 关于 BLV 系列更新的 3 件事
关于 BLV 系列更新的 3 件事
BLV 系列是我们提供的两种直流输入无刷电机速度控制系统之一。带霍尔效应传感器反馈的无刷电机提供恒定扭矩、宽速度范围和速度调节,而 BLV 驱动器则提供专为移动机器人设计的独特功能,例如低电量运行和斜坡运行。
BLV 系列无刷齿轮电机和驱动器的图像如下所示。在右侧,我们展示了带有预组装 FR 减速机的 BLV 减速电机,这是一种节省空间的扁平式空心轴减速机,专为高扭矩应用而设计。左侧的专用电机驱动器控制电机速度和操作。显示了端子侧,其中连接了所有电线。可以配备可选的平行轴减速机或电磁制动器。
这是原始的 BLV 系列 200 W / 400 W 系列及其一些规格。
< >
| 1. 新100W型 |
| 100 W 平行轴齿轮电机 | 100 W FR 扁平空心轴齿轮电机 |
 |
|
在听取客户的反馈时,我们意识到 AGV/AMR/移动机器人和物料搬运行业对紧凑型 100 W 齿轮电机的需求量很大。因此,我们将 BLV 系列及其AGV 特定功能扩展到 100 W 范围。产品阵容中新增了 100 W 型。虽然外观保持不变,但规格略有不同。
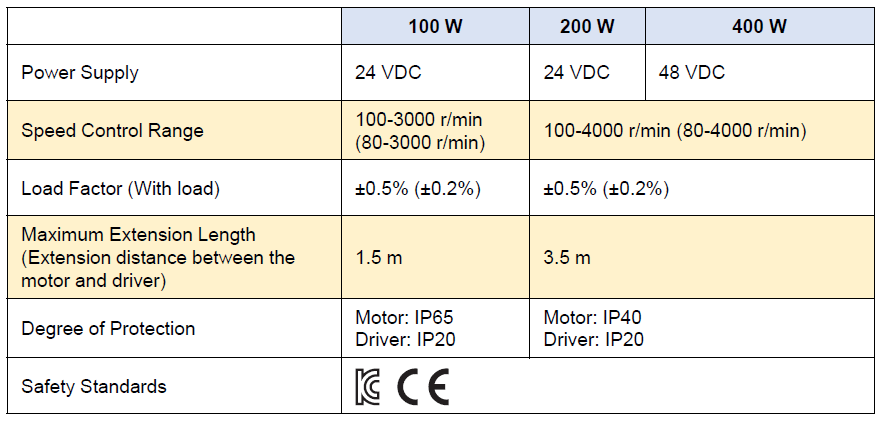
差异
100 W 型号仅接受 24 VDC,因此不接受 48 VDC。
速度范围较窄,为 10~3000 r/min(模拟)或 80~3000 r/min(数字)。
电机和驱动器之间的最大延伸距离降低到1.5米。
电机的 IP 等级从 IP40 提高到 IP65。
相似之处
速度调节保持在 +/-0.5%(模拟)或 +/-0.2%(数字)不变。
驱动器的 IP 等级保持在 IP20。
安全标准保持不变。
这是 100 W、200 W 和 400 W BLV 系列型号的比较表。
提供 0.2 m(0.7 英尺)或 1.0 m(3.3 英尺)两种电缆长度。但是,100 W 型不提供圆轴无齿轮版本。
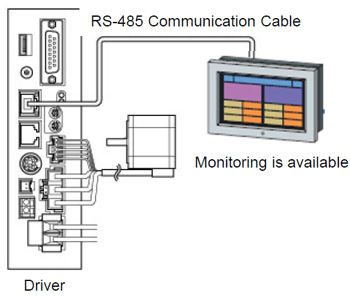
这是整体系统配置的样子。还提供安装支架、联轴器和外部速度电位器等附件。
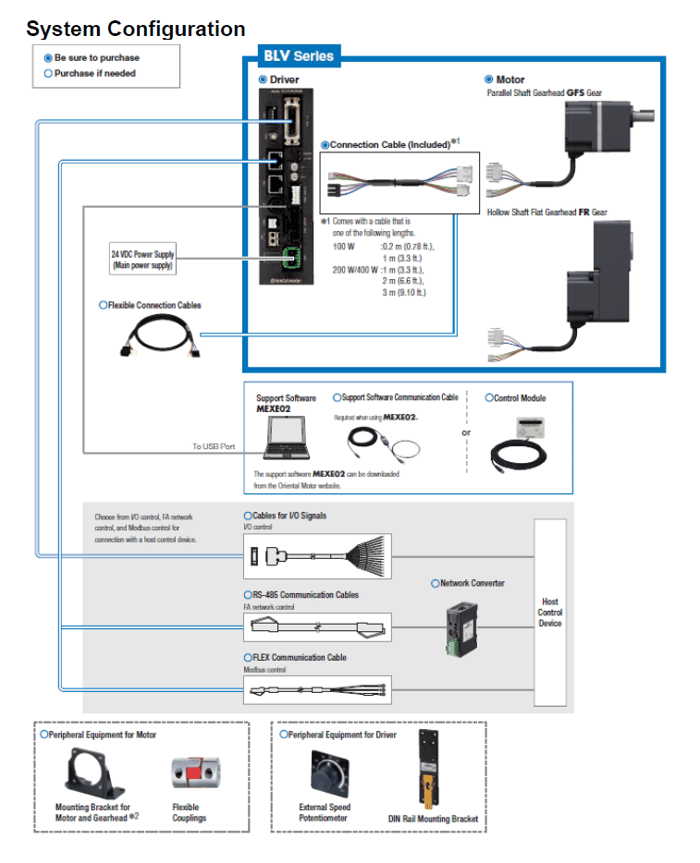
请注意,除了上图中的 OPX-2A“控制模块”外,MEXE02 支持软件还显示为一种对驱动器上存储的数据进行编程的新方法。接下来,我们将介绍 BLV 系列的第二个主要设计变更。
| 2. 与 MEXE02 支持软件的兼容性 |
使用 MEXE02 支持软件轻松设置数据
MEXE02 软件提供直观的用户界面、简单的点对点运动曲线编程和监控功能。原始BLV 驱动器上存储的数据可以使用 OPX-2A 手持示教器或通过 RS-485 通过 Modbus RTU 进行编程。现在,所有功率的所有驱动程序都可以使用通用的 MEXE02 支持软件来更轻松地进行数据设置。
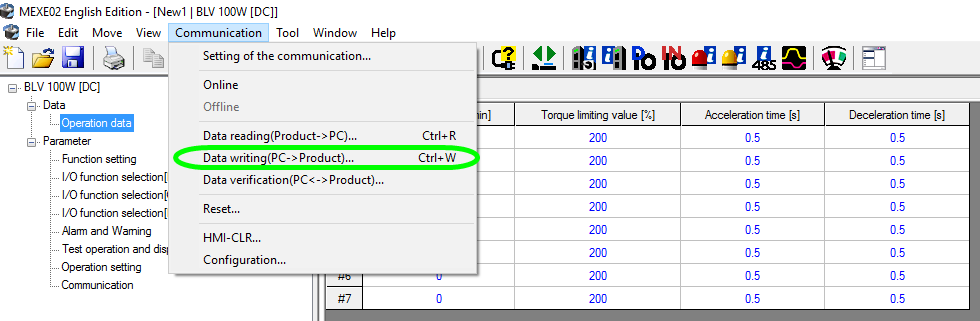
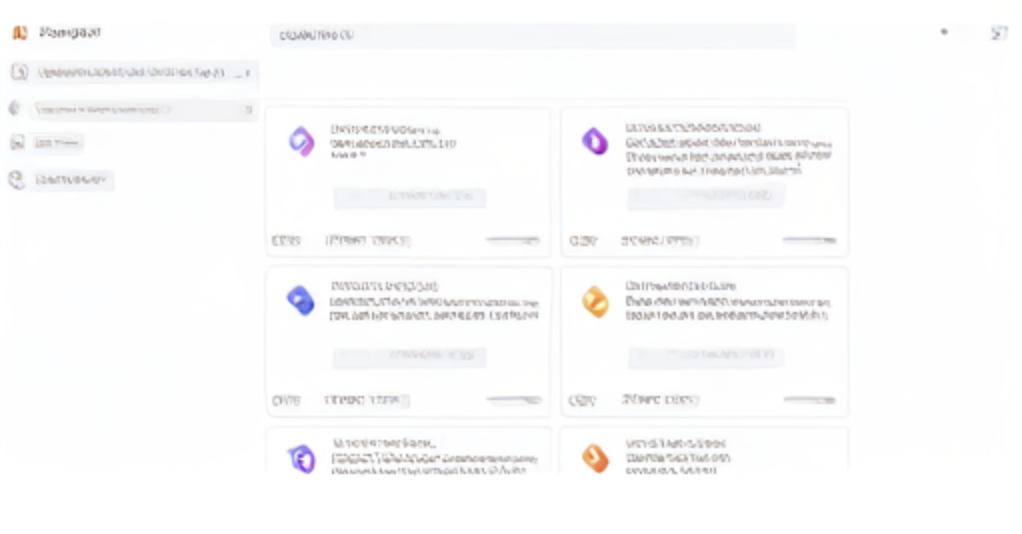
下面的屏幕截图显示了更新的BLV 驱动程序连接到 PC 时的 MEXE02 软件。需要转速[r/min]、扭矩限制值[%]、加速时间[s]和减速时间[s]。您只需输入所需的值,或使用默认值。BLV 系列提供 8 种速度配置文件。配置文件的数量对应于产品。例如,AZ 系列步进电机驱动器提供 256 种运动曲线。
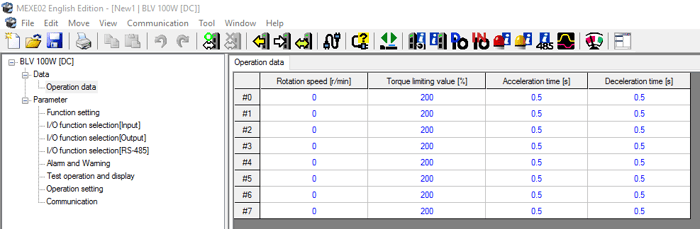
不要忘记通过执行数据写入操作来保存数据。
除了简单直观的编程,MEXE02 软件的操作示教、监控和测试功能在设置或故障排除期间非常有用。让我们回顾一下这些功能。
示教、远程操作
示教操作窗口允许操作员手动将电机移动到特定位置,以便将位置示教并存储给驱动器。可以使用方向键移动电机,选择要保存数据的数据号。 远程操作允许您测试存储在驱动器中的运动曲线,而无需连接 I/O。
下面两张截图没有连接产品,所以监控的数值显示为0。系统运行时,会有数值实时变化。在 OUTPUT 下,绿色表示输出打开,而白色表示关闭。
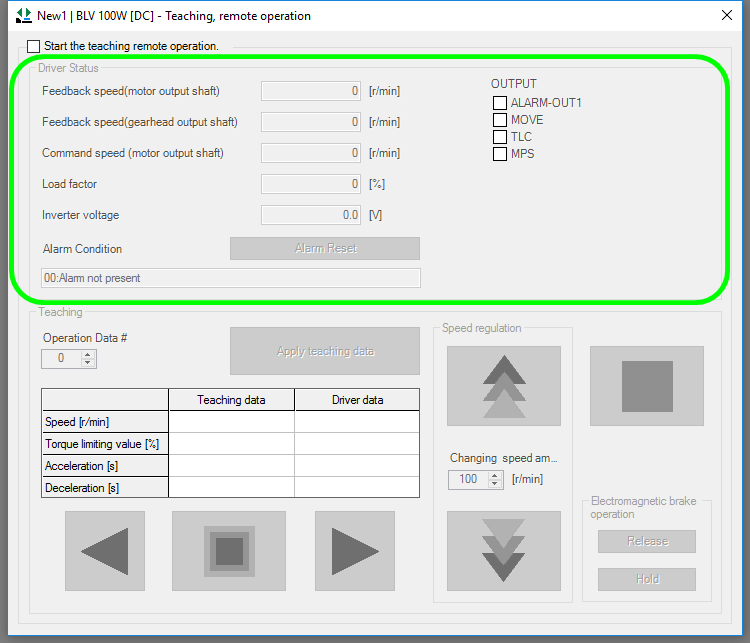
实时信息,如反馈速度(在电机和减速机输出轴)、命令速度、负载系数、逆变器电压和警报代码,显示在右上角。此处仅显示某些输出规约。高级 I/O 状态检查,请参考 I/O 测试操作。
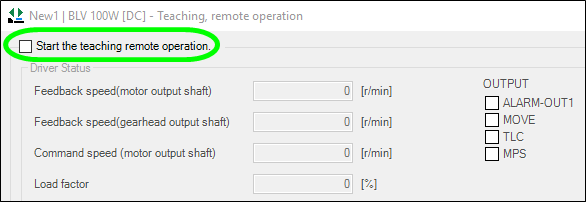
请记住选中复选框以开始任何示教、远程或监控操作。
监控操作 - 许多可用
您可以执行许多监视器操作来帮助进行故障排除和了解系统的工作原理。我们将在这里讨论一些监视器操作。
| 监控操作包括单元信息监控、状态监控、DI/O、RI/O监控(直接I/O和远程I/O)、内部I/O监控、报警监控、警告监控、RS-485通信监控和波形监视器。 |
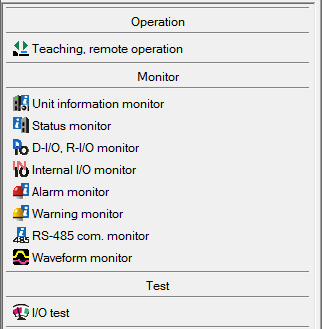 |
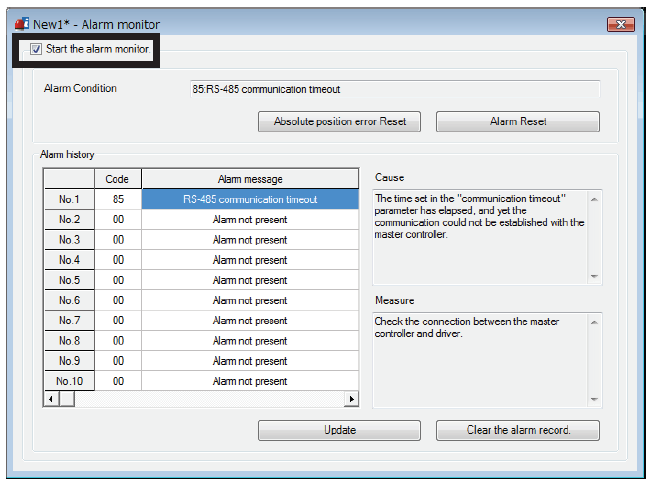
警报监视器在故障排除期间非常有用,因为它显示了导致警报的确切警报代码。它还保留多达 10 条报警记录。参考“原因”和“措施”来确定如何处理。
以下屏幕截图显示“RS-485 通信超时”。原因是“通信超时”参数中设置的时间已过,仍未建立通信。解决方法是检查主控制器和驱动程序之间的连接。有关详细信息,请参阅手册。
波形监视器在系统运行时记录 I/O 的时序。这在故障排除期间特别有用,因为您想知道它在做什么与它应该做什么。
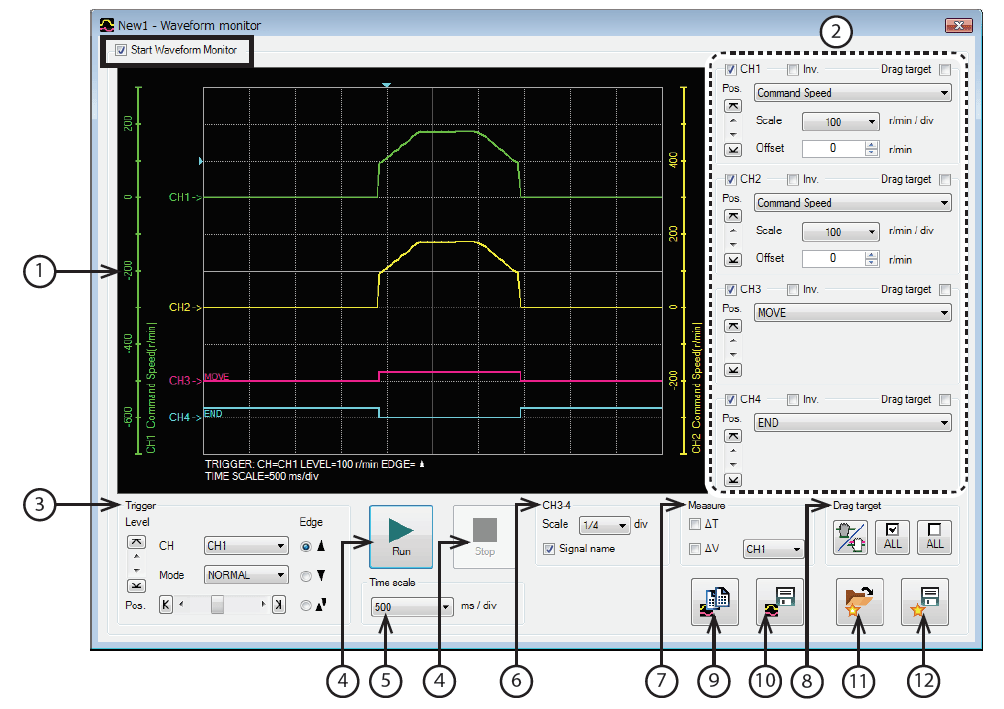
| 1个 | 测量结果绘制在该区域中。 |
| 2个 | 可以设置每个 CH 的测量条件。有关详细信息,请参阅步骤 3。 |
| 3个 | 波形测量设置:可以指定 Pos(触发位置)、Level、CH、Mode 和 Edge(检测条件)。对于“CH”,只能指定那些显示为 8 1 的 CH。 |
| 4个 | 运行:该按钮用于开始测量。停止:该按钮用于停止测量。 |
| 5个 | 可以设置测量时间范围。 |
| 6个 | 可以设置 CH3 和 CH4 的显示方式。比例:显示尺寸可以从 1/1 (100%)、1/2 (50%) 或 1/4 (25%) 中选择。信号名称:信号名称可以显示或隐藏。 |
| 7 | 测量的度量可以显示或隐藏。此外,还可以选择要测量的 CH。 |
| 8个 |
可以选择移动在窗口上绘制的波形的显示位置的方法。有以下两种移动方法。 • 移动每个通道的波形。 • 同时移动在88 2 中选择的CH 的波形。 |
| 9 | 当前显示的波形可以复制到剪贴板。 |
| 10 | 当前显示的波形可以保存到外部文件中。详情请参阅第 52 页。 |
| 11 | 可以从“收藏夹数据”加载测量设置。详情请参阅第 52 页。 |
| 12 | 测量设置可以保存为“收藏夹数据”。 |
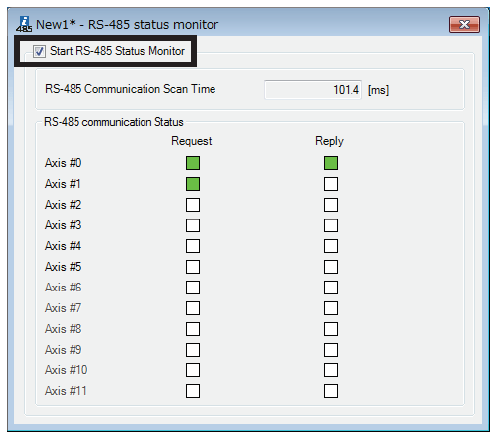
多一个。RS -485 状态监视器检查通信状态。这在尝试建立 RS-485 工业网络时特别有用。
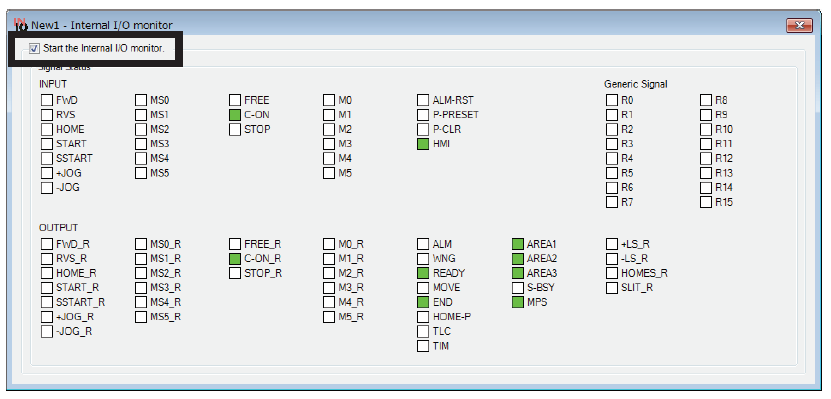
输入输出测试
I /O测试检查驱动程序I/O的实时状态;包括直接 I/O 和通过 RS-485 的远程 I/O。它在故障排除期间很有用,可以确定某些功能无法正常工作的原因。
| 3. 提高可用性 |
以及上面提到的主要设计更改。有一些新功能增加了 BLV 系列的可用性以改善机器操作。
目录输出
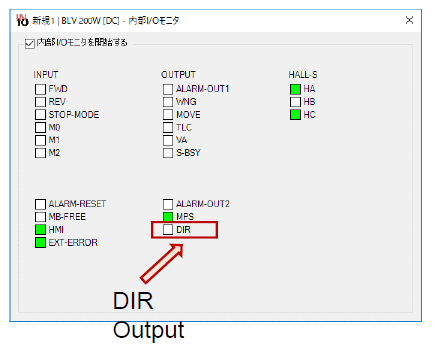
BLV 系列驱动器中添加了旋转方向输出。这允许用户远程监控电机方向。ON 表示正向,OFF 表示反向。过去,速度可以通过监控从速度输出输出的脉冲来计算。但是,无法确认旋转方向。我们在收到市场的一些反馈后添加了此功能。
负载系数监控命令
为上层 PLC 或 HMI 的主从操作添加了新的监控命令。原BLV系列驱动器在通过网络通讯运行时无法监控负载波动,因此我们对产品进行了改进,增加了更多的监控命令。新增负载率监控指令包括速度(齿轮轴)、速度小数点位置、输送机运行速度、输送机运行速度小数点位置、外部模拟速度设定、外部模拟转矩限制、外部模拟电压设定。
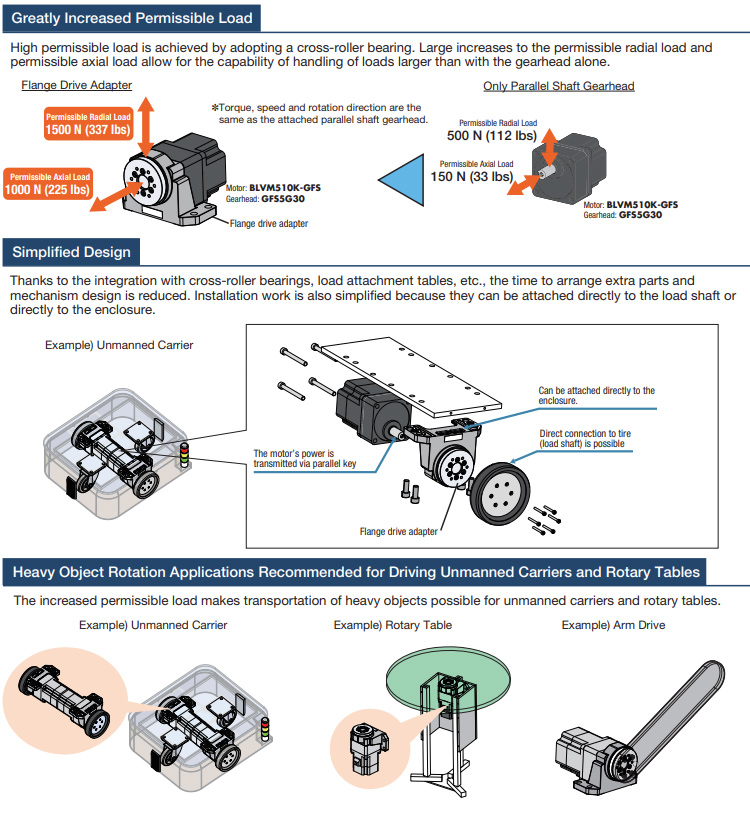
| 另外:法兰驱动适配器简化了设置并增加了径向和轴向负载 | |
|
< > < >下载法兰驱动适配器手册 |
 |
| 带走 |
BLV 100 W 平行轴齿轮电机和 FR 扁平空心轴齿轮电机已添加到 BLV 系列中,作为 AGV 和物料搬运反馈的结果。
易于使用的 MEXE02 支持软件现在与所有 BLV 系列驱动程序兼容。
新的 DIR 输出和网络监控命令增加了 BLV 系列的可用性。
BLV 系列非常适合需要直流或电池供电的无刷电机的客户、输送机制造商以及需要工业网络通信的客户。FR 减速机推荐用于电机长度也有限制的高扭矩应用。为 BLV 系列添加 MEXE02 软件支持可带来许多好处,例如轻松的数据编程和状态监控。
审核编辑黄宇
-
电机
+关注
关注
142文章
8929浏览量
145069 -
BLV
+关注
关注
0文章
6浏览量
7166
发布评论请先 登录
相关推荐
CCS LDL2系列光源绿色型号的更新产品隆重亮相

AMD官宣锐龙9000X3D系列发布计划
Simplelink™ Wi-Fi® CC3x20、CC3x3x无线更新

苹果AirPods系列固件更新,引领市场新标杆
PerfXCloud 重大更新 端侧多模态模型 MiniCPM-Llama3-V 2.5 闪亮上架
苹果Mac产品线将迎来大规模更新,M4系列芯片成主角
tc397如何使用定时器的更新事件来触发dma搬运数据?
xAI加速人工智能步伐,Grok系列大模型即将迎来重大更新
chrome插件新版本(v3版本)中的热更新,即加载更新远程js的方法探索
三星将Galaxy S20和Note 20软件更新频率降低至每季更新
SWAP是否适用于两个用于TC3xx系列控制器的独立软件?
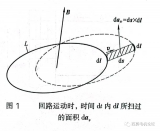
三种情况产生的感应电势分析
WT2003H语音芯片系列:通过bin文件实现板载语音更新,支持宽范围音频码率





 工商网监
工商网监
评论