 事件相机的原理与应用简介
事件相机的原理与应用简介
本文转自空中机器人前沿,作者西湖大学-郑业。
一.概述
事件相机(Event-based camera)是一种受生物启发的新型视觉传感器,有时也称动态视觉传感器(DVS,dynamic visionsensor)或DAVIS(Dynamic and Active-Pixel VisionSensor)。相比于以固定帧率采集图像的标准相机,它具有低延迟、高动态范围、低功耗、高时间分辨率等特点。
图1展示了事件相机和标准相机的数据采集过程,从中可看出,当物体运动时,标准相机受到采样频率的影响会丢失部分数据,而事件相机采集的数据则相对更加完整。另外,当目标物体与相机具有相对运动时,受到曝光时间等因素的影响,用标准相机获得的图像极易产生运动模糊,而用事件相机获得的数据则没有这个问题。
下面,我将从工作原理、常见的应用场景和数据处理范式出发,对事件相机做一个简要介绍。
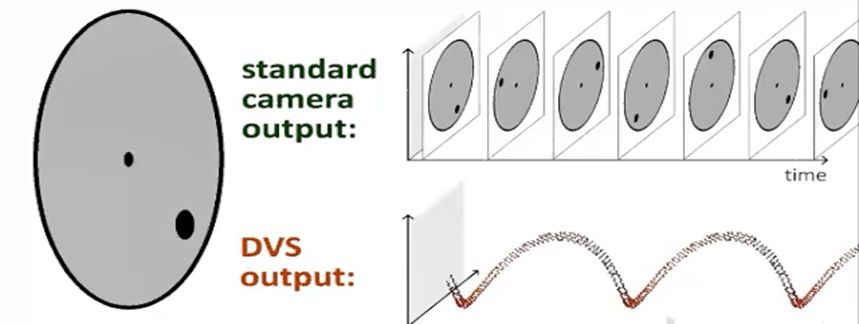
图1. 事件相机与标准相机输出数据对比[1]
二.事件相机的工作原理
事件相机可以简单理解为一种“仅感知运动物体”的传感器。在事件相机的每个像素处都有一个独立的光电传感模块,当该像素处的亮度变化超过设定阈值时,就会生成、输出事件数据(有时也称脉冲数据)。另外,由于所有的像素都是独立工作的,所以事件相机的数据输出是异步的,在空间上呈现稀疏的特点。这也是事件相机与标准相机的最大不同之处,也是事件相机的核心创新。这种成像范式的好处是可以大大减少冗余数据,从而提高后处理算法的计算效率。
传感器的工作原理通常基于一个特定的数学模型,下面我们介绍一下事件相机的数学模型。为了方便介绍,我们首先定义一些名词和变量。设定亮度为;事件相机中的亮度定义为实际亮度的对数值,即。那么,时刻在像素处的亮度增益记为
其中,表示微小时间间隔。当亮度变化超过设定的阈值时,那么就会触发事件,该过程表示为
其中,表示设定亮度变化阈值,通常情况下,的值设置为亮度的10%~50%;表示事件的极性,若亮度增强,则表示发生正事件,否则,表示发生负事件。最终,触发的事件数据表示为。
图2展示了事件触发的效果。其中,左图表示时间内在各像素处生成的离散数据点,蓝色的点表示正事件,红色的点表示负事件;右图是将时间内的全部事件,按像素位置堆叠在一起,放到一张图像上的效果。从右图中可以看出,事件都发生在物体的边缘。这主要是因为,当物体运动时(或相机运动时),物体的边缘与背景有更大的亮度变化。
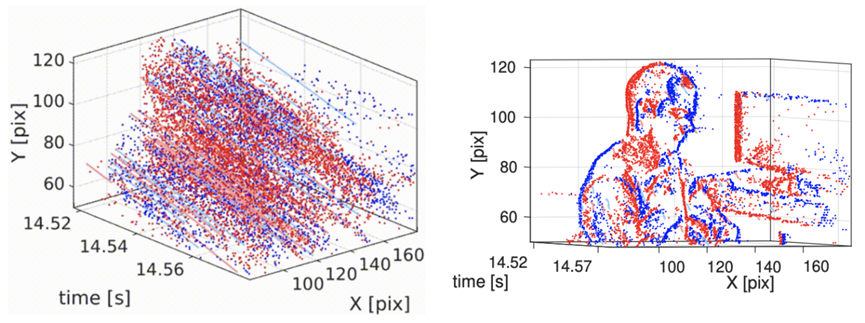
图2. 事件相机工作原理[2]
三.常见应用场景及处理范式
事件相机可以完成一些基于帧的标准相机无法完成的任务,比如高速运动估计,高动态范围建图等等。除此之外,它还被研究用于一些传统的视觉任务,如特征检测与跟踪、光流估计、3D重建和姿态估计等。
为了充分开发事件相机的性能,研究人员也开始思考能从事件数据中提取更多有效信息的方法。目前,常见的事件数据表征方法包括独立事件、事件包、事件帧、体素栅格、3D点集等。这些事件表征方法可以被应用在事件处理系统中的各个部分,包含前处理,核心处理和后处理。
事件数据的主流处理方法可以分为两类,分别是event-by-event的方法和group of events的方法[3]。前者可以理解为逐个事件的处理方法。这类方法常见于各种用于降低事件噪声、提取特征和图像重建的滤波器中。它们通过对比当前事件与过去事件完成系统状态的更新。
另外,现在也有许多数据驱动的方法在使用逐个事件处理的方法,包括采用监督学习和无监督学习方法来训练分类器。基于group of events的处理方法可以理解为累积时间内的数据进行处理。由于单个事件携带的信息十分有限,这种累积事件群的处理方法极大地降低了噪声的干扰,提升了算法的可靠性。这种处理方法主要使用的数据表征方法包括事件帧,体栅格和3D点集。在基于模型的方法中,往往将事件数据累积为事件帧,然后利用基于图像的处理方法来解决问题。另外还有一种基于数据驱动的方法,它们直接将整个事件包输入神经网络,目前该类方法已经广泛应用于分类、光流估计、深度估计等任务中,并且取得了不错的效果。
四. 小结
本文简要地介绍了事件相机的工作原理与常见应用,同时也对事件数据的表征方式和处理方法做了说明。
最后,请欣赏事件相机镜头下的杭城飘雪,感受一下不一样的景色。
审核编辑:汤梓红
-
传感器
+关注
关注
2548文章
50642浏览量
751734 -
数据
+关注
关注
8文章
6867浏览量
88800 -
工作原理
+关注
关注
4文章
274浏览量
37655 -
相机
+关注
关注
4文章
1343浏览量
53492 -
视觉传感器
+关注
关注
3文章
247浏览量
22855
原文标题:事件相机的原理与应用简介
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

智能相机技术优势及各部分功能简介
SDIO简介
OpenHarmony3.1分布式技术资料合集
vr相机和普通相机有什么区别?VR相机怎么用?
相机设备和相机采集功能的实现
智能相机之图像防抖技术简介
CMUcam5 Pixy视觉相机传感器简介第二部分—创建球平衡梁





 工商网监
工商网监
评论