 基于数据的缺陷检测工具
基于数据的缺陷检测工具
基于数据的缺陷检测工具
一、为什么选择ADASINSPECTOR
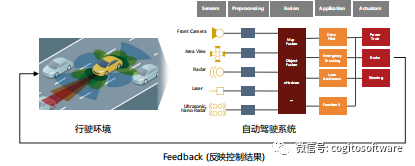
ADAS,客观、高效地测试自动驾驶功能
传感器输入数据的匹配性是必须的,因此很难根据现有测试输入的输出值进行比较测试
几乎不可能生成匹配的输入数据
仿真或是实车行驶测试的必须性
难以再现场景、发现缺陷
实现基于驾驶员判断的主观验证

ADAS,客观高效地测试自动驾驶功能!
能够基于数据进行客观、定量的评估,并能够根据数据确定缺陷的原因和依据
通过基于数据的自动发现功能自动发现缺陷—降低人力成本
最大限度地提高验证效率
可以发现人类无法识别的缺陷
二、需求
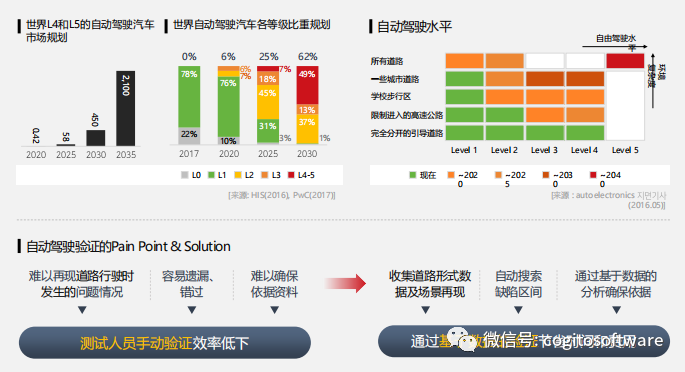
随着验证需求的增加,需要ADAS&自动驾驶验证方法
ADAS&自动驾驶功能的复杂度不断增加,基于测试人员认知的手动验证方法效率低下
由于功能错误发生条件以及发生错误时控制器状态信息不足导致难以改善错误
三、解决方案
基于数据的验证流程
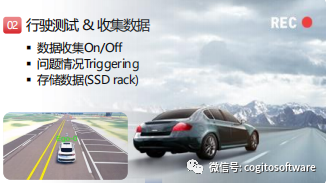
收集实车行驶数据→ 在实验室反复分析数据,验证多种场景
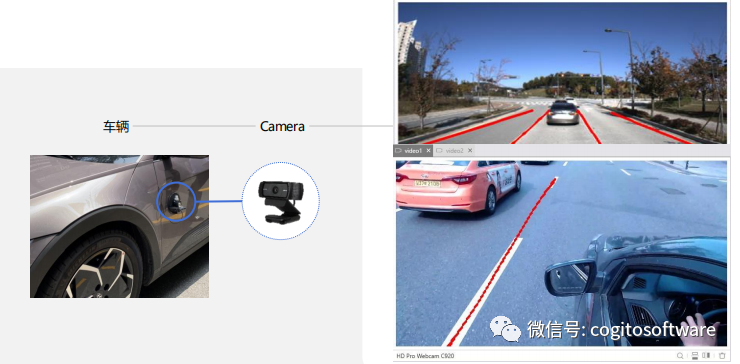
四、DrivingData Logger驾驶数据记录仪
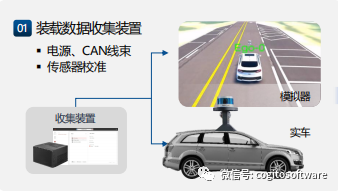
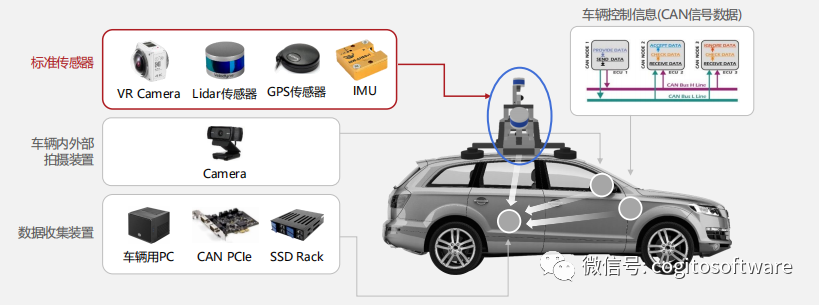
1、用于收集车辆外部数据的传感器–Sensor Box
用于收集外部环境数据的传感器的构成
: Lidar, VR影像,GPS
可装载于各种车型的设计,具备高度调节功能
分析缺陷时,生成可作为依据的数据
: 行驶环境影像、客体识别及距离预测(相机+雷达传感器结合)

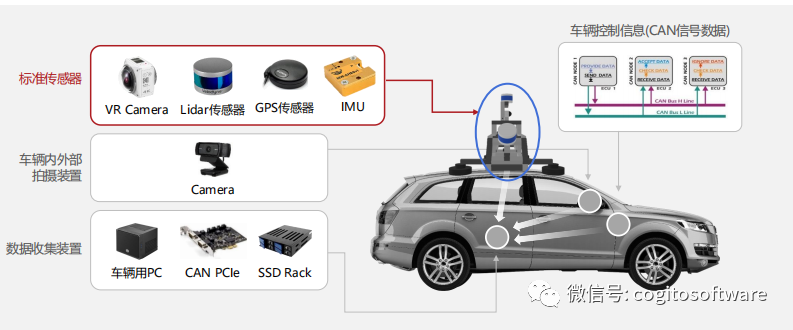
2、车辆内/外部数据收集装置–收集器PC

收集车辆控制信息及比较标准数据
: 车辆内部数据-CAN数据(ADAS信号,车辆控制信号),内部影像
: 车辆外部数据– 4KVR影像,雷达,GPS
: 支持收集渠道间的时间同步
通过收集器控制台监测收集状态,记录问题发生时间
: 记录收集开始、结束及现在时间
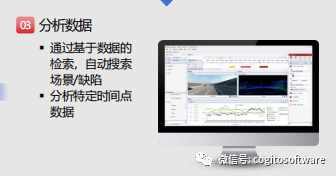
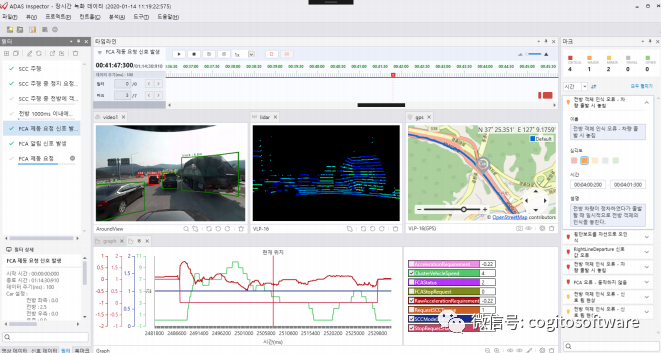
五、DrivingData Analyzer驾驶数据分析器
1、画面可视化便于解析数据– 影像, pointcloud,图表,地图
提供时间轴功能,可以在收集的驾驶数据之间进行逐帧分析
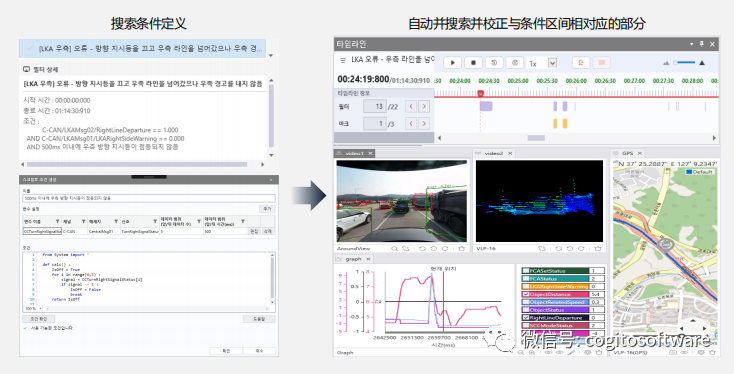
提供通过查询数据条件自动搜索场景/缺陷区间的功能
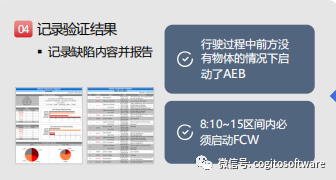
针对问题区间进行缺陷记录管理并生成报告
2、利用过滤功能自动搜索场景/缺陷
支持基于数据进行条件搜索
-在拍摄的全部数据中自动找出并记录符合条件的区间
例)搜索在70km/h的行驶过程中进入车辆前方20m以内的区间
可生成数据值比较条件、复杂的脚本条件组合的过滤
提供移至过滤结果部分的功能
3、运用人工智能和传感器融合技术,提供周围客体距离数据
传感器盒中的参考传感器(相机、雷达)之间的传感器融合
提供对象识别和识别对象之间的距离数据
可分析全部或特定的某一帧画面
分析结果可用作过滤条件分析

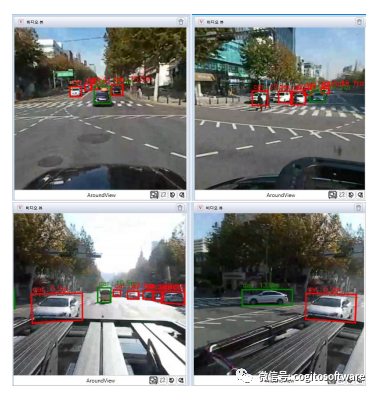
4、利用人工智能和图像处理技术提供车道距离数据
通过分析传感器箱中的车道识别摄像头数据
提供到车道的距离数据-提供左右车道和基点的距离数据
可分析特定帧和整个视频
可将分析结果用作筛选条件
六、规范
七、参考
机器人产业促进局投入了机器人软件可靠性评估系统

SAIMO,中国自动驾驶国家标准(GBT)验证解决方案

审核编辑 :李倩
-
传感器
+关注
关注
2553文章
51511浏览量
757264 -
自动驾驶
+关注
关注
785文章
13954浏览量
167255 -
检测工具
+关注
关注
0文章
21浏览量
2069
原文标题:Suresoft::ADAS INSPECTOR
文章出处:【微信号:哲想软件,微信公众号:哲想软件】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
邦纳基于iVu的彩色视觉检测工具
mp3芯片检测工具
U盘扩容检测工具-软件






 工商网监
工商网监
评论