以及D9,D10接口上;近红外传感器连在A4接口上。
3. 示例程序
编程环境:Arduino 1.8.19
编写并烧录以下程序(infrared_car.ino),该程序将实现红外避障的动作【例程源代码资料下载详见 https://www.robotway.com/h-col-114.html】
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2023-02-10 https://www.robotway.com/ ------------------------------ 实验接线:两个直流电机接口的针脚号分别为D5,D6以及D9,D10;近红外传感器连在A4接口上 ------------------------------------------------------------------------------------*/ void setup() { pinMode( 18, INPUT); pinMode( 5 , OUTPUT); pinMode( 6 , OUTPUT); pinMode( 9 , OUTPUT); pinMode( 10 , OUTPUT); } void loop() { //如果传感器遇到障碍,后退,否则前进 if (!( digitalRead(18) )) { digitalWrite( 5 , HIGH ); digitalWrite( 6 , LOW ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , LOW ); } else { digitalWrite( 5 , LOW ); digitalWrite( 6 , HIGH ); digitalWrite( 9 , LOW ); digitalWrite( 10 , HIGH ); } }
审核编辑黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2553文章
51511浏览量
757256 -
机器人
+关注
关注
211文章
28745浏览量
208907 -
红外
+关注
关注
8文章
744浏览量
95028
发布评论请先 登录
相关推荐
请问循迹避障当中的四路循迹模块与红外寻光&避障模块有什么区别?
下二者的区别,尤其是在功能实现方向。(其中红外寻光¥避障模块自带一个光敏电阻)图片附上(从上往下第一个是四路循迹,第二个是
发表于 02-01 10:53

小型平行履带底盘实现超声避障功能
1. 功能说明 本实验使用的样机为R026a样机小型平行履带底盘。在样机前方安装1个 超声波传感器 ,如果遇到障碍,机器人后退、转向,






 工商网监
工商网监
评论