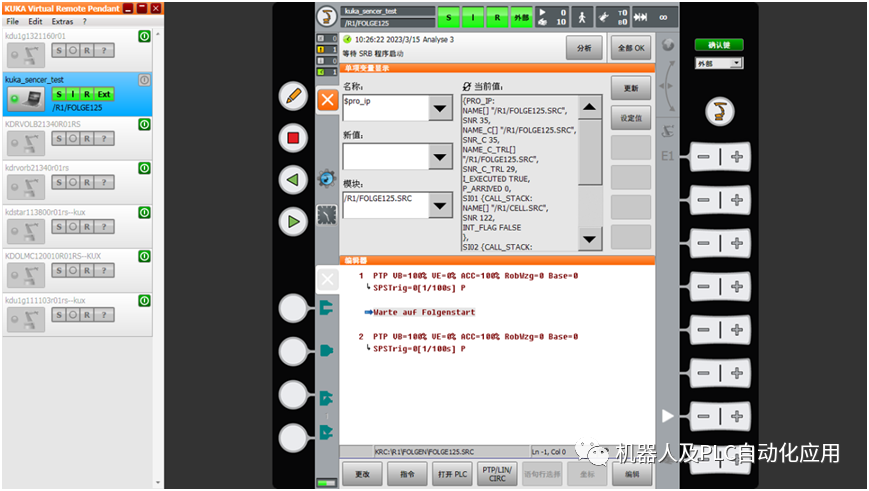
 KUKA的$PRO_IP变量简析
KUKA的$PRO_IP变量简析
其中包含引用解释器的进程指针的数据.
变量包含接下来将在解释器中执行的块的数据。
根据特定的解释器,访问数据的方式如下:
读取机器人程序中的变量是指机器人在解释器中的状态。
在提交程序中读取变量是指关联的提交解释器的状态。
通过变量校正函数读取/写入变量是指$INTERPRETER的当前值。
$INTERPRETER的可能值取决于机器人控制器所处的提交模式。
机器人控制器处于单次提交模式(默认操作模式):
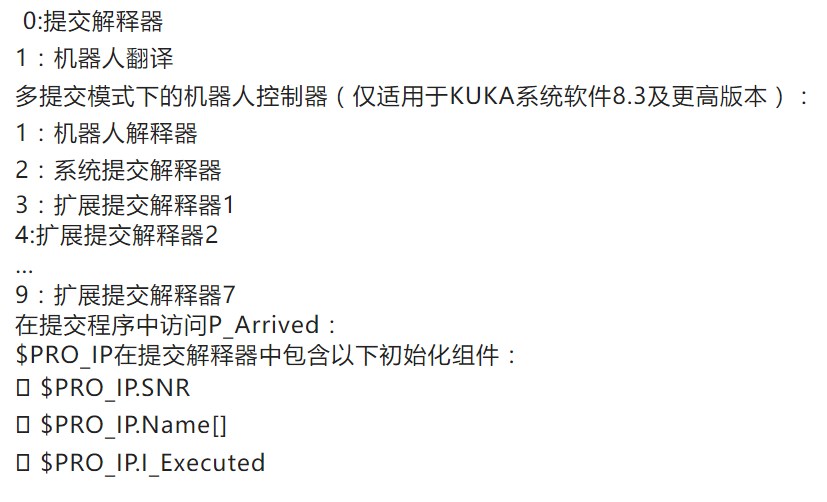
0:提交解释器
1:机器人翻译
多提交模式下的机器人控制器(仅适用于KUKA系统软件8.3及更高版本):
1:机器人解释器
2:系统提交解释器
3:扩展提交解释器1
4:扩展提交解释器2 … 9:扩展提交解释器7
提交程序中访问P_Arrived: $PRO_IP在提交解释器中包含以下初始化组件:
$PRO_IP.SNR $PRO_IP.Name[] $PRO_IP.I_Executed
组件$PRO_IP.P_Arrived未在子模块解释器中初始化。
在提交程序中读取组件P_Arrived会触发错误消息{$variable}值无效。
为了能够读取提交程序中的机器人解释器组件P_Arrived,必须使用变量$PRO_IP1:
IF ($PRO_IP1.P_Arrived == 1) THEN …
$PRO_IP= Process data
STRUC Pro_Ip CHAR name[32], INT snr, CHAR name_c[32], INT snr_c, BOOL i_executed, INT p_arrived, CHAR p_name[24], CALL_STACK S101, S102, …S110
| name[] | 解释器在其中进行预运行的模块的名称 |
| snr | 解释器在其中预先运行的块的编号(通常不等于程序) |
| name_c[] | 插值器所在的模块的名称 |
| snr_c | 插值器所在的块的编号 |
| i_executed | 指示解释器是否已经执行了块(=TRUE) |
| p_arrived |
指示机器人所在路径上的点(仅与运动指令相关) 0:到达运动的目标或辅助点 1:未达到目标点(机器人在路径上的某个位置) 2:不相关 3:到达CIRC或SCIRC行动的辅助点 4:在起点和辅助点之间的路段上移动 |
| p_name[] | 机器人所在的目标或辅助点的名称或集合 |
|
S101 … S110 |
解释器所在的调用方堆栈 |
审核编辑:刘清
-
控制器
+关注
关注
112文章
16351浏览量
177958 -
机器人
+关注
关注
211文章
28409浏览量
207026 -
KUKA
+关注
关注
3文章
217浏览量
16525 -
解释器
+关注
关注
0文章
103浏览量
6509
原文标题:KUKA 的$PRO_IP变量
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【设计技巧】rtos的核心原理简析
EPON技术简析
解读$PRO_IP当前KRL处理的处理指针


KUKA机器人系统变量$PRO_NAME所选程序的名称(参考解释器)
KUKA机器人程序诊断:显示调用方堆栈






 工商网监
工商网监
评论