 运动编程示例:重复运动的循环功能
运动编程示例:重复运动的循环功能
无论产品提供多少功能,如果没有直观易用的软件,这些功能都很难实现。
Oriental Motor 通过提供与多个系列产品兼容的通用 MEXE02 支持软件,为客户提供便利。由于每个产品提供不同的功能,因此软件格式会发生变化以匹配产品。不同产品具有相同的软件用户界面可以缩短每个轴的运动序列编程所需的时间。
任何AZ系列产品配合MEXE02软件使用时,循环功能可用。
有关该软件的介绍,请阅读此博客文章或单击下图。
< >
循环函数
步进电机最常见的运动序列之一是每次都在精确的距离和方向上重复运动。这在编程术语中通常称为循环子例程,这意味着循环子例程中包含的任何指令集都将无限期地重复,或者直到满足条件为止。一旦该循环完成,它就会返回到主程序。
以下摘自 AZ 系列功能手册。
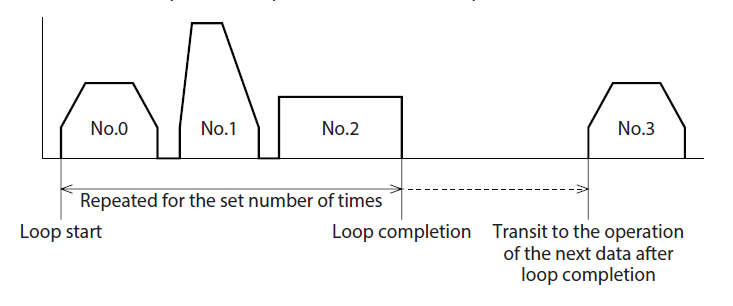
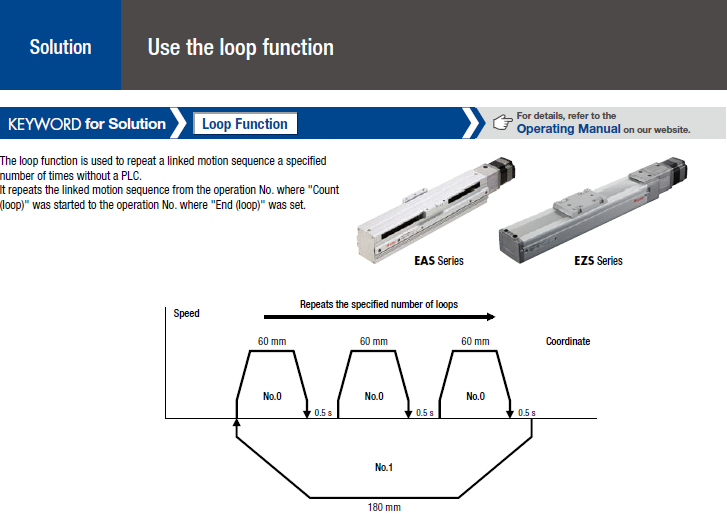
循环功能是将联动运转数据编号的运转重复设定次数的功能。
从设置了“Loop count”的运行数据编号到设置了“Loop end number”的运行数据编号,重复运行“Loop count”中设置的次数。设定次数的动作结束后,转移到「下一个数据编号」中设定的动作数据编号。
基本上,循环函数按照您设置的次数重复相同的动作。这对于每次都需要相同固定距离的应用非常有用,例如送纸/票据或旋转分度台。
应用实例:
对于自动收报机,每次的动作都是相同的,所以让我们使用另一个需要重复多个动作的例子;就像机器人在有人走过时用手臂和头跳舞一样。在此应用程序中,您可以将 AZ 电机用于手臂旋转关节,将 3 个不同的动作依次链接在一起(0 号、1 号、2 号),将它们循环 x 次,然后一旦循环完成,它将移动到下一个数据集(No.3),然后运动序列结束。记得在最后保持那个姿势。
这就是我们想要做的...
执行 0 号动作
执行一号动作
执行 2 号动作
循环0号、1号、2号动作3次
执行 3 号动作
这就是我们编程的方式......
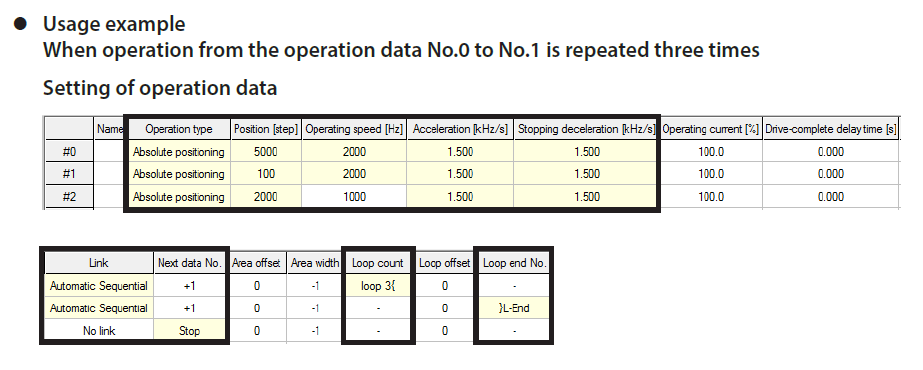
看看下面的使用示例,看看这个运动序列是如何在 MEXE02 软件上实际编程的。请注意,此运动序列只需要 3 个数据集(#0、#1、#2)。MEXE02 软件的一个好处是一旦移动被编程和存储,就不需要再次编程。秘密在第二张图片中,它显示了“Next data No.”、“Loop count”和“Loop end No.”。这告诉软件如何执行数据集 #0、#1 和 #2。
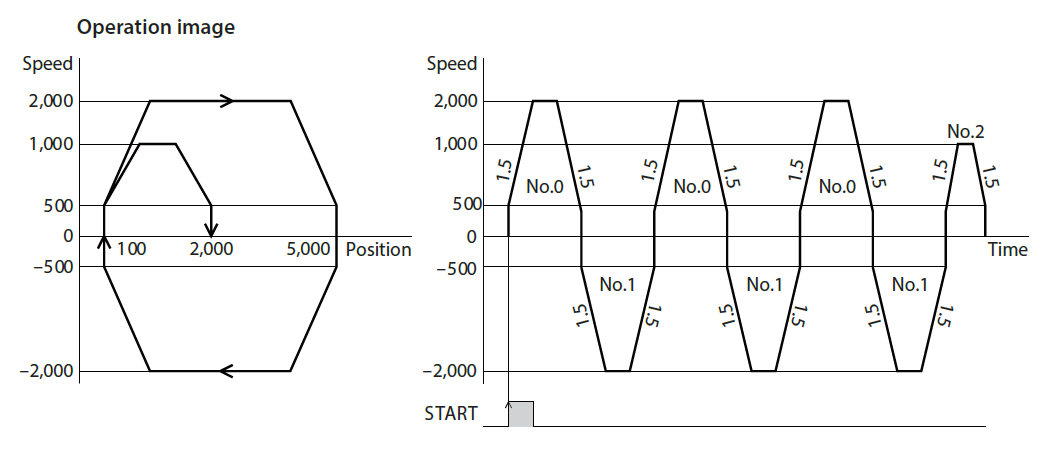
然后……大功告成(记得保存)。这是我们绘制图表时的运动样子。
更多驾驶员智能的案例
传统的步进电机驱动器除了证明功率和逻辑之外,并不是很智能。基本上,它们只是将接收到的任何脉冲命令转换为电机上的运动。智能实际上是在上位控制器上,就像PLC一样,可以使用梯形逻辑和脉冲输出来执行复杂的运动。
使用 AZ 系列驱动器的优势在于其先进的运动顺序编程,这使得 AZ 系列驱动器在某些情况下无需 PLC 即可运行。提供多种类型的驱动器用于多种用途,例如脉冲输入、存储数据和多轴。多达 256 个“动作”可以被编程并存储在驱动器的非易失性存储器中。通过使用现场总线通信,例如 Modbus RTU、EtherNet/IP 或 EtherCAT,可以实现更多“动作”。
存储数据编程的优点
节省空间
设计被简化
减轻主机控制器的负担
通过取消 PLC,可以节省更多空间并简化设计。至少,AZ 系列驱动器应该减轻上位控制器的负担,这意味着可以使用更便宜的 PLC 或 HMI。由于AZ系列电机内置机械式绝对编码器,因此也取消了外部编码器、电池和传感器。
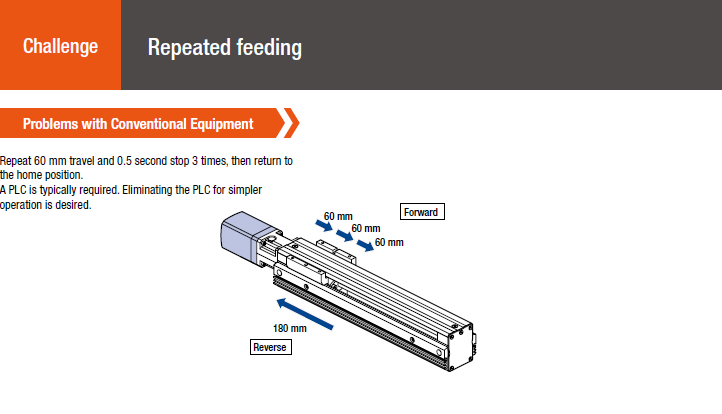
这是另一个带有线性滑块的应用示例。
审核编辑黄宇
-
驱动器
+关注
关注
52文章
8242浏览量
146419 -
步进电机
+关注
关注
150文章
3112浏览量
147522 -
编程
+关注
关注
88文章
3616浏览量
93760
发布评论请先 登录
相关推荐
LabVIEW运动控制&视觉运动
运动控制编程福音
运动控制编程难不难?非常简单!
运动控制器、运动控制卡、PLC、CNC的关系
运动控制器的单轴持续运动设置
ZMC运动控制器多任务编程一
基于MELSEC iQ-F FX5运动模块的功能及编程

入冬别忘运动,运动别忘带上TA
运动控制器实现高级功能的编程手册免费下载
PLC小车往返运动编程案例分享
研控运动控制卡的编程小技巧
如何通过Qt编程实现直线插补的运动控制





 工商网监
工商网监
评论