 SHEPWM的基本原理和Simulink仿真
SHEPWM的基本原理和Simulink仿真
特定消谐技术是通过计算PWM波的开关时刻,消除特定的低阶谐波。 其基本理论是恰当地控制逆变器脉宽调制电压的波形,通过脉宽平均法把逆变器输出的方波电压转换成等效的正弦波,以消除某些特定的谐波。 本文对特定谐波消除方法的基本原理进行介绍。
01SHEPWM的基本原理
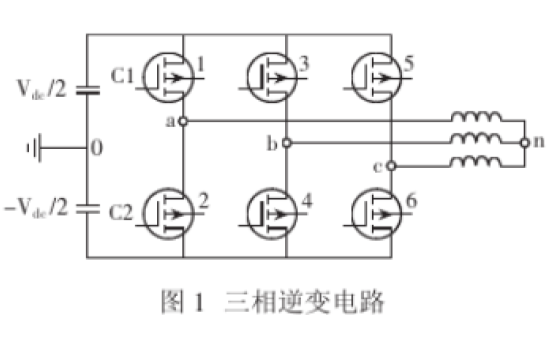
以单相 SHEPWM 输出的双极性电压波形为例, 对逆变器输出电压波形进行傅里叶分析。 三相 SHEPWM 输出波形中的 B 相和 C 相波形,只需将单相波形移相 120°和 240°即可得到。 逆变器双极性输出电压波形如图 1所示。
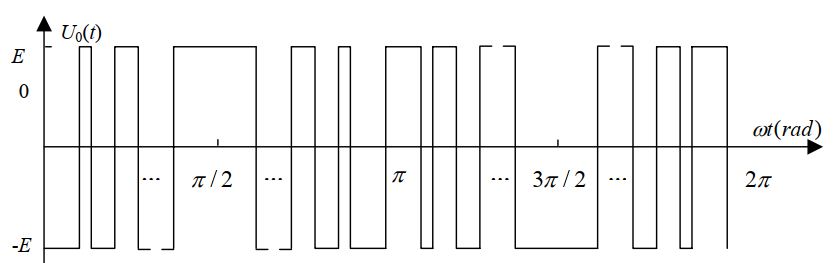
图 1 双极性 SHEPWM 输出电压波形
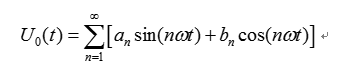
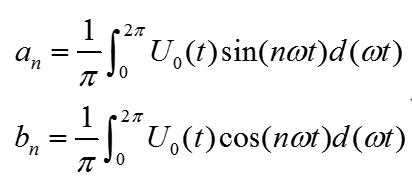
其中:
由于图 1中输出电压波形 U(t)为奇函数,又是奇谐函数,即 U0(t)在[0, π]区间以 π/2 为轴对称,在[0, 2π]区间以 π 点对点对称,因此有:
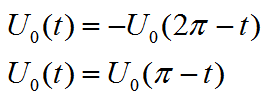
因此傅利叶分解式中的直流分量、余弦分量和偶次正弦分量系数为零,其傅里叶分解系数可简化为:
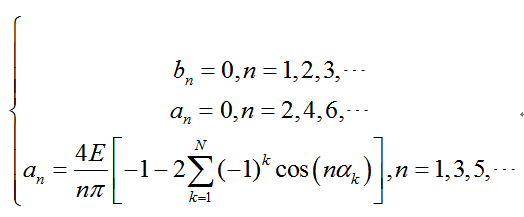
如果令 q( q=a1/vdc,量纲一)为选定的基波幅值,令其他 N -1 个低阶的高次谐波的幅值为零,则有:
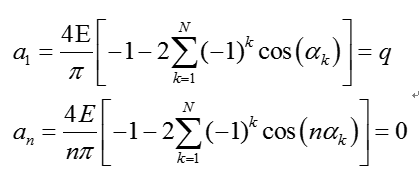
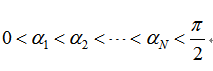
上方程组即为逆变器双极性输出单相特定消谐数学模型,N 表示在[0,π/2]区间内开关角的数量, αk 为区间内 N 个开关角中的第 k 个开关角, n为基波和各次谐波的次数。 求解方程组可得到一组在[0,π/2]区间内的脉冲波开关角,再由输出波形的奇谐对称性,可以求得整个周期内的开关角位置。 采用这组开关角控制逆变器,其输出PWM 波形保证了基波幅值为规定的数值,同时也使N-1个指定阶次的谐波幅值为零(N个开关角解N个方程,可以决定一个基波幅值以及N-1个指定阶次的谐波幅值)。 式中开关角应满足:
对于三相对称系统,三的整数倍次谐波因同相而被自动消除,故上中的 n 只对非三的整数倍的奇数才有意义,所以有:
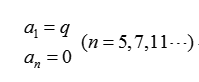
上公式双极性输出三相特定消谐数学模型。 式中共有 N 个独立变量a1,a2,…,aN,最多可消除 N-1个非三的倍数次的低次谐波。
综上可知,特定谐波消除技术的数学模型是一组非线性方程组,具有如下特点:
1. 方程组非线性,自变量以三角函数形式存在;
2. 求解只能采用数值方法求解,且求解过程较复杂;
3. 传统的牛顿迭代法由于其局部收敛性使求解对初值要求严格,且求解速度慢,收敛性差。
基于以上因素的影响,使在线求解开关角受到限制,限制了该技术的实时应用。
通过以上建模分析可知,特定消谐 PWM 的核心是非线性方程组的求解,只能通过数值方法迭代求解,通常对迭代序列有三个要求:
1. 迭代序列的适定性。 即要求迭代程序得到的解要满足定义域的要求。
2. 迭代序列的收敛性。 即要求迭代序列随迭代次数的增加收敛于方程的精确解。
3. 迭代序列的收敛速度与效率。 迭代序列收敛的快慢及计算时间的长短是衡量迭代法优劣的主要指标。
目前,牛顿迭代法是常用的特定消谐方程求解方法。 作者建立了SHEPWM的simulink仿真模型,将牛顿迭代求解开关角的方法写成函数形式,在选取四分之一周期的开关角N之后,通过该函数离线计算各调制度下的开关角曲线,形成lookup
table。 在三相两电平逆变器上验证该SHEPWM调制算法。
Simulink仿真模型文件:
该Simulink模型主要包含一下内容:
a.编写了牛顿同伦子函数SHEPWM_Angle_Cal_TongLun.m
函数输入(N,m)分别为四分之一开关角个数,调制度数组。
b. 编写了牛顿迭代子函数SHEPWM_Angle_Cal_Newton.m
函数输入(N,m,Angle_init)分别为四分之一开关角个数,调制度数组,各个调制度对应的开关角初值Angle_init为(Nlength(m))维数组,输出值为Nlength(m)维数组,对应调制度m取值不同时的N个开关角度。
c.编写主函数SHEPWM_Modulation.m,该函数被仿真模型TwoLevelInverter_SHEPWM.slx自动调用,根据对开关角个数的取值N,
计算不同调制度对应的开关角矩阵。
d.搭建仿真模型TwoLevelInverter_SHEPWM.slx,该仿真模型自动调用主函数SHEPWM_Modulation.m,根据对开关角个数取值N,
计算不同调制度对应的开关角矩阵。 界面如下:
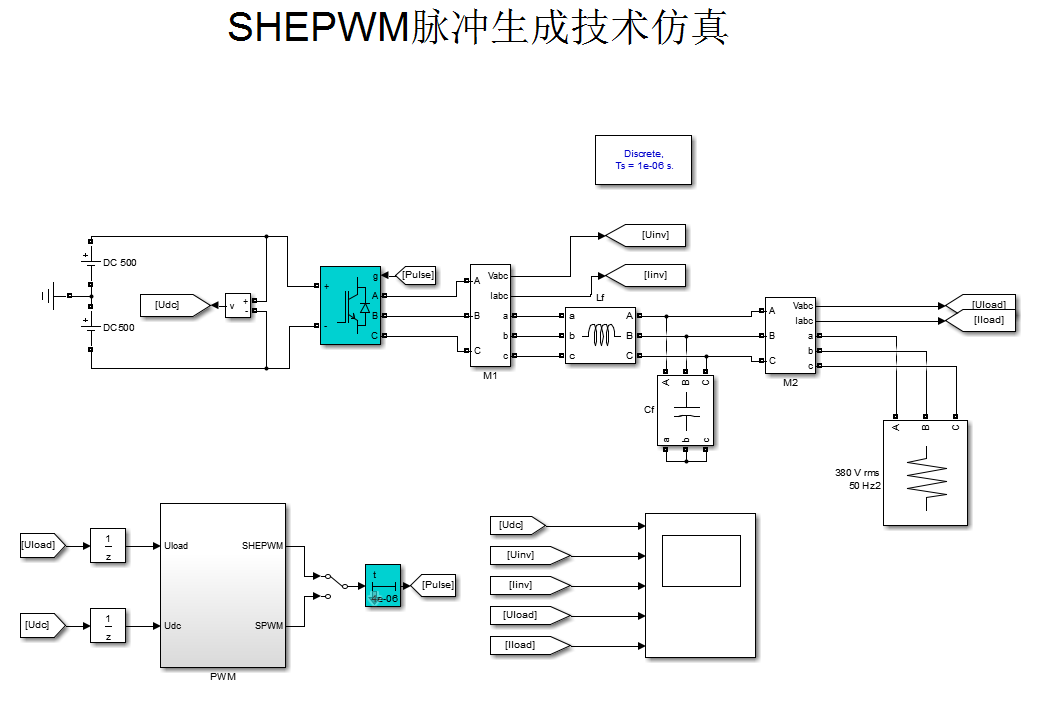
主要分为三相两电平逆变电路及其负载,示波器部分,和调制部分。 其中包含SHEPWM调制以及SPWM调制,通过手控开关切换。 SHEPWM调制部分如下:
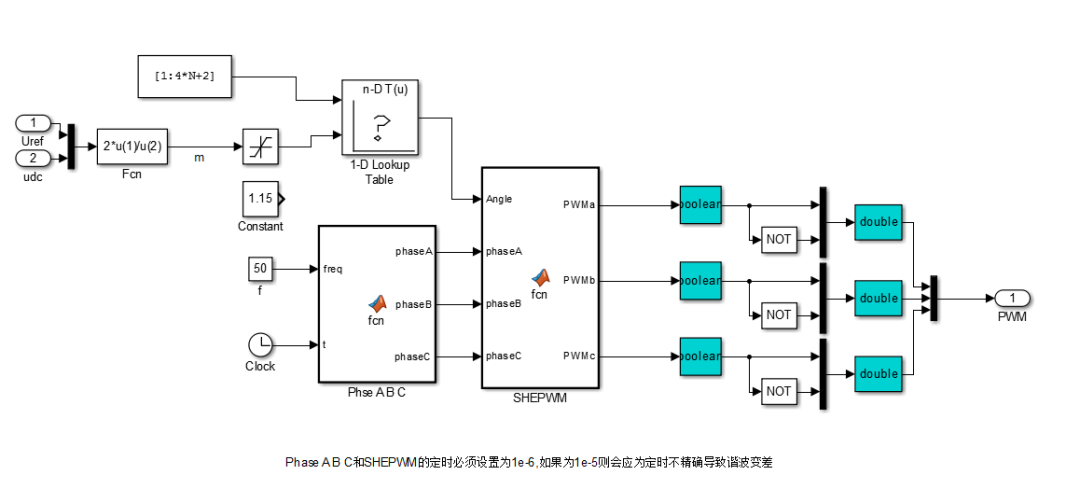
通过主函数SHEPWM_Modulation.m得到不同调制度对应的开关角矩阵。 插入上图的查表模块中,根据不同的调制度输入,得到SHEPWM脉冲。 波形如下。
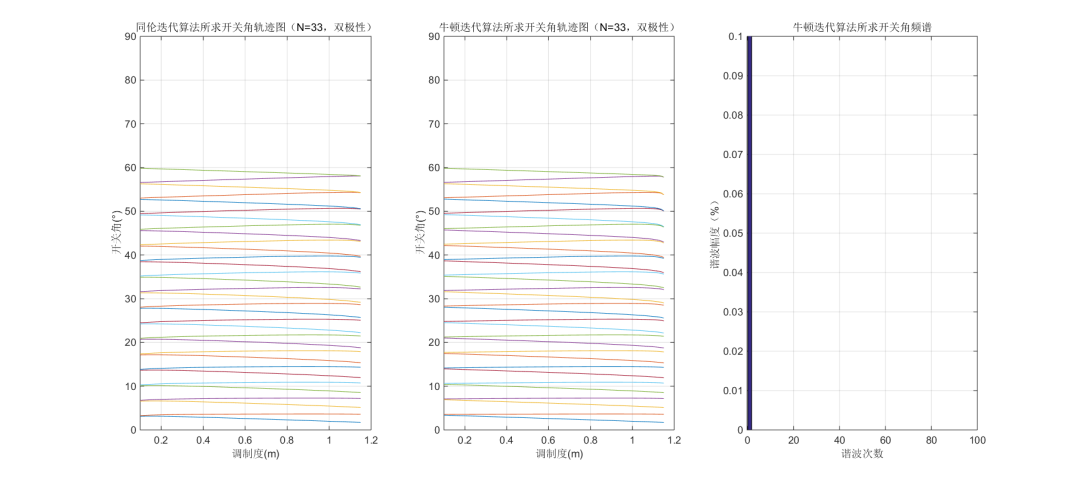
a.N取值33时,运行仿真模型,模型调用SHEPWM_Modulation.m后会计算SHEPWM开关角的同时,会输出如下同伦迭代算法所求开关角轨迹图和牛顿迭代算法所求开关角轨迹图。
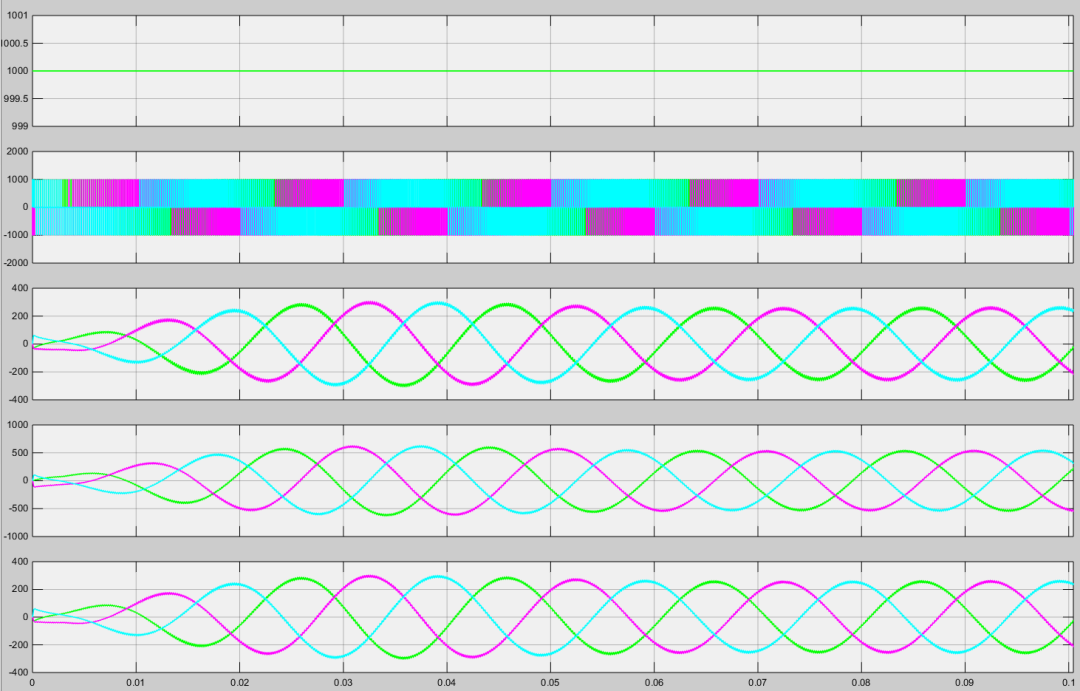
b. 直流侧电压,LC滤波器前输出电压,LC滤波器前输出电流,LC滤波器后输出电压,LC滤波器后输出电流波形如下:
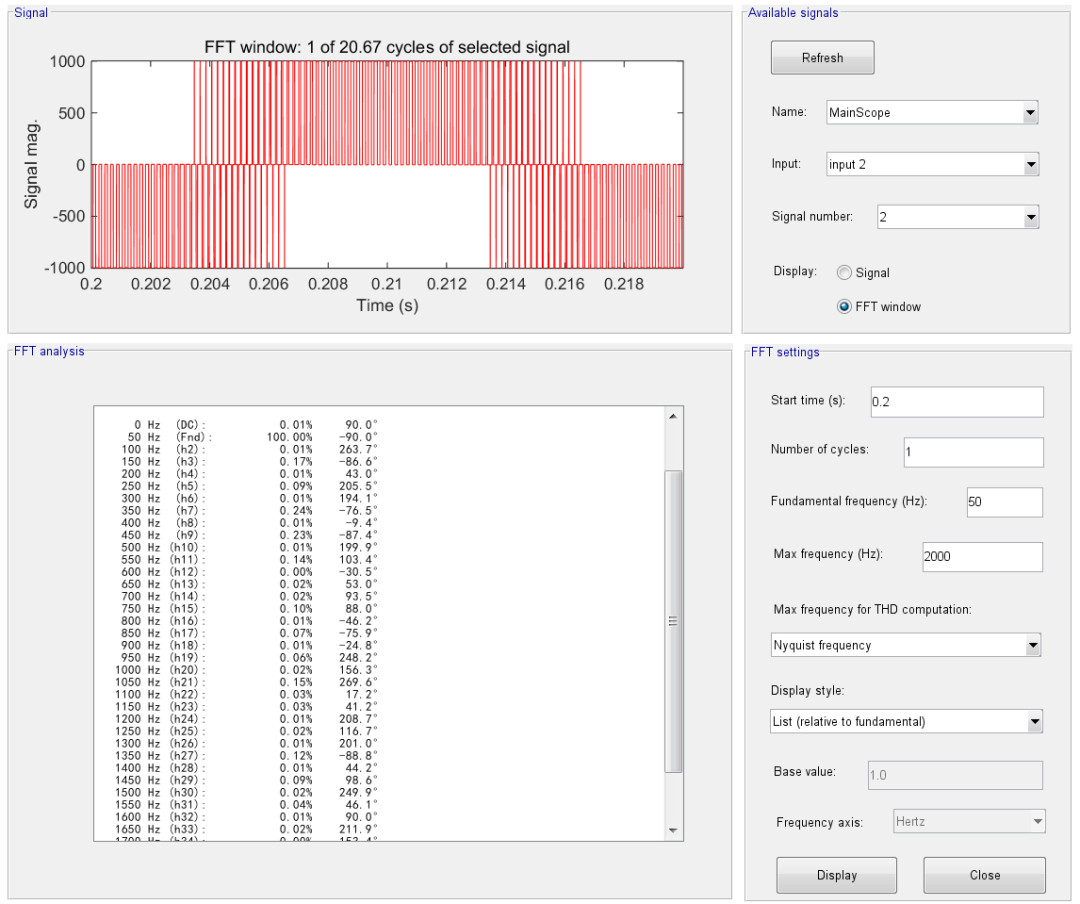
c. 滤波前输出电压谐波如下:
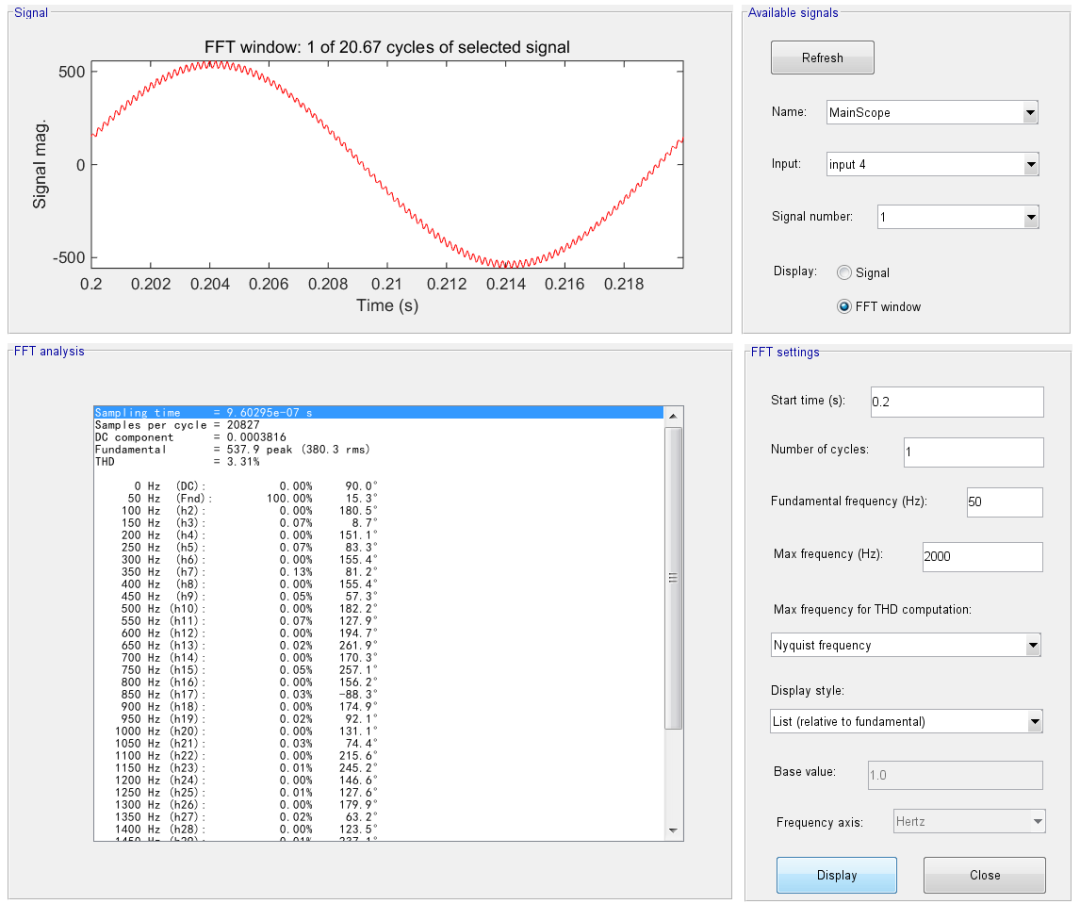
d. 滤波后输出电压谐波如下:
该模型使用十分方便,对四分之一周期取不同开关角时,只需要修改主函数m文件中N的定义即可求解,另外m文件中包含了丰富的注释,便于理解算法。
-
PWM
+关注
关注
114文章
5203浏览量
215100 -
逆变器
+关注
关注
288文章
4764浏览量
207999 -
仿真
+关注
关注
50文章
4134浏览量
134124 -
Simulink
+关注
关注
22文章
536浏览量
62772 -
SHEPWM
+关注
关注
0文章
8浏览量
8090
发布评论请先 登录
相关推荐
永磁同步电机模型预测控制Simulink仿真教程资料下载
SPWM的基本原理是什么?
线性电源的基本原理是什么
无线充电的基本原理是什么
磁悬浮列车牵引控制的Simulink仿真
如何使用SIMULINK对SVPWM算法进行仿真
Buck电路的基本原理,Simulink模型的获取方式
永磁同步电机FOC控制的基本原理及Matlab/Simulink仿真分析
SVPWM控制技术的基本原理及Matlab/Simulink仿真分析






 工商网监
工商网监
评论