 用于快速高保真RGB-D表面重建的神经特征网格优化的GO-Surf
用于快速高保真RGB-D表面重建的神经特征网格优化的GO-Surf
摘要
我们提出了GO-Surf,一种直接的特征网格优化方法,用于从RGB-D序列中准确和快速地重建表面。我们用一个学习过的分层特征体素网格对底层场景进行建模,该网格封装了多层次的几何和外观局部信息。
特征向量被直接优化,以便在三线插值后,由两个浅层MLP解码为有符号的距离和辐射度值,并通过体积渲染进行渲染,使合成的RGB/深度值与观察到的RGB/深度值之间的差异最小。
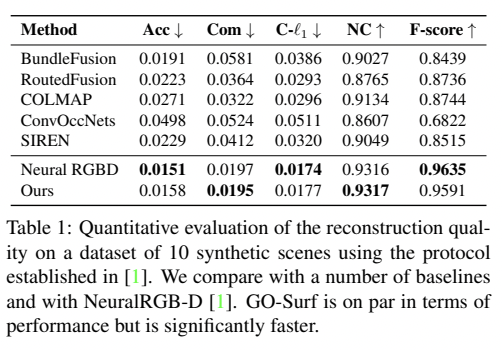
我们的监督信号--RGB、深度和近似的SDF--可以直接从输入图像中获得,不需要任何融合或后处理。我们制定了一个新的SDF梯度正则化项,鼓励表面光滑和孔洞填充,同时保持高频细节。GO-Surf可以在15-45分钟内优化1-2K帧的序列,比基于MLP表示的最相关方法NeuralRGB-D的速度提高了60倍,同时在标准基准上保持同等的性能。
主要贡献: GO-Surf将可学习的特征网格引入RGB-D序列的SDF重建中,以实现: (i) 在交互式运行时间内快速优化 (ii) 高精度的表面重建。 我们还首次在体素网格的背景下应用Eikonal和平滑度正则化条款。
主要方法
给定一个输入的RGB-D序列,GO-Surf通过直接优化一个多分辨率的特征网格和有符号的距离值以及颜色预测来获得高质量的三维表面重建。
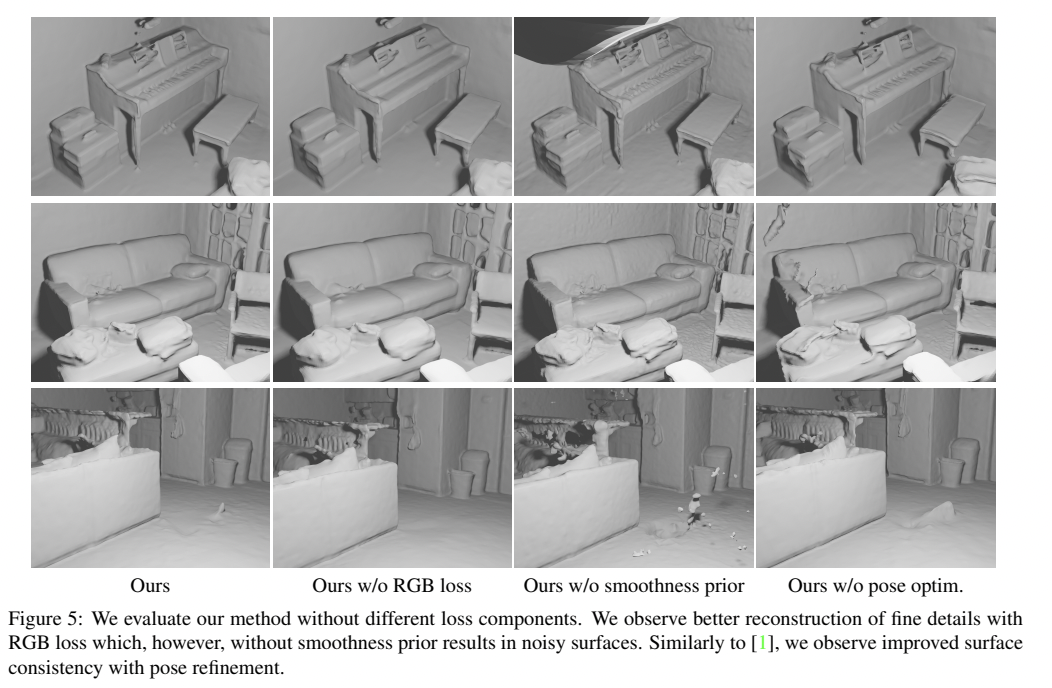
我们在有符号距离值上制定了一个新的平滑度先验,从而在保留细节的同时,改善了孔洞填充和平滑度特性。我们的优化比基于MLP的方法快×60倍。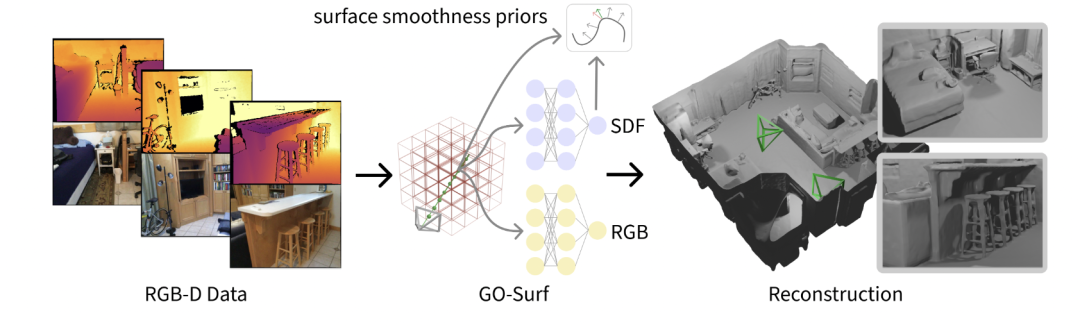
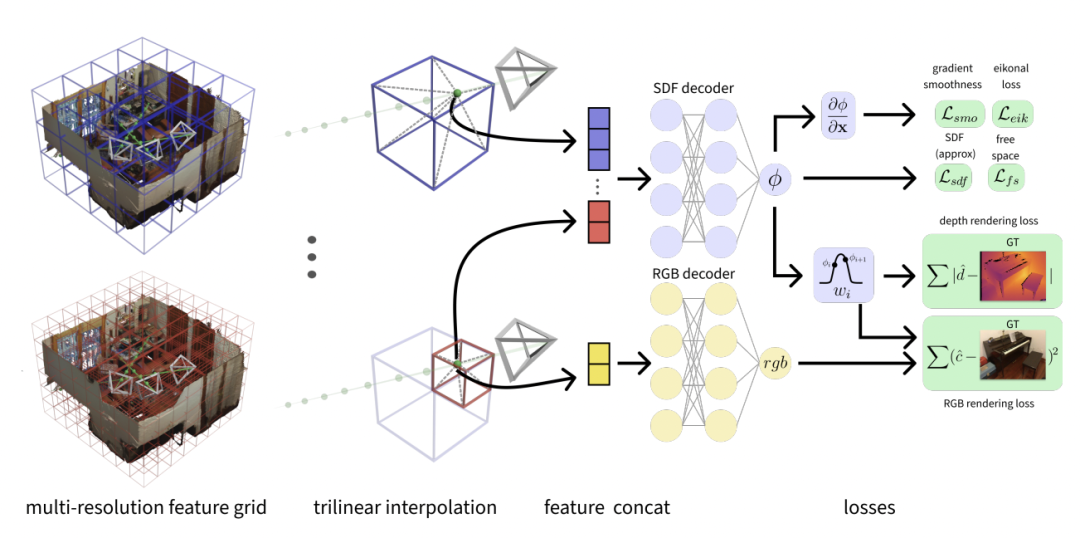
GO-Surf使用多级特征网格和两个浅层MLP解码器。给定一个沿射线的采样点,每个网格通过三线插值进行查询。多级特征被串联并解码为SDF,并用于计算样本权重。颜色是由最细的网格单独解码的。
损失项被应用于SDF值,并渲染深度和颜色。在每个查询点计算SDF的梯度,并用于Eikonal和平滑度正则化。
主要结果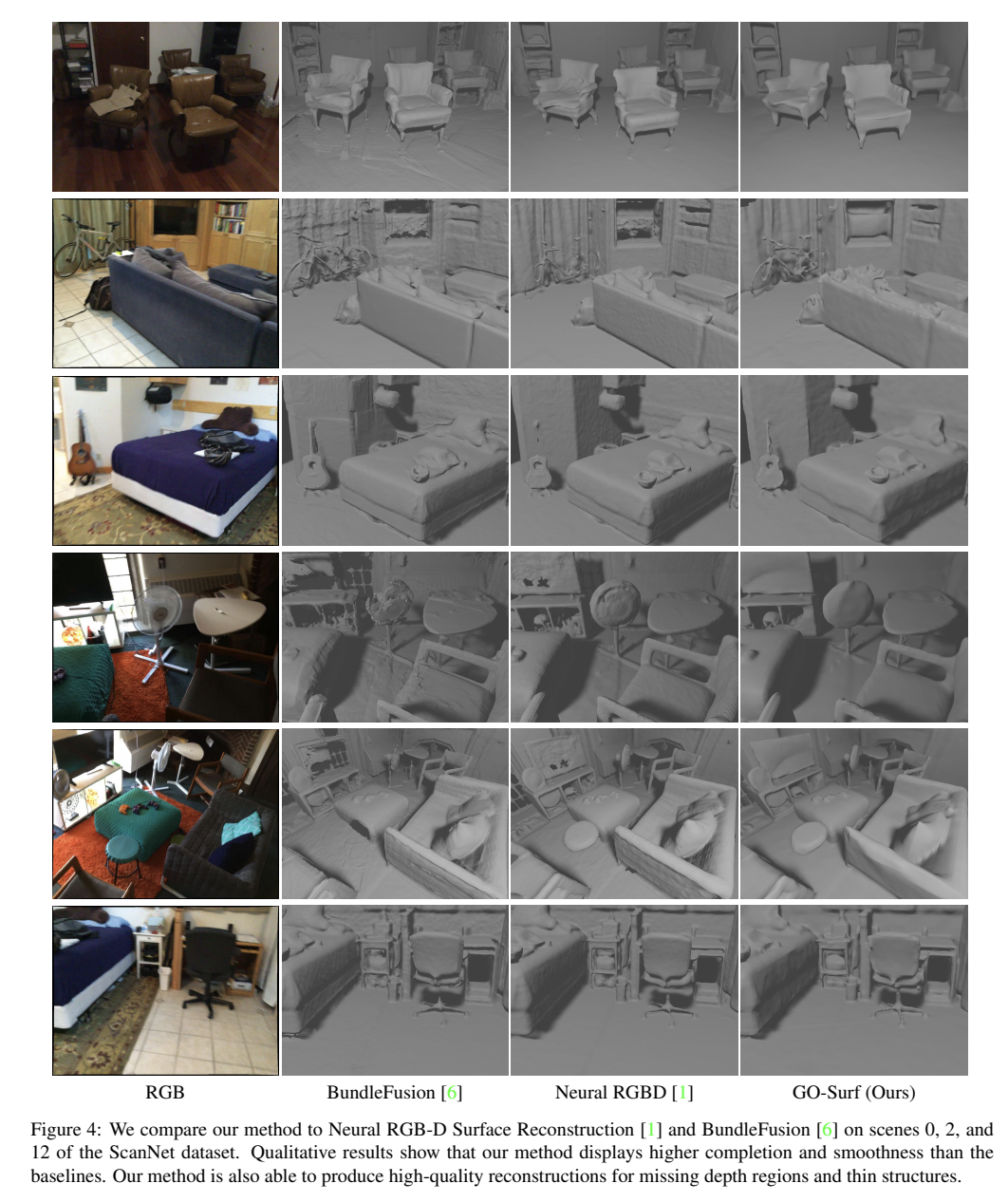
审核编辑:刘清
-
解码器
+关注
关注
9文章
1153浏览量
40989 -
RGB
+关注
关注
4文章
801浏览量
58761 -
MLP
+关注
关注
0文章
57浏览量
4309
原文标题:3DV2022 | GO-Surf: 用于快速、高保真RGB-D表面重建的神经特征网格优化
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

如何去开发一款基于RGB-D相机与机械臂的三维重建无序抓取系统
什么是高保真耳机
基于RGB-D图像物体识别方法
基于STL曲面网格重建算法
基于RGB-D相机的三维重建和传统SFM和SLAM算法有什么区别?
GO-Surf: 用于快速、高保真RGB-D表面重建的神经特征网格优化
生成高质量 3D 网格,从重建到生成式 AI
基于3D形状重建网络的机器人抓取规划方法

一种基于RGB-D图像序列的协同隐式神经同步定位与建图(SLAM)系统

手持RGB-D传感器广泛应用的情况
常用的RGB-D SLAM解决方案






 工商网监
工商网监
评论