 小型平行履带底盘实现双灰度循迹功能
小型平行履带底盘实现双灰度循迹功能
1. 功能说明
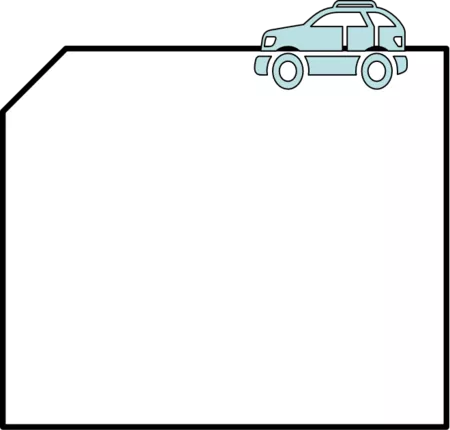
在小型平行履带底盘样机上安装2个 灰度传感器 ,实现机器人沿指定路线进行运动的效果。

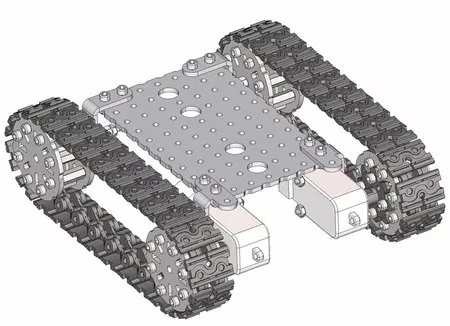
2. 使用样机
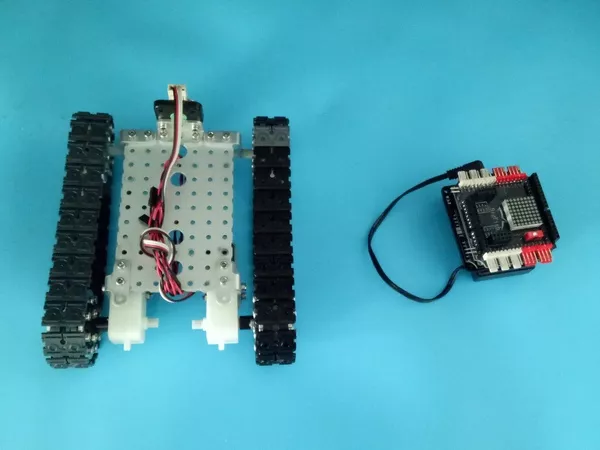
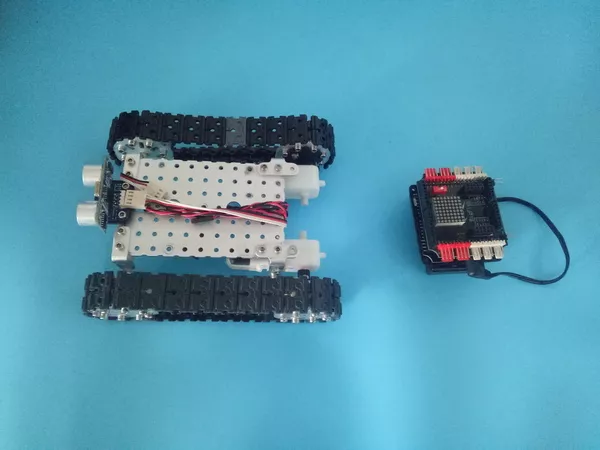
本实验使用的样机为R026a样机。
3. 功能实现
3.1 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1 |
| 传感器 | 灰度传感器 |
| 电池 | 7.4V锂电池 |
3.2 编写程序
编程环境:Arduino 1.8.19
编写并烧录以下程序(2gray_blackline.ino),该程序将实现演示动图中的动作【例程源代码资料下载详见 https://www.robotway.com/h-col-114.html】
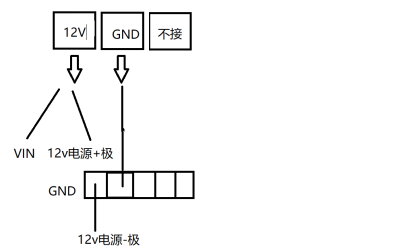
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2023-02-09 https://www.robotway.com/ ------------------------------ 实验接线:两个直流电机接口的针脚号分别为D5,D6以及D9,D10;灰度传感器连在A0、A4接口上 ------------------------------------------------------------------------------------*/ int i=0; void Forward(); void Back(); void Turn_left(); void Turn_right(); void Speed_up(); void Slow_down(); void setup() { // put your setup code here, to run once: pinMode(A0,INPUT); pinMode(A4,INPUT); pinMode(9,OUTPUT); pinMode(10,OUTPUT); pinMode(5,OUTPUT); pinMode(6,OUTPUT); Serial.begin(9600); } void loop() { // put your main code here, to run repeatedly: int a=digitalRead(A0); int b=digitalRead(A4); Serial.println(a); Serial.println(b);//Here is serial monitor,you will kown in later learning if(a==0&&b==0) Forward(); if(a==1&&b==0) Turn_left(); if(a==0&&b==1) Turn_right(); } void Forward()// { analogWrite(9,120); analogWrite(10,0); analogWrite(5,120); analogWrite(6,0); delay(50); } void Back() { digitalWrite(9,LOW); digitalWrite(10,HIGH); digitalWrite(5,LOW); digitalWrite(6,HIGH); delay(4000); } void Turn_left() { digitalWrite(9,0); digitalWrite(10,0); digitalWrite(5,100); digitalWrite(6,0); delay(50); } void Turn_right() { digitalWrite(9,100); digitalWrite(10,0); digitalWrite(5,0); digitalWrite(6,0); delay(50); } void Speed_up() { for(i=0;i<=255;i+=5) { analogWrite(9,i); analogWrite(10,0); analogWrite(5,i); analogWrite(6,0); delay(50); }//speed up } void Slow_down() { for(i=255;i>=0;i-=5) { analogWrite(9,i); analogWrite(10,0); analogWrite(5,i); analogWrite(6,0); delay(50); } }
审核编辑黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2553文章
51511浏览量
757256 -
机器人
+关注
关注
211文章
28745浏览量
208907
发布评论请先 登录
相关推荐

履带机器人 金属底盘
` 本帖最后由 威凯-智控 于 2012-8-14 23:28 编辑
今天给大家分享一个全金属的履带机器人底盘准备最履带机器人的朋友们,可以一起交流一下机器人疯狂爱好者 让思维沸腾起来 让智慧行动起来 共同创造机器人的精彩!
发表于 08-14 23:25
履带底盘的结构部分
写在前面:看着网上那些履带底盘,怎么看怎么不舒服,还是决定自己做。这样就带来一个很大的问题,就是很多结构件都要用3D打印。我自己有3D打印机,下面不但会给出设计,还会给出实物照片。但是,对于没有3D
发表于 02-19 03:54
循迹智能小车是由哪些部分组成的
循迹智能小车 循黑线文章目录循迹智能小车 循黑线硬件菜单硬件使用硬件组装程序设计前的理解程序代码硬件菜单单片机型号:STC16F40K1284路红外循迹模块小车底盘套件(一个
发表于 07-14 06:56

使用以双灰度传感器实现的曲线循迹以及矩形循迹的资料说明
在这次课程中,我们小组选定的课题是循迹小车,在长达数周的辛苦付出中,我组小车已能实现的功能有1.红遥控小车2.以灰度传感器实现矩形
发表于 12-23 08:00
•12次下载

小型双节履带底盘的制作
1.运动功能说明 双节履带车可以通过两个驱动轮的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能,并可通过舵机关节模块进行小臂的


小型三节履带底盘的制作
双节履带车可以通过两个驱动轮的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能,并可通过舵机关节模块进行小臂的抬起和落下。通过底盘
如何让小型双轮差速底盘实现双灰度循迹功能?
1. 功能说明 在机器人车体上安装2个 灰度传感器 ,实现机器人按照下图所指定的路线进行导航运动,来模拟仓库物流机器人按指定路线行进的工作过程。 2. 使用样机 本实验使用的样机为

双轮差速底盘三灰度循迹功能的实现
1. 功能说明 在小型双轮差速底盘样机前方安装3个 灰度传感器 ,实现机器人沿下图所指定的跑道路线进行运动的效果。 2. 使用样机
小型平行履带底盘实现红外避障功能
1. 功能说明 本实验使用的样机为R026a样机小型平行履带底盘。在样机前方安装1个 近红外传感器 ,如果遇到障碍,机器人后退,否则机
小型平行履带底盘实现超声避障功能
1. 功能说明 本实验使用的样机为R026a样机小型平行履带底盘。在样机前方安装1个 超声波传感器 ,如果遇到障碍,机器人后退、转向,





 工商网监
工商网监
评论