 机器人通信系统基础知识
机器人通信系统基础知识
通信系统是用以完成信息传输过程的技术系统的总称。现代通信系统主要借助电磁波在自由空间的传播或在导引媒体中的传输机理来实现,前者称为无线通信系统,后者称为有线通信系统。
用电信号(或光信号)传输信息的系统,也称电信系统。系统通常是由具有特定功能、相互作用和相互依赖的若干单元组成的、完成统一目标的有机整体。最简便的通信系统供两点的用户彼此发送和接收信息。在一般通信系统内,用户可通过交换设备与系统内的其他用户进行通信。
用以完成信息传输过程的技术系统的总称。现代通信系统主要借助电磁波在自由空间的传播或在导引媒体中的传输机理来实现,前者称为无线通信系统,后者称为有线通信系统。
当电磁波的波长达到光波范围时,这样的电信系统特称为光通信系统,其他电磁波范围的通信系统则称为电磁通信系统,简称为电信系统。由于光的导引媒体采用特制的玻璃纤维,因此有线光通信系统又称光纤通信系统。
一般电磁波的导引媒体是导线,按其具体结构可分为电缆通信系统和明线通信系统;无线电信系统按其电磁波的波长则有微波通信系统与短波通信系统之分。
另一方面,按照通信业务的不同,通信系统又可分为电话通信系统、数据通信系统、传真通信系统和图像通信系统等。由于人们对通信的容量要求越来越高,对通信的业务要求越来越多样化,所以通信系统正迅速向着宽带化方向发展,而光纤通信系统将在通信网中发挥越来越重要的作用。
在机器人中,通信系统也是重要的组成部分之一。没有通信系统,传感器采集的机器人内外部信息不能送达机载计算机;没有通信系统,机载计算机的控制指令不能送达驱动部分,机器人将无法实现预期的运动。
通信系统帮助机器人各个组成部分建立起畅通的信息连接渠道,使机器人各个组成部分能够各司其职。因此,我们必须认真研究机器人的通信系统,让它充分发挥能动性,使机器人各个部分的沟通顺畅起来。
机器人通信系统简述
目前,机器人常用的通信模型有"客户/服务器"模型(简称C/S模型)和“点对点”模型(简称P2P模型)。
1.客户/服务器模型
n客户/服务器模型是所有网络应用的基础。客户/服务器分别指参与一次通信的两个应用实体,客户方主动地发起通信请求,服务器方被动地等待通信的建立。
基于Socket连接的客户端与服务器之间的通信模型图如上图所示,整个通信过程如下所示:
(1) 服务器端首先启动监听程序,对指定的端口进行监听,等待接收客户端的连接请求;
(2)客户端程序启动,请求连接服务器的指定端口;
(3)服务器收到客户端的连接请求后与客户端建立套接字(Socket)连接;
(4)连接成功后,客户端与服务器分别打开两个流,其中客户端的输入流连接到服务器端的输出流,服务器的输入流连接到客户端的输出流,两边的流连接成功后就可以进行双向通信了。
(5)当通信完毕后,客户端与服务器端两边各自断开连接。
注: 套接字(Socket):是一种相互通信计算机之间的双向端口,具体包括主机的IP地址,服务类型,TCP/IP协议的端口。其中,TCP/IP协议的端口就是描述网络通信发送和接收的进程的标识信息,具体说就是为信息的传说提供地点。当应用程序与端口绑定后,操作系统将收到的数据发送到端口指定的应用程序进程。每个端口有一个端口号的标识符,用来区分不同的端口。端口号可以是0~65535之间的任何数字。
0~255的端口号为系统的保留端口,用于系统进程的通信;
其他的端口是自由端口,可以为进程自由使用;
已定义的端口号:Tomcat 服务器的默认通信端口是8080;
MySQL默认的通信端口是3306;
SQLSERVER的默认通信端口是1433;
优点:
1.简化了执行体。可以在用户态服务器中构造各种各样的API,而不会有任何冲突或重复;可以很容易地加入新的API。
2.提高了可靠性。每个新的服务运行在内核之外,有自己的存储空间,这样可以免受其他服务的干扰,单个客户的失败不会使操作系统的其余部分崩溃。
3.为应用程序与服务间通过RPC调用进行通信提供了一致的方法,且没有限制其灵活性。函数桩(function stub)把消息传递进程对客户应用程序隐藏起来,函数桩是为了包装RPC调用的一小段代码。当通过一个API访问一个环境子系统或服务时,位于客户端应用程序中的函数桩把调用参数包作为一个消息发送给一个服务器子系统执行。
4.为分布式计算提供了适当的基础。典型地,分布式计算使用客户/服务器模块,通过分布的客户和服务器模块以及客户与服务器间的消息交换实现远程过程调用。对于Windows,本地服务器可以代表本地客户应用程序给远程服务器传递一条消息,客户不需要知道请求是在本地还是在远程得到服务的。实际上,一条请求是在本地还是远程得到服务,可以基于当前负载条件和动态配置的变化而动态变化。
2.点对点模型
点对点通信只能实现网内任意两个用户之间的信息交换。点对点的通信时,只有一个用户可收到信息。作为一种计算机网络以通信模式,点对点通信中的两台计算机处在同等地位,有时也称对等网络(Peer to Peer Network)。它们共享网络资源,每台机器都以同样的方式作用于对方。在对等网络中,所有计算机既是服务器又是客户机。
特点:点对点通信中每个节点和其他节点之间都有线路连接。每个节点均可单独对外通信,不需要经过其他节点的传递。
优点:造价低廉,它允许数据和计算机分布在一个大的范围内,允许用户动态地安排计算要求。
缺点:文件的位置不确定,网络管理比较困难。
机器人通信系统工作机理
根据前面介绍的常用通信模型和通信方式,C/S模型,设置一个中心控制器来处理有关智能体通信和控制的信息.此时其他智能体只需保存通信控制器的地址在控制器上设置一个用于存储各智能体相关信息的数据库以及与控制相关的调度机构。每个智能体在启动时将自己的相关信息登记在控制器数据库中,在运行时根据需要将变化的状态信息更新到数据库中,调度机构根据这些信息产生控制调度的信号对智能体进行调度和控制,并在退出时删除自己的信息;在需要其他智能体信息时则向控制器询问。这样,整个机器人控制系统中只需要保存一份动态智能体信息,且各智能体的地址、能力,状态信息等可以按需改变而不会引起系统的紊乱,便于实现系统的动态扩展。
直接通信的机制要求发送Agent和接收Agent同时在线,它们之间道循CAN总线通信协议。为7克服C/S模型的缺点,缓解中心服务器的工作负荷过大的问题,采取实时调度算法,提高C/S模型的容错能力.
机器人通信技术的分类
1.蓝牙无线通信技术
工作原理:
蓝牙是一种开放的低成本的、短距离无线连接技术规范的代称,主要用于传送语音数据。
蓝牙通信的主从关系
蓝牙技术规定每一对设备之间进行蓝牙通讯时,必须一个为主角色,另一为从角色,才能进行通信,通信时,必须由主端进行查找,发起配对,建链成功后,双方即可收发数据。理论上,一个蓝牙主端设备,可同时与7个蓝牙从端设备进行通讯。一个具备蓝牙通讯功能的设备, 可以在两个角色间切换,平时工作在从模式,等待其它主设备来连接,需要时,转换为主模式,向其它设备发起呼叫。一个蓝牙设备以主模式发起呼叫时,需要知道对方的蓝牙地址,配对密码等信息,配对完成后,可直接发起呼叫。
蓝牙的呼叫过程
蓝牙主端设备发起呼叫,首先是查找,找出周围处于可被查找的蓝牙设备。主端设备找到从端蓝牙设备后,与从端蓝牙设备进行配对,此时需要输入从端设备的 PIN码,也有设备不需要输入PIN码。配对完成后,从端蓝牙设备会记录主端设备的信任信息,此时主端即可向从端设备发起呼叫,已配对的设备在下次呼叫时,不再需要重新配对。已配对的设备,做为从端的蓝牙耳机也可以发起建链请求,但做数据通讯的蓝牙模块一般不发起呼叫。链路建立成功后,主从两端之间即可进行双向的数据或语音通讯。在通信状态下,主端和从端设备都可以发起断链,断开蓝牙链路。
蓝牙一对一的串口数据传输应用
蓝牙数据传输应用中,一对一串口数据通讯是最常见的应用之一,蓝牙设备在出厂前即提前设好两个蓝牙设备之间的配对信息,主端预存有从端设备的PIN码、地址等,两端设备加电即自动建链,透明串口传输,无需外围电路干预。一对一应用中从端设备可以设为两种类型,一是静默状态,即只能与指定的主端通信,不被别的蓝牙设备查找;二是开发状态,既可被指定主端查找,也可以被别的蓝牙设备查找建链。
蓝牙协议体系结构主要包括蓝牙核心协议(基带、LMP、L2CAP、SDP)、串口仿真协议(RFCOMM)、电话传送控制协议(TCS),以及可选协议(PPP、TCP/IP、OBEX、WAP、IrMC)等。为了使远程设备上的对应应用程序能够实现互操作功能,SIG为蓝牙应用模型定义了完整的协议栈,如图:
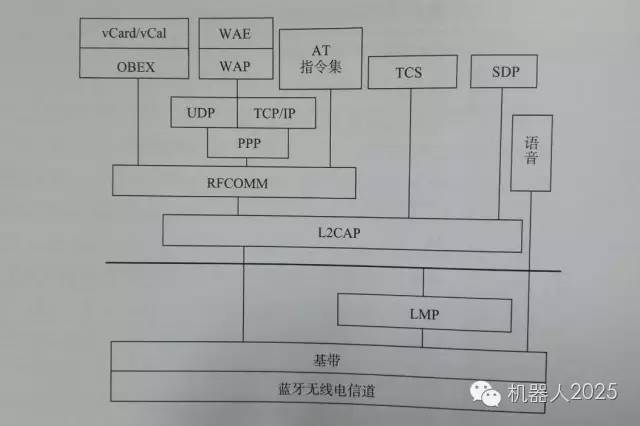
协议栈的各种单元(协议、层、应用等)在逻辑上被分为三组:传输协议、中间协议、应用组。
2.超带宽无线通信技术
随着无线通信技术的发展,人们对高速短距离无线通信的要求越来越高。超宽带(UWB)技术的出现,实现了短距离内超带宽、高速的数据传输。其调制方式和多址技术的特点使得它具有其他无线通信技术所无法具有的很宽的带宽、高速的数据传输、功耗低、安全性能高等特点。本文介绍了UWB的主要技术特点,并把UWB与目前较为广泛使用的IEEE 802.11、Bluetooth等短距离无线通信技术进行了比较,最后对UWB的应用前景进行了分析与展望。
特点:
UWB是一种“特立独行”的无线通信技术,它将会为无线局域网LAN和个人局域网PAN的接口卡和接入技术带来低功耗、高带宽并且相对简单的无线通信技术。UWB具有以下特点:
抗干扰性能强
UWB信号,在发射时将微弱的无线电脉冲信号分散在宽阔的频带中,输出功率甚至低于普通设备产生的噪声。接收时将信号能量还原出来,在解扩过程中产生扩频增益。因此,与IEEE 802.11a、IEEE 802.11b和蓝牙相比,在同等码速条件下,UWB具有更强的抗干扰性。
传输速率高
UWB的数据速率可以达到几十兆比特每秒到几百兆比特每秒,有望高于蓝牙100倍,也可以高于IEEE 802.11a和IEEE802.11b。
带宽极宽
UWB使用的带宽在1GHz以上,高达几吉赫兹,并且可以和目前的窄带通信系统同时工作而互不干扰。这在频率资源日益紧张的今天。开辟了一种新的时域无线电资源。
频谱利用率高,系统容量大
因为不需要产生正弦载波信号,可以直接发射冲激序列,因而UWB系统具有很宽的频谱和很低的平均功率,有利于与其他系统共存,从而提高频谱利用率,带来了极大的系统容量。
发射功率低
在短距离的通信应用中,超宽带发射机的发射功率通常可做到低于1mW,从理论上而言,超宽带信号所产生的干扰仅仅相当于一宽带的白噪声。这样有助于超宽带与现有窄带通信之间的良好共存,对于提高无线频谱的利用率具有很大的意义,更好的缓解日益紧张的无线频谱资源问题。并且超宽带信号的隐蔽性较强,不容易被发现和拦截,具有较高的保密性[1] 。
保密性好
UWB保密性表现在两方面:一方面是采用跳时扩频,接收机只有已知发送端扩频码时才能解出发射数据;另一方面是系统的发射功率谱密度极低。用传统的接收机无法接收。
通信距离短
信号传输受到距离的影响和高频信号强度会衰减很快,因此超宽频带的使用更加适用于短距离之间的通信。
多径分辨率极高
因为其采用的是持续时间极短的窄脉冲,所以其时间上和空间上的分辨率都是极强的,方便进行测距、定位、跟踪等活动的开展,并且窄脉冲具有良好的穿透性,所遇超宽带在红外通信中也得到广泛的使用。
便携
此技术使用基带传输,无需射频调制和解调,因此其设备功耗小,成本也较低,灵活的使用特性也使其更适合于便携型无线通信的使用。
3.ZigBee无线通信技术
Zigbee是基于IEEE802.15.4标准的低功耗个域网协议。根据这个协议规定的技术是一种短距离、低功耗的无线通信技术。这一名称来源于蜜蜂的八字舞,由于蜜蜂(bee)是靠飞翔和“嗡嗡”(zig)地抖动翅膀的“舞蹈”来与同伴传递花粉所在方位信息,也就是说蜜蜂依靠这样的方式构成了群体中的通信网络。其特点是近距离、低复杂度、自组织、低功耗、低数据速率、低成本。主要适合用于自动控制和远程控制领域,可以嵌入各种设备。简而言之,ZigBee就是一种便宜的,低功耗的近距离无线组网通讯技术。
特点:功耗低、成本低、时延短、容量大、可靠性高、安全性好、工作频段灵活、自主能力强;
ZigBee无线通信的信息处理
4.Wi-Fi无线通信技术
Wi-Fi,即WirelessFidelity,译为无线相容性认证,它的的正式名称是“IEEE802.11b”,与蓝牙一样,同属于在办公室和家庭中使用的短距离无线技术。该技术使用的使2.4GHz附近的频段,该频段目前尚属没用许可的无线频段。其目前可使用的标准有两个,分别是IEEE802.11a和 IEEE802.11b。该技术由于有着自身的优点,因此受到厂商的青睐。虽然在数据安全性方面,该技术比蓝牙技术要差一些,但是在电波的覆盖范围方面则要略胜一筹。Wi-Fi的覆盖范围则可达300英尺左右,办公室自不用说,就是在小一点的整栋大楼中也可使用。
Wi-Fi技术突出的优势在于:
其一,无线电波的覆盖范围广,基于蓝牙技术的电波覆盖范围非常小,半径大约只有50英尺左右,约合15米,而Wi-Fi的半径则可达300英尺左右,约合100米,办公室自不用说,就是在整栋大楼中也可使用。最近,由Vivato公司推出的一款新型交换机。据悉,该款产品能够把目前Wi-Fi无线网络300英尺,接近100米的通信距离扩大到4英里,约6.5公里。
其二,虽然由Wi-Fi技术传输的无线通信质量不是很好,数据安全性能比蓝牙差一些,传输质量也有待改进,但传输速度非常快,可以达到11mbps,符合个人和社会信息化的需求。
其三,厂商进入该领域的门槛比较低。厂商只要在机场、车站、咖啡店、图书馆等人员较密集的地方设置“热点”,并通过高速线路将因特网接入上述场所。这样,由于“热点”所发射出的电波可以达到距接入点半径数十米至100米的地方,用户只要将支持无线LAN的笔记本电脑或PDA拿到该区域内,即可高速接入因特网。也就是说,厂商不用耗费资金来进行网络布线接入,从而节省了大量的成本。
Wi-Fi带来的高速无线上网将像今天人们打手机一样平常。各厂商目前都积极将该技术应用于从掌上电脑到桌面计算机的各种设备中,制造新的卖点。随着Wi-Fi设备数量的增加,其价格将会下降。Wi-Fi设备的全球年产量在2006年将达到3300万台。
Wi-Fi功能应用的领域:
由于WiFi的频段在世界范围内是无需任何电信运营执照的因此WLAN无线设备提供了一个世界范围内可以使用的,费用极其低廉且数据带宽极高的无线空中接口。用户可以在WiFi覆盖区域内快速浏览网页,随时随地接听拨打电话。而其它一些基于WLAN的宽带数据应用,如流媒体、网络游戏等功能更是值得用户期待。有了WiFi功能我们打长途电话(包括国际长途),浏览网页、收发电子邮件、音乐下载、数码照片传递等,再无需担心速度慢和花费高的问题。
WiFi在掌上设备上应用越来越广泛,而智能手机就是其中一份子。与早前应用于手机上的蓝牙技术不同,WiFi具有更大的覆盖范围和更高的传输速率,因此WiFi手机成为了目前移动通信业界的时尚潮流。现在WiFi的覆盖范围在国内越来越广泛了,高级宾馆,豪华住宅区,飞机场以及咖啡厅之类的区域都有WiFi接口。当我们去旅游,办公时,就可以在这些场所使用我们的掌上设备尽情网上冲浪了。
Wi-Fi技术主要用在家庭、学校或者办公场所。如果有一台带Wi-Fi功能的笔记本,人们就可以在50米之内无线连接上一个固定的接口,通过这个接口与其它计算机连接,或者上网冲浪。而对于投资商来说,wi-fi是什么?美国一家调查公司的数据显示,仅在去年,全世界售出了1500万个Wi-Fi适配器以及440万个接口设备。在个人用户对Wi-Fi的狂热的冲击下,很多公司也开始在机场、酒店、商店、餐厅等设立公共的“热点”, 以收取Wi-Fi接入费用。
在美国,也许最出名的Wi-Fi服务是由T-Mobile移动通讯公司经营的遍布2000多家星巴克咖啡厅的“热点”网络,每周有25000人通过这些“热点”上网,平均下来,一个“热点”每天只有不到两个人使用。而要让这些“热点”保持于互联网连通的状态,运营商每个月就要花费数百美元。荷兰阿姆斯特丹的斯基亚伯瑞利机场的Wi-Fi设备,每天只有十几个人在使用。但是,其运营商仍然认为,只要多设几个“热点”,就会使设备的使用率大增。他们遵循的还是互联网狂潮时期的逻辑“只要建起来了,人们自然就会来。”
公共Wi-Fi服务还存在一个最根本的问题:它们的目标消费群体――那些拿着笔记本电脑四处游走,并且需要抓紧每一分钟时间上网的人――其实少之又少。除非Wi-Fi功能能被整合到手机那样小巧的通讯工具当中,可以在任何时间任何地点使用,否则,其吸引大批消费者的可能性就非常小。
有咨询专家提出,目前这种情况下,Wi-Fi的投资者们应该好好考虑他们设立的“热点”那些才是切实有效,有可能赢利的。他建议重点应该放在商业用户身上。而针对普通消费者的服务,在目前没有多大意义。因为,对于普通消费者来讲,在咖啡厅、电影院、购物中心等地无线上网,实在是太不划算。而对于酒店、会议中心、机场等的拥有者来讲,设立一些无线上网接口还是有意义的。他们可以不用自己来运作这些接入设备,而请专业公司来运作。或者,他们可以将这作为一项免费服务,吸引顾客。
5.2.4 GHz 无线通信技术
2.4GHz无线技术,是一种短距离无线传输技术,供开源使用。2.4GHz所指的是一个工作频段,2.4GHz ISM(Industry Science Medicine)是全世界公开通用使用的无线频段,蓝牙技术即工作在这一频段,在2.4GHz频段下工作可以获得更大的使用范围和更强的抗干扰能力,目前广泛应用于家用及商用领域。
优势
适用范围广
它是一个全球性的频段,开发的产品具有全球通用性,各种无线产品均可使用此频段,目前广泛用于无线建设及无线宽带路由器等室内场合。
带宽高
它整体的频宽胜于其他ISM 频段,这就提高了整体数据传输速率,允许系统共存,允
许双向传输,且抗干扰性强,传输距离远(短距离无线技术范围)。
耗电低
2.4GHz无线电和天线的体积相当小,产品体积也更小,从而使芯片更集中,减少耗电。因2.4GHz无线技术的优势,各厂家不断推出新技术,也使此技术发展迅速。
-
无线通信
+关注
关注
58文章
4619浏览量
144064 -
通信系统
+关注
关注
6文章
1208浏览量
53561 -
电磁波
+关注
关注
21文章
1476浏览量
53987
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论