 舵机中的直流电机控制原理和方法
舵机中的直流电机控制原理和方法

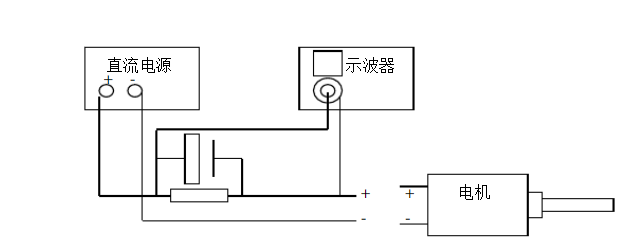
本文简单介绍在舵机中的直流电机控制原理和方法。下图是控制器原理图,单片机选择stm32f030,驱动选择fm116b,ldo为lp2992,这个可以任意选择兼容的芯片,电压反馈端用tl431进行分流稳压,确保反馈电阻器供电电压的稳定。
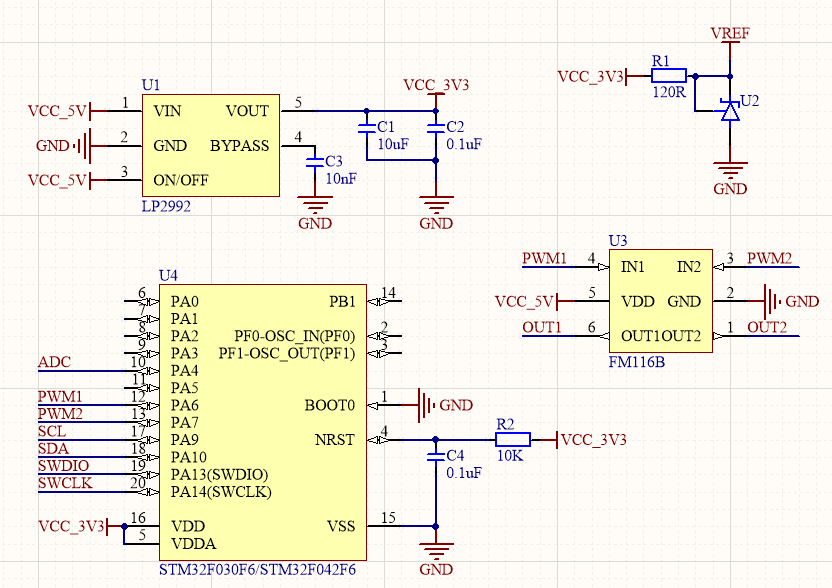
舵机的工作原理很简单,处理器实时获取电阻器的ADC值来计算获得当前的角度,如果与预期的角度一致,就不做任何操作,保持当前状态;如果与预期角度不同,就计算出当前角度与预期角度的差值,然后通过PID算法计算出控制量,根据控制量输出PWM控制电机旋转,随着电机旋转,实时角度会越来越接近预期值,控制输出也会越来越小,直到最后为0,就转到了预期的位置。
本方案通过I2C接口获取控制命令,可以实现比传统模拟方式更多的功能。
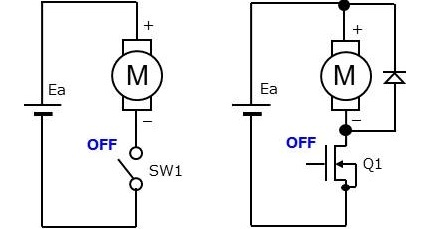
PWM1和PWM2控制电机转速和方向,当PWM1输出高电平而PWM2输出低电平就是正转,反之就是反转,如果二者都输出低电平就停止。
ADC值需要标定,确定舵机角度为0和180时的ADC采样值,这样才能通过比例计算出任意ADC值对应的角度。
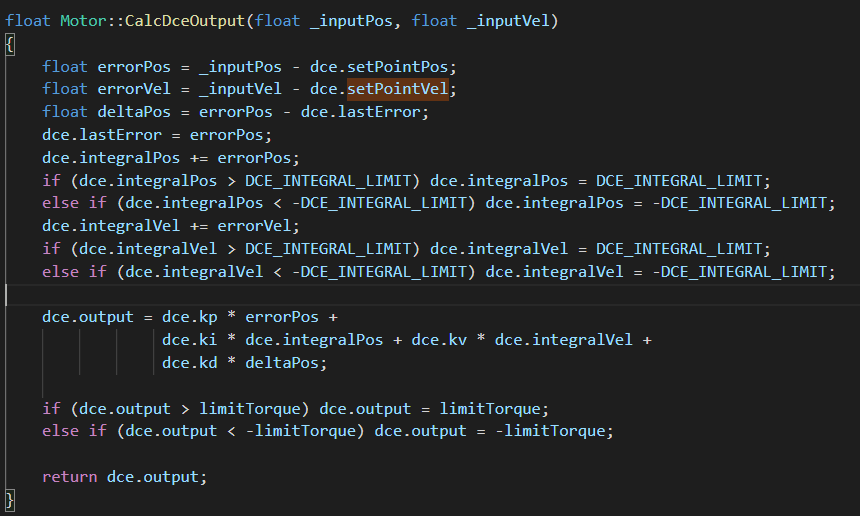
PID这里,ADC得到的角度减去预期角度就是角度差,乘以比例系数构成比例项;角度差的和乘以积分系数构成积分项,积分项要设置上限,防止该值过大影响响应速度;本次角度差与上一次的角度差的差乘以微分系数构成微分项(这里用固定的时间采样,dt固定,故不需要计算变化率了)。三者之和就是预期的输出值,再根据输出限制得到最终的输出值,该值可正可负,注意变量选取要合适。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6078文章
45624浏览量
675111 -
控制器
+关注
关注
114文章
17910浏览量
195729 -
直流电机
+关注
关注
36文章
1786浏览量
74327 -
adc
+关注
关注
100文章
7973浏览量
557327 -
舵机
+关注
关注
17文章
380浏览量
43434
发布评论请先 登录
相关推荐
热点推荐
动手玩转Arduino---运动控制(直流电机步进电机舵机)
动手玩转Arduino---运动控制(直流电机步进电机舵机)(电源技术是中文核心吗)-该文档为动手玩转Arduino---运动控制(
发表于 09-23 09:22
•37次下载

驱动有刷直流电机的简便方法
驱动有刷直流电机的简便方法本文将从非常基础的部分开始介绍驱动有刷直流电机的方法。可能大多数人都有在小学的理科实验中或手工作品中将电池连接到有
直流电机控制的基本方法
直流电机是一种最基本的电动机类型之一,其速度和方向可以通过控制电流来实现。直流电机常常作为工业控制系统的主要组成部分,其他领域也广泛应用。
直
发表于 03-26 22:21
•9948次阅读
直流电机及PWM介绍
直流电机是一种将电能转换为机械能的装置。一般的直流电机有两个电极,当电极正接时,电机正转,当电极反接时,电机反转
直流电机主要由永磁体(定
发表于 03-30 11:36
•3次下载
直流电机调速实验
直流电机是一种将电能转换为机械能的装置。一般的直流电机有两个电极,当电极正接时,电机正转,当电极反接时,电机反转。直流电机主要由永磁体(定子
发表于 03-30 14:14
•1次下载
永磁无刷直流电机的控制方法
永磁无刷直流电机(BLDCM)因其高效率、高功率密度、低维护成本等优点,在电动汽车、航空航天、工业自动化等领域得到了广泛应用。为了充分发挥永磁无刷直流电机的性能,采用合适的控制方法至关



评论