 汽车车载网络技术论文
汽车车载网络技术论文
一、方案概述:
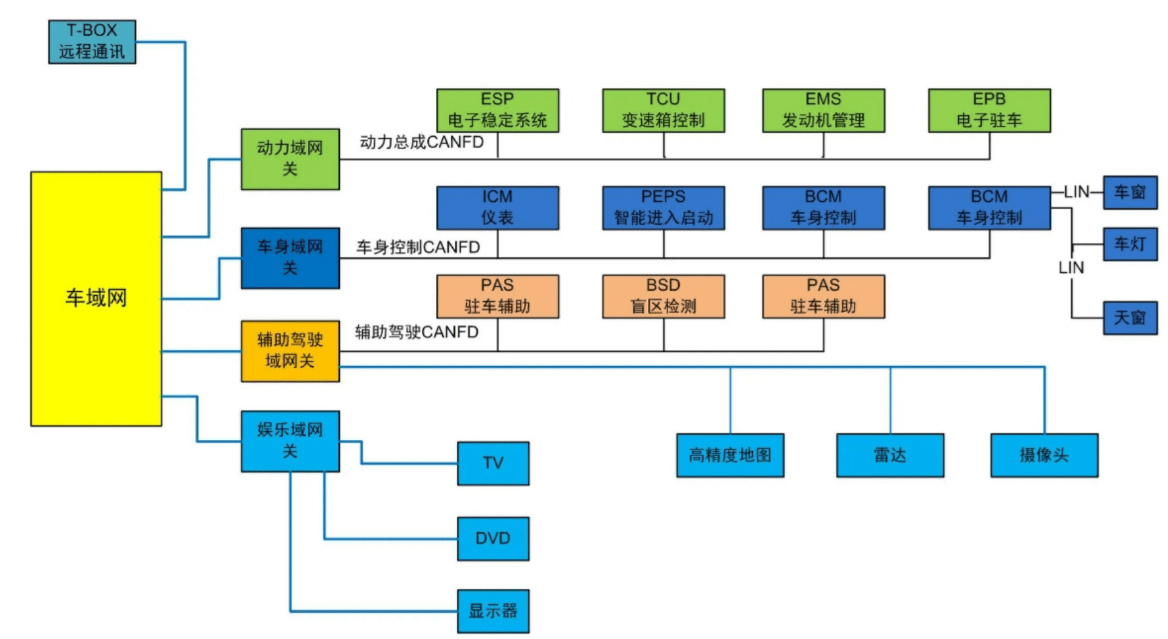
随着电控系统的日益复杂,以及对汽车内部控制功能电控单元相互之间通信能力要求的日益增长采用点对点的链接会使得车内线束增多,这样在考虑内部通讯的可靠性安全性以及重量方面都给汽车设计和制造带来了很大的困扰。因此为了减少车内连线实现数据的共享和快速交换,同时提高可靠性等方面在快速发展的计算机网络上,实现CAN、LAN、LIN、MOST等基础构造的汽车电子网络系统,即车载网络。
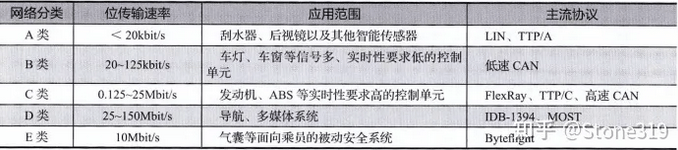
目前各个国家和公司存在多种车载网络标准。美国汽车工程师学会(SAE)按照汽车上网络系统的性能,把汽车网络划分为不同的等级标准,即A类、B类、C类、D类和E类。
二、发展趋势:
车载网络技术的存在是提高汽车的效率这样复杂的操作简单化通过高科技控制汽车,提高汽车的安全系数和用户满意程度。高科技汽车厂商纷纷研发出了独立的网络系统。未来车载网络技术的发展趋势仍然是以简化为主,向着高精尖不断进步,不断提高系统的性能。
三、结构和原理
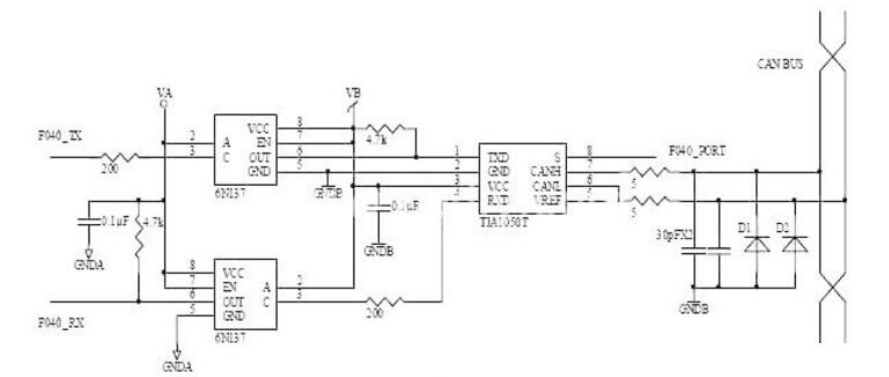
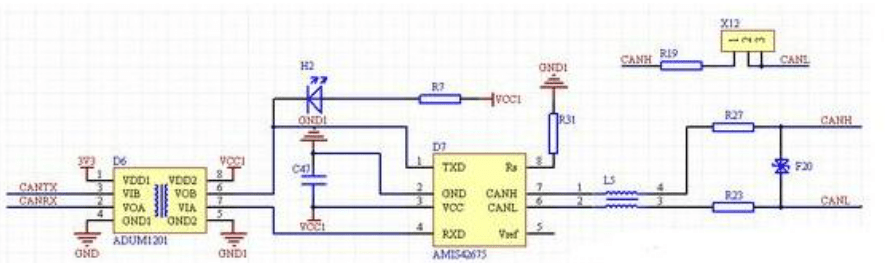
(一)CAN(Controller Area Network)控制器局域网
CAN总线是德国BOSCH公司从80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。通信速率最高可达1Mbps。
CAN总线特点:1.数据通信没有主从之分,任意一个节点可以向任何其他(一个或多个)节点发起数据通信,靠各个节点信息优先级先后顺序来决定通信次序,高优先级节点信息在134μs通信; 2.多个节点同时发起通信时,优先级低的避让优先级高的,不会对通信线路造成拥塞;3. 通信距离最远可达10KM(速率低于5Kbps)速率可达到1Mbps(通信距离小于40M);4. CAN总线传输介质可以是双绞线,同轴电缆。CAN总线适用于大数据量短距离通信或者长距离小数据量,实时性要求比较高,多主多从或者各个节点平等的现场中使用。
(二)LIN(Local Interconnect Network)局域互联网络
LIN协会创建于1998年末,最初的发起人为为宝马、Volvo、奥迪、VW、戴 姆勒-克莱斯勒、摩托罗拉和 VCT等,五家汽车制造商,一家半导体厂商以及一家软件工具制造商。该协会将主要目的集中在定义一套开放的标准,该标准主要针对车辆中低成本的内部互联网络(LIN, local interconnect networks),这些地方无论是带宽还是复杂性都不必要用到CAN网络。
LIN标准包括了传输协议的定义、传输媒质、开发工具间的接口、以及和软件应用程序间的接口。LIN提升了系统结构的灵活性,并且无论从硬件还是软件角度而言,都为网络中的节点提供了相互操作性,并可预见获得更好的EMC(电磁兼容)特性。
LIN补充了当前的车辆内部多重网络,并且为实现车内网络的分级提供了条件,这可以有助于车辆获得更好的性能并降低成本。LIN协议致力于满足分布式系统中快速增长的对软件的复杂性、可实现性、可维护性所提出的要求,它将通过提供一系列高度自动化的工具链来满足这一要求。
(三)MOST(Media Oriented Systems Transport)多媒体定向系统传输
面向媒体的系统传输(Media Oriented Systems Transport,MOST)是在汽车制造商和供应商中越来越受推崇的一种网络标准。MOST网络以光纤为载体,通常是环型拓扑。MOST可提供高达25Mbps的集合带宽,远远高于传统汽车网络。也就是说,可以同时播放15个不同的音频流。因此主要应用在汽车信息娱乐系统。
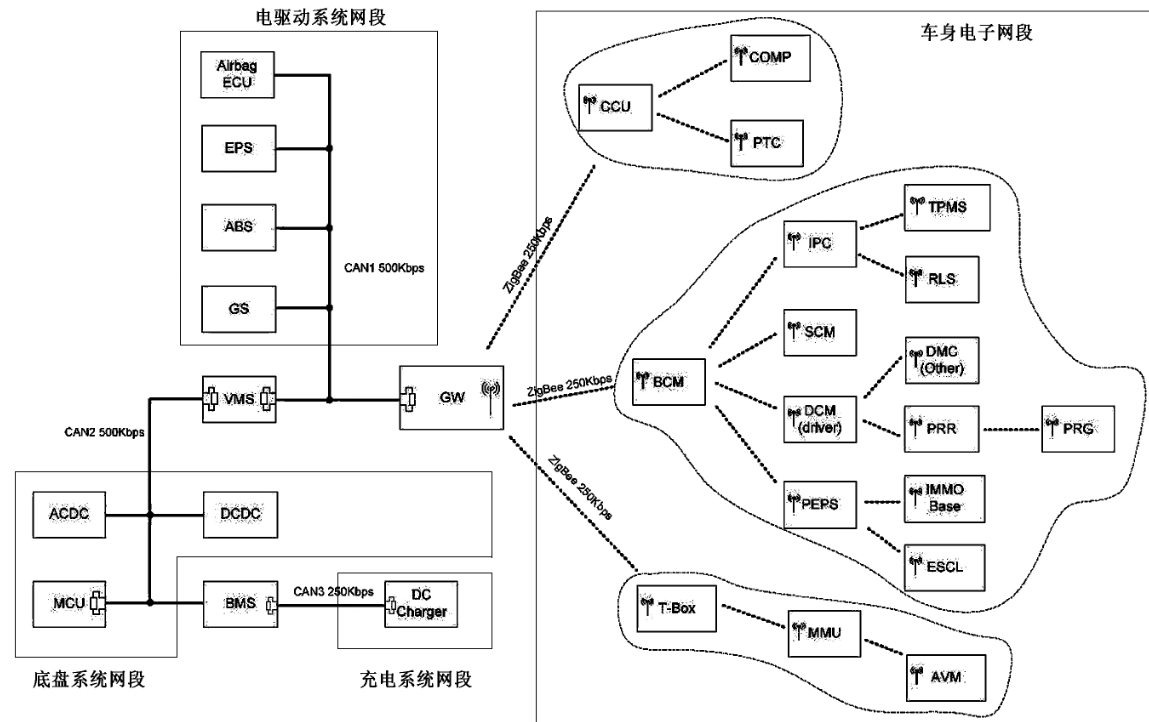
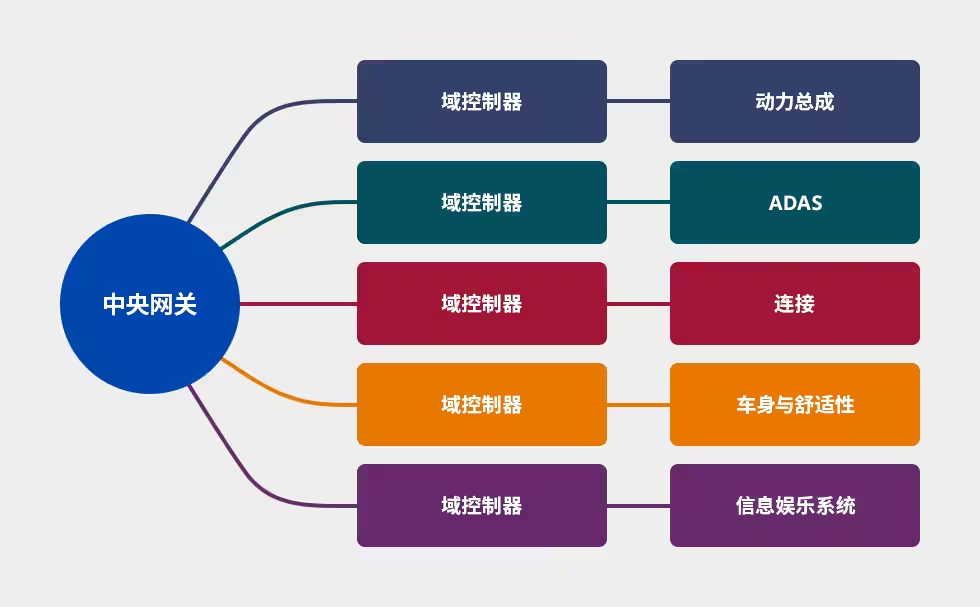
开发车载网络一般需要仿真开发工具,比如CANOE,PFautoCAN等,车载网络是个非常复杂的系统,里面同时存在多重通讯网络。常见的有CAN总线,而即便是CAN总线也会分不同速率的CAN总线,比如,动力系统的发动机控制、变速箱控制等,会采用高速的500K CAN总线控制,舒适系统的,比如,门、灯、窗的控制,会采用低速的125K的CAN总线控制。
三、车载网络厂牌推荐
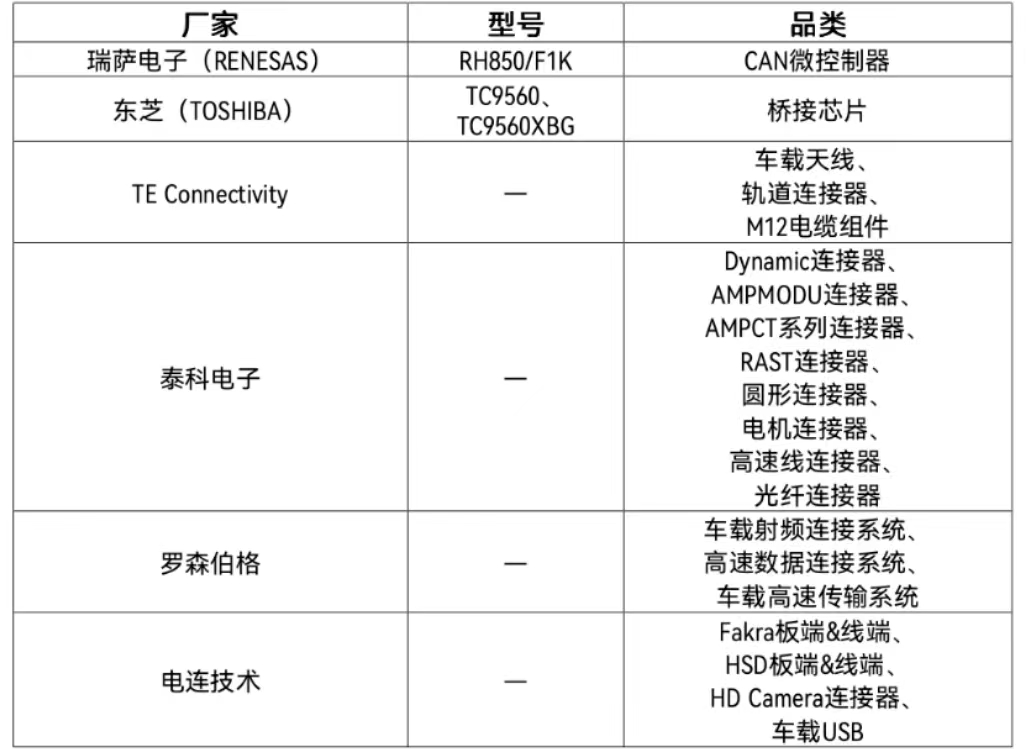
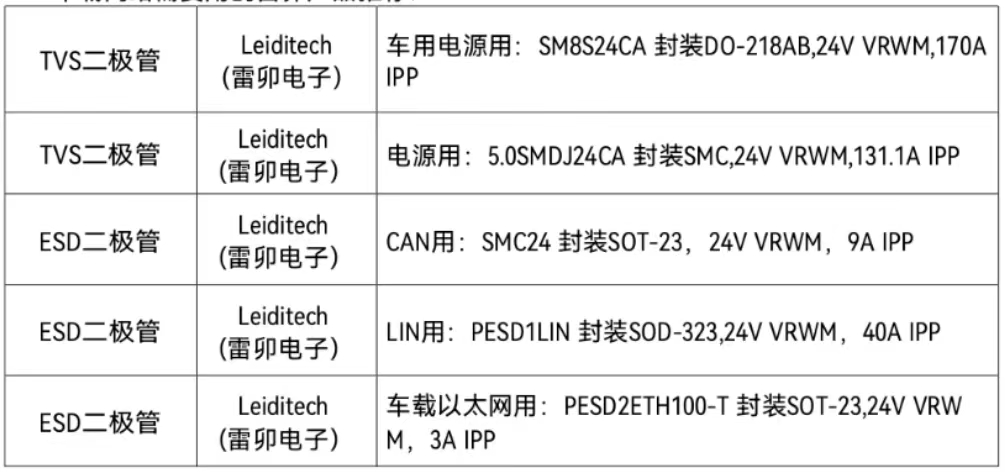
车载网络需要用的雷卯产品推荐:
审核编辑黄宇
-
车载网络
+关注
关注
6文章
159浏览量
31776 -
汽车
+关注
关注
13文章
3507浏览量
37292
发布评论请先 登录
相关推荐
mesh网络技术的优缺点
是德科技亮相第三届车载网络和通信架构技术及标准研讨会
工业主板在矿车车载设备中的应用
车载以太网的优势和应用
解决方案丨PPEC车载DCDC转换器:新能源汽车的高效能源动力系统
一文读懂 | 新能源汽车车载电源深度解析
一文读懂 | 新能源汽车车载OBC
小小噪声滤波器,应对车载网络大挑战

新能源汽车的车载充电机(OBC)内部构造

车载网络协议与串扰问题

新能源汽车车载充电机(OBC)拓扑结构分析
中国智能汽车车载计算芯片落地场景研究


叉车车载终端定制_基于MT6762安卓核心板的车载终端设备解决方案






 工商网监
工商网监
评论