 AI视觉分析技术在电动自行车闯红灯自动抓拍的应用
AI视觉分析技术在电动自行车闯红灯自动抓拍的应用
一、背景介绍:
摩托车、电动二轮车因其速度快、性能差、保护措施差,闯红灯极易发生交通事故,一般摩托车、电动车在发生交通事故时,由于速度惯性与保护措施差,人体往往是头部先向前撞击和跌落,往往造成严重的交通安全事故,这也是摩托车、电动车事故死亡率、致残率高的主要原因。我司采用AI人工智能机器视觉分析识别技术,通过采集路口网络视频摄像头的实时视频,使用AI算法检测红黄绿灯状态,在红灯状态时抓拍骑电动二轮车闯红灯行为,并触发行为过程录像取证,可选配在现场发出闯红灯语音提醒,从而促使人们在骑车出行时正确通过红绿灯路口,进而养成习惯,为营造一个安全、有序的道路交通安全环境贡献一份力量。
二、部署方式:
由于电动二轮车车牌尺寸较小,建议在路口安装800W像素摄像头(部分小型路口可采用400W 像素摄像头),根据路口与监控中心网络带宽实际情况,有光纤网络环境的采用后端服务器分析方式,否则可采用4G互联网模式AI终端边缘计算方式联网运行。
三、功能介绍:
3.1视频源管理:
AI边缘分析终端支持按ONVIF协议搜索添加局域网内的网络摄像头
3.2算法规则管理:
支持选中通道后,添加“车辆闯红灯”算法规则,并选择自动二轮车类别,在编辑规则时,支持绘制布控区,设置算法阈值联动方式,联动动作支持输出继电器开关、联动录像、联动语音提醒。
3.3事件记录与上传:
AI边缘分析终端实时视频分析检测红绿灯状态,并在红灯状态时识别电动二轮车闯红灯行为,触发抓拍1-3张图片(可设置),联动录像记录电动二轮车闯红灯行为过程,在本地记录或语音提醒,同时支持自动上传后端平台。
3.4本地化浏览:
AI边缘分析终端开机后便进行主界面,主界面包括视频区、抓拍事件区、事件列表区,视频区实时显示每路的视频分析实况,检测细节和对象框绘制叠加显示 ,产生抓拍事件时,则将抓拍信信显示在抓拍事件区(含图片和时间、地点、事件类型等信息)

终端AI设备主界面
3.5算法说明:
“闯红灯抓拍”算法特点在摩托车、电动二轮车像素最小要求100*100,人员像素最小要求80*80,头盔像素最小要求 60*60以上的场景上,支持各种场景,红黄绿类检测率可达99.9%以上,闯红灯行为识别率可达99.5以上,电动二轮车车牌最小像素100*60场景下,车牌识别率可达99%以上。
审核编辑黄宇
-
摄像头
+关注
关注
60文章
4841浏览量
95691 -
AI
+关注
关注
87文章
30887浏览量
269066
发布评论请先 登录
相关推荐
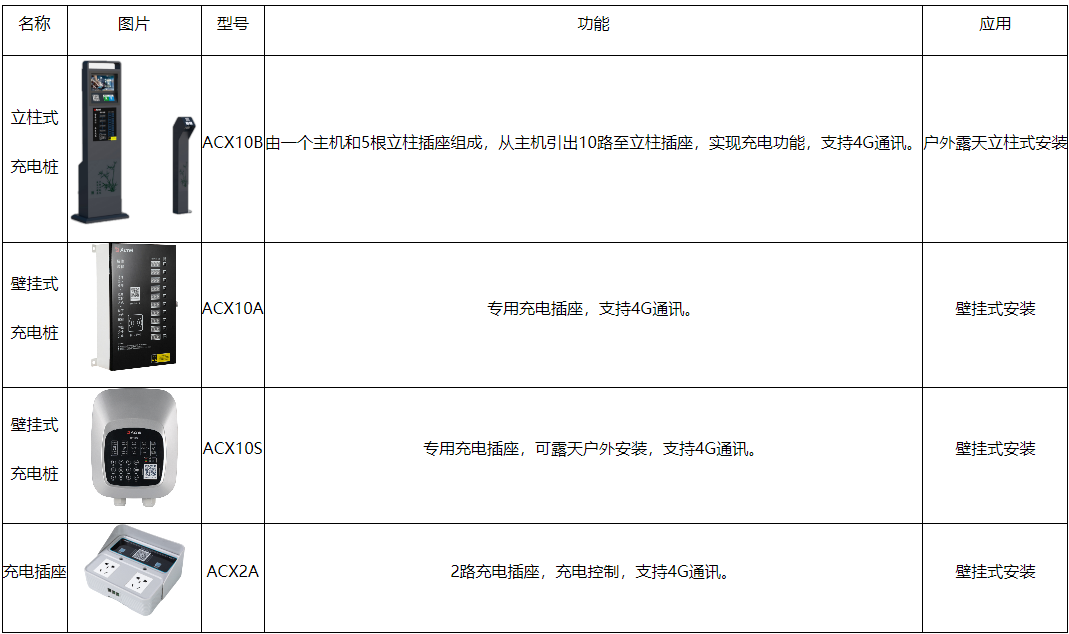
电动自行车充电桩智慧消防监管平台:守护安全,智领未来
智慧消防监管平台下的办公园区电动自行车充电桩消防方案
朗凯威锂电池组定制在电动自行车中的应用

户外电动车充电桩智能消防控制箱:电动自行车安全的守护者
电动自行车充电桩用电安全消防系统平台的重要性
电动自行车调速转把原理分析
探索光耦:光耦——电动自行车安全与智能的坚实保障

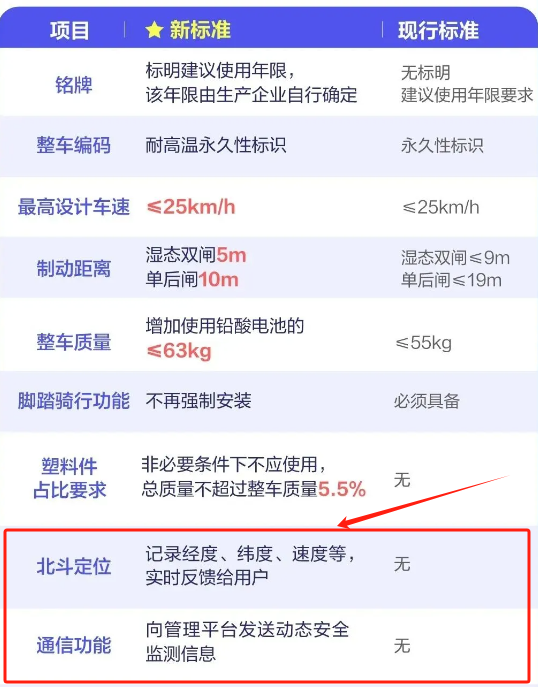
2024电动自行车新国标修订最新消息
AI技术高效赋能电动自行车安全治理



电动自行车电池质检监控管理系统解决方案

电动自行车如何改变我们的出行方式?探索电动自行车的绿色革命与安全升级!






 工商网监
工商网监
评论