 制造机器人有多容易
制造机器人有多容易

由于全球在降低长期成本、保持质量和腾出时间让人类完成“人类”任务方面的努力,机器人在许多行业的采用率正在增加。例如,通过使用机器人清洁地板或在超市补货,人类员工可以花更多时间帮助客户或向客户销售产品。公司可以通过购买现成的机器人或以更低的成本制造自己的机器人来利用这种机器人趋势。
如果工程资源有限,选择合适的组件可以降低构建机器人的难度和时间。
在这篇文章中,我将简要介绍我们构建 7 轴机械臂所采取的步骤、我们在此过程中学到的一些东西,以及用更少的组件完成它的方法。
1. 头脑风暴——你需要什么来完成手头的任务?
头脑风暴是机器制造过程的概念阶段,机器人设计师决定他们要制造什么类型的机器人,它需要执行什么任务,以及它需要做得多好。第一步可以像草图一样简单,但也需要制定细节。对于机械臂,我们需要确定运动轴的数量以及满足要求的组件类型。这些选择包括 PNP 或 NPN 输出传感器、增量或绝对编码器、平行(直列)齿轮箱或直角齿轮箱、谐波或行星齿轮,或者伺服电机与步进电机。
设计人员需要评估每种组件的优缺点,并选择最适合预期应用的组件。例如,伺服电机和步进电机可以执行相同的任务,但速度、噪音和热量可能是决定因素。然而,多年来已经解决了这些问题,对于不需要极高速度的应用,应将其视为伺服电机的替代品。研究类似的机器人是如何设计的,以及哪些部件可以在内部制造可能会有所帮助。不要忘记关注机器的总体成本,包括工时,以取悦您的老板。< >闭环步进电机技术
2. 设计——确保一切都适合并确定电机的尺寸。
这个阶段是时候考虑机器人中所有必要组件的布局,并检查所有规格和尺寸图以确保所有组件兼容并适合设计。3D CAD 绘图是可视化设计的好方法。选择能够提供大部分组件(和 CAD 图纸)的制造商有助于最大程度地减少工作量。很多注意力通常都放在较大的组件上,例如电机、驱动器和 PLC,但较小的组件,例如电缆或开关,也需要空间。请记住,较重的部件需要更大的电机才能移动,因此请考虑为金属部件(例如臂段)选择材料。
在这一点上确定所选电机是否能够完成工作也很重要。许多制造商都提供电机选型软件,以帮助找到最适合应用的电机。Oriental Motor 非常重视电机选型。我们的工程师很乐意分析您的选型结果,这样您就可以充分利用我们的产品。
< >电机尺寸
3. 物料清单 - 确保您拥有所需的一切。
一旦确认了所有必要的组件,就该制作物料清单了。清楚地记录零件编号、数量、价格和交货时间,以避免订单错误造成的延误,并保存信息以避免重复工作。
购买前核实所有零件号、规格、尺寸和交货时间,因为缺少一个字母或数字可能意味着不同的产品。再一次,尽量不要忘记制造商提供的安装支架和预制电缆等小东西。这些将节省您的时间。此外,请考虑购买更多数量以避免因意外产品损坏而造成的延误。
|
提示 注意有助于消除额外组件的内置功能。例如,Oriental Motor的AZ系列闭环步进电机内置多旋转机械式绝对编码器,即使断电也能保持位置数据。因此,它可以消除对存在传感器、电缆和电池的需求。 < >了解更多 |
一旦提交了物料清单的采购订单,我们就用时间准备电缆组件或制造支架。根据我多年的故障排除经验,虽然看起来很容易,但制造电缆比您想象的更具挑战性。制作不良的电机电缆通常是问题的根源,并且可能会使驱动器中的电路短路,因此请花时间在第一时间做对。
4. 构建 - 从下往上一次构建一个轴,或将它们分开。
一旦收到 BOM 中的组件和材料,就可以开始组装/构建过程。从底轴开始并逐步向上会更容易。一个明显的原因是,对于多轴机械臂,底轴通常是最重的,因为它必须承载所有其他轴并处理力矩负载。 一旦将底部旋转执行器安装在刚性底座上,您就可以模块化地一个接一个地安装每个轴,并在安装过程中进行测试。一些设计师可能更喜欢在进行最终组装之前先组装和测试每个轴。
5. 接线 - 确保电缆已牢固拧紧且不会受到伤害。
对于机械臂,电缆的组织可以避免潜在的电缆扭曲问题、断开连接甚至连接器破损。管理不善的电缆系统也会减少机械臂的运动范围。良好的电缆管理实践可以像使用电缆扎带一样简单。另一个例子是 XYZ 平台上使用的线性致动器的电缆轨道。一些制造商提供标准型和柔性型电缆。柔性型电缆设计用于反复弯曲并提供更小的弯曲半径。它们非常适合电缆随运动移动的应用。
6. 编程——比你想象的要花更长的时间。
许多制造商使用他们自己的软件来为他们的电机编程。如果您还不知道如何对软件进行编程,那么学习曲线可能会很长。建议留出比预期更多的编程时间。使用通用软件或同一制造商的产品有助于缩短学习曲线。可以有多种方法来对相同类型的运动进行编程。类似于设计,越简单越好。幸运的是,我们能够使用一个软件对所有驱动程序进行编程。由于运动数据存储在驱动程序中,我们能够简化 PLC/HMI 编程。
7. 测试、测试、再测试——想想所有可能的场景。
这是真正有趣的部分。现在一切都已构建、组装、接线和编程,我们需要投入大量时间进行测试,以模拟可能给机器人带来问题的潜在场景。这时我们必须设身处地为客户着想,并考虑可能发生问题的每一种可能情况。例如,如果操作员同时按下这 2 个按钮,会发生什么情况?(这是人性。我们都知道我们喜欢按按钮。)
这是我们的 7 轴机械臂(取放机器人)的外观。观看下面的视频,了解它在编程时是如何工作的。我们还在开发带有新“迷你”驱动程序的新版机器人。以后请光临我们的贸易展摊位,看看它的实际效果!
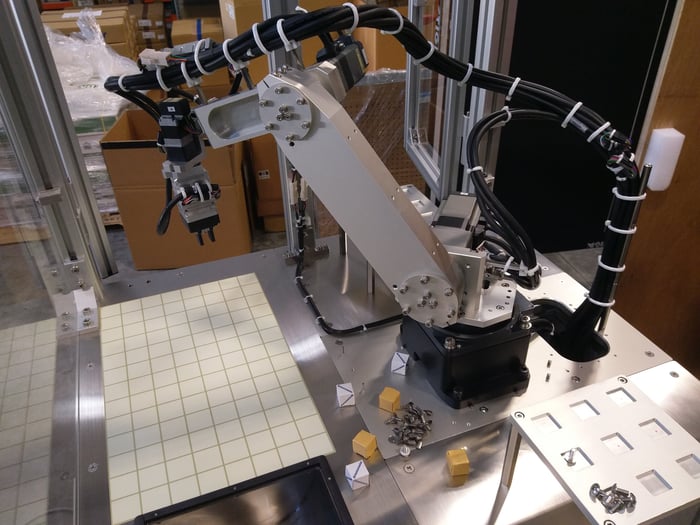
为了节省时间,我们为所有运动轴使用了同一系列的产品。Oriental Motor 已经包含获得专利的内置多旋转机械绝对位置传感器,因此我们能够非常快速地进行演示,而无需花费时间选择、安装、接线和测试任何传感器或编码器。< >AZ系列
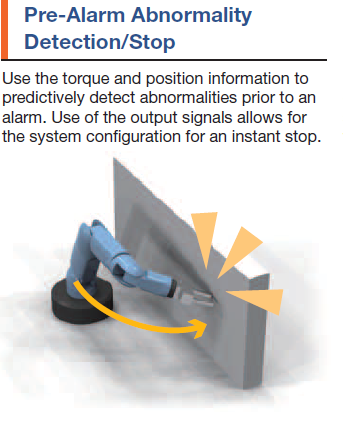
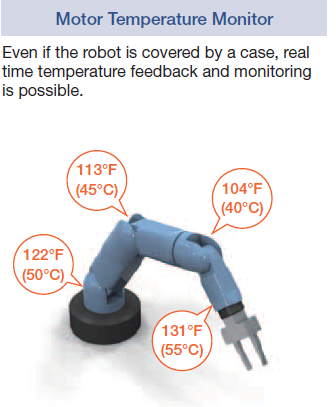
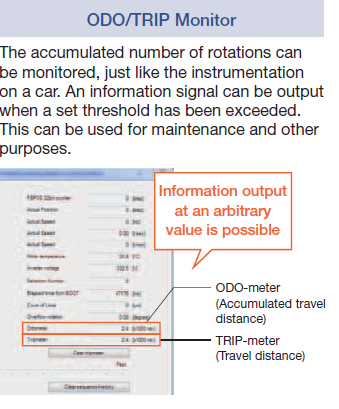
此外,AZ 系列闭环步进电机系统提供先进的内置功能,可简化机器人的构建。
 |
 |
 |
我们为承载整个手臂的底部轴(黑色部分)选择了高负载空心旋转执行器。它的交叉滚子轴承擅长处理高负载,中空部分可用于将电缆穿过底柜。从轴 2 到轴 6,我们使用谐波减速机来处理增加的负载惯量并消除齿隙。在手臂的末端,我们连接了一个夹具组件,这样它就可以拿起小盒子来演示拾取和放置功能。
这是电机组件的列表。AZ 系列有许多齿轮选项,这确实很有帮助,我们的线性和旋转执行器也有相同的选项。确实有很多选择可以满足不同的要求。< >绝对位置控制技术< >Alphastep Hybrid Control 技术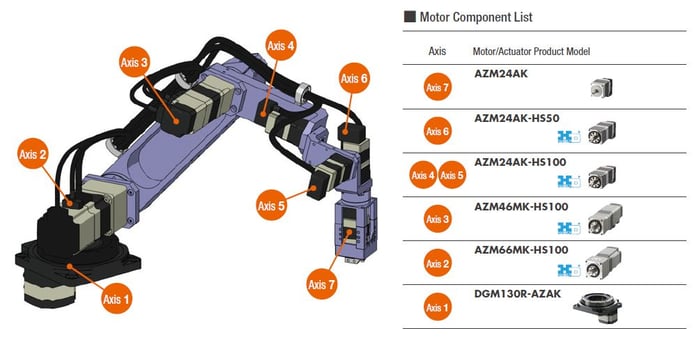
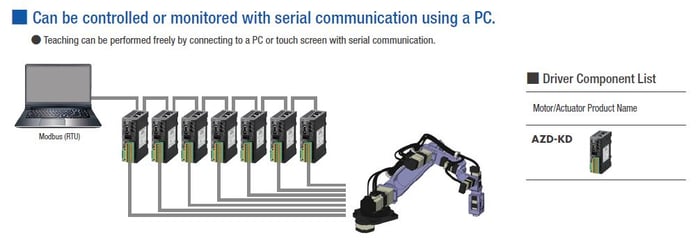
每个 AZ 系列电机都可以连接到提供不同功能以满足不同需求的设备,例如能够接受脉冲序列(或存储运动数据)、能够为多个轴提供动力或能够与主机(HMI)通信、PLC 或 IPC)通过工业现场总线协议,如以太网/IP、EtherCAT 或 Modbus RTU。网络网关也可用于其他协议。< >各种司机
驱动组件列表如下所示。请注意,只有一个部件号。一旦用专用电缆连接电机或执行器,驱动器就会自动识别电机的规格并设置参数,例如电流、分辨率和内部齿轮比。
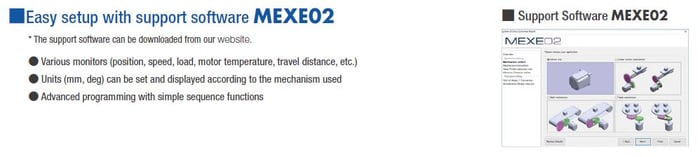
对轴进行编程非常简单。与传统的逐行编程不同,它提供了一个友好的 GUI 界面,只需要对运动配置文件进行编程(最多 256 个)。高级运动链接功能允许循环操作和条件语句,远程状态监控功能使预测性维护成为可能。 < >MEXE02支持软件
恭喜你到了帖子的结尾。欣赏视频!
更新:这是与我们最新的AlphaStep AZ 系列迷你驱动程序相同的演示!
< >
观看更多。< >产品应用视频
< >
< >了解有关 AlphaStep AZ 系列的更多信息
要了解有关#AlphaStep 的更多信息,请为您的团队申请技术研讨会或产品演示。
< >
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
从市场角度对机器人的基本解读

医疗机器人有哪些_医疗机器人有哪些应用
AMD赞助多支FIRST机器人竞赛团队
Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
巡检机器人有哪些功能和作用?

开年首秀 多可机器人携“机器人+”无限应用强势登陆
「喜报」迈步机器人荣获机器人应用典型案例奖

机器人基于开源的多模态语言视觉大模型

自动打电话的机器人有哪些功能?






 工商网监
工商网监
评论