 如何列写控制系统微分方程
如何列写控制系统微分方程

如何列写控制系统微分方程:
列写控制系统微分方程注意事项:1,由系统原理图画出系统方块图,并列写系统各元件的微分方程。2,信号传递单向性,前一个元件输出是后一个元件的输入;3,后级元件不对前级元件产生负载效应。4,消去中间变量得到描述系统输出量与输入量之间关系的微分方程;
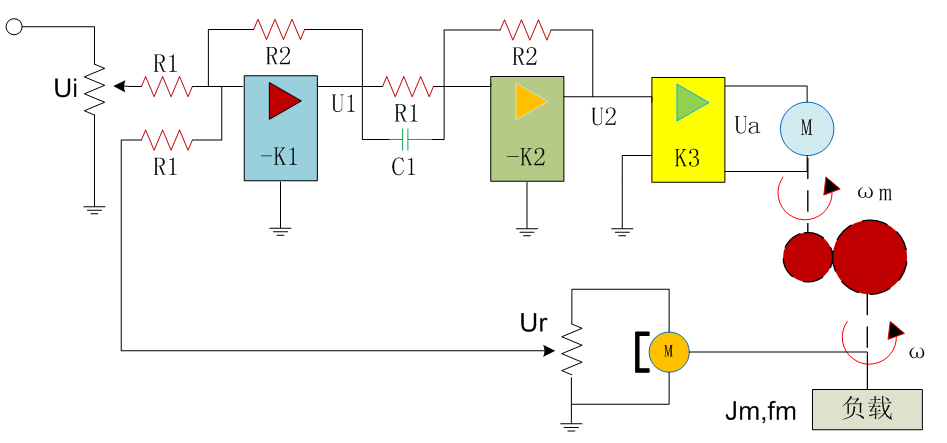
控制系统被控对象是电动机通过齿轮带动负载,系统输出量是转速ω,参据量是Ui,控制系统由给定电位器、运算放大器1、运算放大器2、功率放大器3、齿轮减速器、测速发电机等部分组成。首先分别列写各元器件微分方程:
运算放大器1:参据量Ui与速度反馈电压Ut经过放大后产生偏差放大信号输出。

运算放大器2:带有RC网络的放大电路,U2与U1之间的微分方程为:

式中,K2=R2/R1是运算放大器2的比例系数,τ=R1C是微分时间常数。因此,这是一个比例微分控制元件;
运算放大器3:功率放大器,输入输出方程为:

直流电动机:
首先把已知的齿轮系等效转动惯量、粘性摩擦系数和等效负载转矩带入齿轮系动态微分方程:

列写输出转矩等效微分方程:

然后结合直流电机电压方程、电磁转矩方程列写直流电机微分方程为:

齿轮系:设齿轮系的输入与输出角速度比为i,则电动机转速ωm经齿轮系减速后变为ω:

测速发电机:测速发电机输出电压Ut与其转速ω成正比:

消去方程中间变量Ut、U1、U2、Ua,ωm,整理后获得控制系统微分方程:

该式用于研究给定电压Ui和扰动转矩Mc作用于系统时,速度控制系统的动态性能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制系统
+关注
关注
41文章
6993浏览量
114468 -
功率放大器
+关注
关注
104文章
4394浏览量
140678 -
运算放大器
+关注
关注
218文章
6479浏览量
182023 -
信号
+关注
关注
12文章
2939浏览量
80436 -
微分方程
+关注
关注
0文章
21浏览量
9792
发布评论请先 登录
相关推荐
热点推荐
Matlab偏微分方程工具箱应用说明
poimesh 在矩形区域上产生规则的网络refinemesh 细化三角形网络wbound 写一个边界描述文件wgeom 写一个几何描述文件pdecont 画轮廓图pdemesh 画偏微分方程的三角形
发表于 09-22 15:26
Matlab求解微分方程(ODEs/PDEs)
本帖最后由 A670521546 于 2011-7-8 10:29 编辑
常微分方程(ODEs)的MATLAB数值解法》偏微分方程(PDEs)的MATLAB数值解法》Z变换和差分方程
发表于 07-08 08:42
使用传递函数代替常系数微分方程
的分母为系统的特征多项式;极点:特征多项式等于0组成特征方程的根;阶数:特征多项式的最高阶数n;根轨迹增益:;拉普拉斯变换:可采用传递函数代替常系数微分方程来描述系统的特性。这就为采用
发表于 05-21 08:43
用微分方程来描述自动控制系统各变量的动态关系
要进一步研究一个自动控制系统, 就需要建立系统的数学模型来描述一个系统。 所谓数学模型, 就是描述系统输入、 输出变量以及内部各变量之间关系的数学表达式。 常用
发表于 09-15 07:20
常微分方程的MAtLAB解法
摘要:对一些不能求解解析解的常微分方程和偏微分方程进行精确求解是非常困难的,探讨了用MATLAB方法对此类方程进行求解,结合实例介绍了MATLAB数值计算的方法,先将物体的运
发表于 01-08 21:24
•61次下载
含一般时延的高阶泛函微分方程的周期解
研究了一类含有“一般”时延的高阶泛函微分方程的周期解问题,将原方程化为等价的泛函微分方程,并利用该等价泛函微分方程的特征方程,得到了原
发表于 02-28 17:07
•15次下载

一类高阶非线性微分方程的解法
对于高阶线性微分方程,各教材均有系统的求解方法 .而对于一般高阶非线性微分程,由于没有系统的解法,故有关微分方程的专门教材也未给与更多的介绍
发表于 03-03 22:12
•24次下载
Matlab的微分、积分和微分方程
微分、积分和微分方程4.1. 知识要点和背景:微积分学基本定理 4.2 实验与观察(Ⅰ):数值微积分4.2.1实验:积分定义、微分
发表于 10-17 00:32
•4935次阅读




评论