 电机选型基础知识第3部分:如何计算速度、加速扭矩和RMS扭矩
电机选型基础知识第3部分:如何计算速度、加速扭矩和RMS扭矩
现在我们了解了负载转矩和负载惯量背后的计算,我们离电机选择更近了一点。您可能想知道为什么我将负载扭矩和加速扭矩计算分开。那是因为为了计算加速转矩,必须首先计算负载惯量和速度。
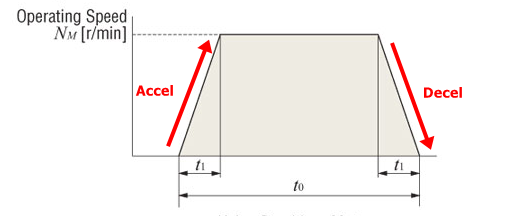
在这里,我们展示了一个典型的运动曲线,包括加速、恒速和减速区域。
从零速开始
用t1加速
在t0-t1-t1的持续时间内以Nm保持恒定速度
用t1减速
零速停止
加速/减速扭矩
与负载扭矩(恒定)相反,加速扭矩是将惯性负载加速到其目标速度或从设定速度减速到零所需的扭矩。它仅在加速(或减速)惯性负载时出现,并且可能大于或小于负载转矩。
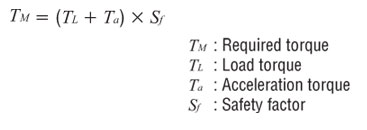
所需总扭矩
所需的总扭矩是负载扭矩和加速扭矩的总和,如下所示(有一个安全系数来覆盖我们不知道的部分)。
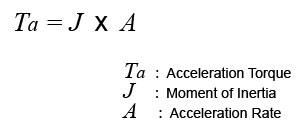
从数学上讲,加速扭矩由负载惯性和加速度组成,如下所示。这是用于计算所有类型电机的加速扭矩的最常用方程式。
步进电机和伺服电机可以使用不同的公式,因为它们处理的是脉冲速度 (Hz)。有两个方程可用于两种类型的运动曲线:有或没有加速/减速。

速度/每分钟转数
对于线性系统,所有线性单位(例如所需速度)都需要转换回电机方面的 RPM 或 Hz。 这样做的目的是确定(从电机的速度扭矩曲线)在该速度下是否有足够的扭矩。 这些速度转换是非常基础的,如果您只是使用逻辑,就可以算出公式。
旋转设备上的 RPM 非常简单。但是,要从线性单位转换为旋转单位,您必须使用正确的系数进行转换。例如,对于皮带和滑轮,使用滑轮周长。对于滚珠丝杠,使用丝杠的导程/螺距。对于链轮和链条,使用链轮的节圆直径或齿数。对于齿条和小齿轮,使用齿条的节距。
根据偏好计算所需速度的方法主要有两种。
下面是一些使用“RPM”的公式,其中PB是螺杆的螺距,VL是线速度,J0是转子惯量,JL是负载惯量,t1是加速时间。
所需转速 ( Nm ):

所需加速扭矩 ( Ta ):
以下是一些使用“Hz”的公式。 Oriental Motor 工程师通常使用如下所示的脉冲 (Hz) 公式。
操作脉冲数A
运行脉冲数表示为使负载从A点到B点电机必须旋转的角度加起来的脉冲信号数。

工作脉冲速度f2 (Hz)
运转脉冲速度可由运转脉冲数、定位时间、加(减速)时间求得。
1) 加减速运行时
加速(减速)时间的高低是重要的一点。加(减速)时间与加速力矩、加减速率相关,不易设定。
首先,以定位时间的 25% 左右计算加(减速)时间作为参考。(计算必须在最终选择前进行调整。)
2) 对于启动/停止操作
提示:为什么要使用加速/减速?
这是因为即使以目标速度立即启动似乎更容易,但它会导致很大的加速扭矩,因此需要更大的电机。更大的电机也意味着更高的成本和更大的占地面积,这对于机器设计来说并不是最理想的。
这是一个您可以遵循的计算示例。我无法提及这些例子对我有多大帮助。
示例:负载转矩和负载惯量的计算
在下面的示例中,让我们尝试使用我们目前学到的知识来计算负载扭矩、负载惯性和加速扭矩。就我个人而言,我首先计算负载惯量,然后是负载扭矩,然后是速度,然后是加速扭矩。以下信息描述了电动机构和给定参数。

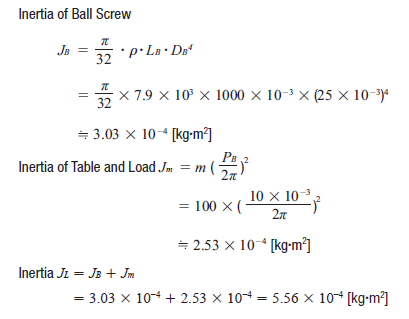
第 1 步:加载惯量
计算螺杆的负载惯量,然后分别计算工作台和负载,然后将它们相加。负载惯量可用于暂定电机选择,稍后我将对此进行解释。
第 2 步:加载扭矩
使用螺钉的负载扭矩方程式并填写变量的所有空白。确保针对特定应用使用正确的方程式。

第 3 步: 速度 (RPM)
所需速度可通过以下等式计算。使用螺杆PB的螺距/导程将线速度转换为 RPM。在这种情况下,我们使用 RPM 公式而不是 Hz。

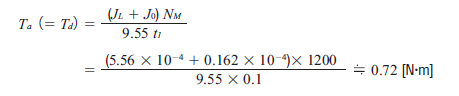
第 4 步:加速扭矩
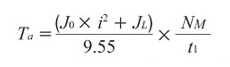
这是所有电机的加速扭矩的通用公式。
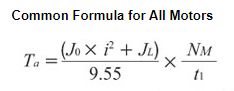
我们只需要填写变量的空白。要计算加速扭矩 Ta,请根据负载惯量(如前所述)暂时选择一个电机,然后将该电机的 转子惯量值J0代入加速扭矩方程。如果没有来自电机的转子惯量,我们无法计算负载惯量。
TIP : 如何根据负载惯量初步选择电机
对于交流恒速电机、交流调速电机和无刷调速电机,您需要查看允许的负载惯量值。对于步进电机或伺服电机,您需要知道每种电机可以处理的 允许惯量比。
对于步进电机,一般准则是将惯量比(负载惯量或反射负载惯量除以转子惯量)保持在 10:1 以下,对于比 NEMA 17 更快的运动曲线或更小的框架尺寸,保持 5:1 以下。
对于闭环步进电机,建议使用高达 30:1 的惯量比。
对于自动调整的伺服电机,惯量比增加到 50:1。对于手动调整的伺服电机,它可以增加到 100:1。
根据负载惯量初步选型电机后,找到规格中的电机转子惯量,代入J0的值,即可完成加速力矩的计算。
只是为了踢球,这里是另一个使用赫兹单位的加速扭矩方程。“我”是齿轮比。

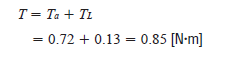
第 5 步:所需的总扭矩和安全系数
将负载扭矩和加速扭矩相加以获得总所需扭矩。我们将需要一个至少可以输出 0.85 Nm 扭矩的步进电机。
然而,这是没有安全系数的。如果使用安全系数 2,那么我们将需要一个能够在大约 1200 RPM 时输出 1.7 Nm 扭矩的步进电机;取决于加速/减速率。安全系数是根据变量的准确性确定的。
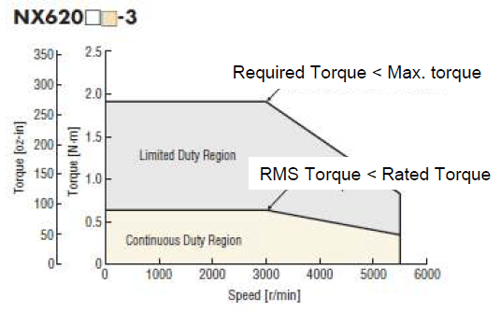
提示:不要使用最大保持扭矩来确定步进电机的尺寸
对于步进电机,重要的是不要使用“最大保持扭矩”规格来选择电机,因为它是在零速和全电流下测量的。
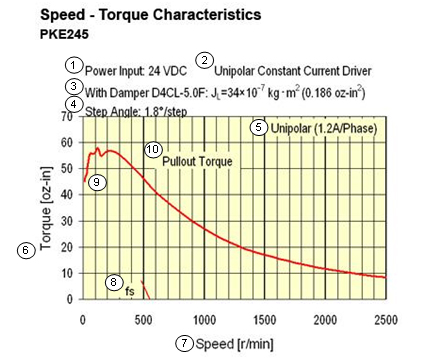
由于步进电机产生的扭矩随着速度的增加而减小,因此您需要查看速度-扭矩曲线以确定步进电机是否会在该速度下工作。通常,根据所需的总扭矩和所需的最大速度选择电机是一个安全的选择,即使电机在其最大速度下可能不需要该扭矩。如果处理得当,稍微加大尺寸可以延长电机的使用寿命或提高电机的性能。

第 6 步:RMS 扭矩(伺服电机)
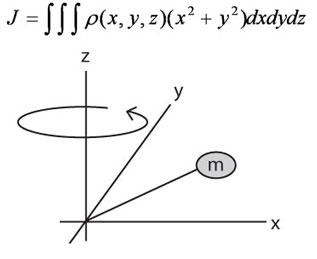
对于伺服电机,还有一个计算是必须要做的,就是RMS扭矩。均方根扭矩或 RMS 扭矩是指扭矩的平均值,它考虑了运行期间使用的所有变化的扭矩值以及每个扭矩值需要的持续时间。RMS 扭矩用于确定电机尺寸是否合适以避免热过载。
对于伺服电机,所需扭矩必须低于电机的峰值扭矩,有效扭矩必须低于电机的额定扭矩。由于峰值扭矩需要高水平的电机电流,因此如果不使电机过热则无法持续。
现在让我们看一下 RMS 扭矩的方程式,并可视化运动曲线模式中的变量。
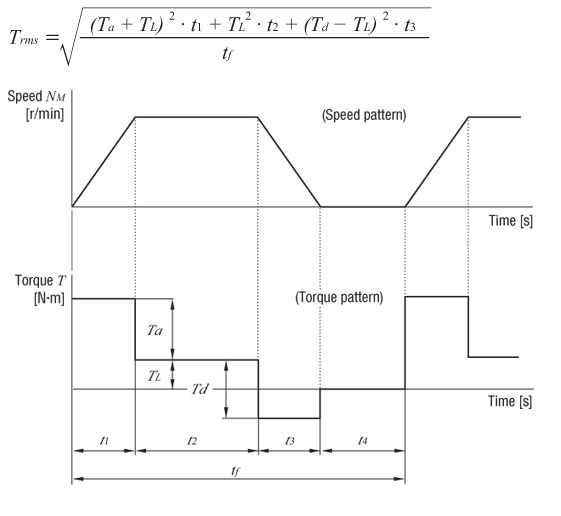
对于这个例子,这里是计算。

此处,t1 + t2 +t3 = 2.1 [s] 来自操作周期,t1 = t3 = 0.1 用于加速和减速时间。因此,t2 = 2.1-0.1 - 0.1 = 1.9 [s]。
Trms 与伺服电机的额定转矩 TM 之比(有效负载安全系数)由下式表示。
通常,电动机可以在1.5~2或更高的有效负载安全系数下运行。
提示:有关 RMS 扭矩的更多信息
有关 RMS 扭矩的更多信息,请参阅 Linear Motion Tips (Design World) 中的一篇好文章。< >为什么 RMS 扭矩对于电机选型很重要
结果
对于此应用,我们需要具有高定位(停止)精度的电机,可以是步进电机或伺服电机。
对于步进电机,我们需要满足或超过以下要求。
负载惯量 = 5.56 × 10−4 [kg·m2]
总扭矩 = 0.85 [N·m]*
最大速度 = 1200[r/min]
对于伺服电机,我们需要满足或超过以下要求。
负载惯量 = 5.56 × 10−4 [kg·m2]
总扭矩 = 0.85 [N·m]*
均方根扭矩 = 0.24[N·m]
最大速度 = 1200[r/min]
*计算的扭矩不包括安全系数。
有了扭矩、负载惯量和速度值,我们现在就有了足够的信息来选择电机。然而,为了维持长期寿命,还有另一个重要的标准需要考虑。提示:它与轴承有关。请订阅以接收新帖子。
审核编辑:汤梓红
-
负载
+关注
关注
2文章
564浏览量
34326 -
电机
+关注
关注
142文章
9001浏览量
145337 -
扭矩
+关注
关注
1文章
64浏览量
12654
发布评论请先 登录
相关推荐
怎样去计算步进电机扭矩的大小

伺服电机扭矩计算公式
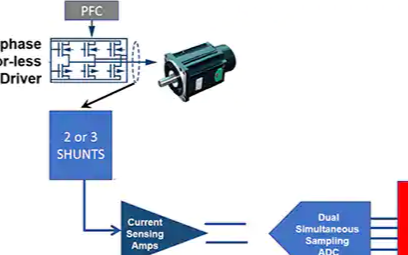
在工业BLDC系统中,如何精准测量电机的扭矩和速度






 工商网监
工商网监
评论