 触发器发展史及类型(上)
触发器发展史及类型(上)
在电子学中,触发器(Flip-Flop)或锁存器(latch)是具有两种稳定状态并可用于存储状态信息的电路,专业术语双稳态多谐振荡器(多谐振荡器是一种电子电路,用于实现各种简单的两态设备,例如张弛振荡器、定时器和触发器,bistable multivibrator)。该电路可以通过施加到一个或多个控制输入的信号来改变状态,并将具有一个或两个输出。它是时序逻辑中的基本存储元素。触发器和锁存器是计算机、通信和许多其他类型系统中使用的数字电子系统的基本组成部分。
触发器的线路图由逻辑门组合而成,其结构均由SR锁存器派生而来(广义的触发器包括锁存器)。触发器可以处理输入、输出信号和时序脉波(CK)之间的相互影响。这里的触发器特指flip-flop,flip-flop一词主要是指具有两个状态相互翻转,例如编程语言中使用flip-flop buffer(翻译作双缓冲)
触发器和锁存器用作数据存储元件。触发器是一种存储单个位(二进制位)数据的设备;它的两个状态之一代表“一”,另一个代表“零”。这种数据存储可用于存储状态,这种电路在电子学中被描述为时序逻辑。在有限状态机中使用时,输出和下一个状态不仅取决于其当前输入,还取决于其当前状态(因此也取决于先前的输入)。它还可用于脉冲计数,以及将可变定时输入信号与某个参考定时信号同步。
触发器可以是电平触发(异步、透明或不透明)或边沿触发(同步或时钟)。触发器一词历来泛指电平触发和边沿触发电路,它们使用门存储单个数据位。最近,一些作者保留术语“触发器”专门用于讨论时钟电路。简单的通常称为透明闩锁。[1] [2]使用这个术语,电平敏感触发器称为透明锁存器,而边沿触发触发器简称为触发器。使用任一术语,术语“触发器”指的是存储单个数据位的设备,但术语“锁存器”也可以指使用单个触发器存储任意数量的数据位的设备。术语“边缘触发”和“电平触发”可用于避免歧义。[3]
当启用电平触发锁存器时,它变得透明,但边沿触发触发器的输出仅在单一类型的时钟边沿(正向或负向)上改变。
触发器发展历史

来自 Eccles 和 Jordan 1918 年专利的触发器原理图,一个被绘制为具有正反馈路径的级联放大器,另一个被绘制为对称交叉耦合对1918 年,英国物理学家s William Eccles 和 F. W. Jordan发明了第一台电子触发器。它最初被称为Eccles-Jordan 触发电路,由两个有源元件(真空管)组成。该设计用于 1943 年的英国Colossus 密码破译计算机 ,即使在引入集成电路之后,这种电路及其晶体管版本在计算机中也很常见。早期的触发器被称为触发电路或多谐振荡器。
根据美国喷气推进实验室( Jet Propulsion Laboratory)的工程师 PL Lindley 的说法,下面详述的触发器类型(SR、D、T、JK)首先在 1954 年由 Montgomery Phister 的加州大学洛杉矶分校计算机设计课程中讨论,然后出现在他的《数字计算机的逻辑设计》一书。Lindley 当时在 Eldred Nelson 手下的 Hughes Aircraft 工作,他创造了术语 JK 来表示当两个输入都打开时会改变状态的触发器(逻辑上的“1”)。其他名字是菲斯特创造的。它们与下面给出的一些定义略有不同。在设计逻辑系统时,Nelson 将以下字母分配给触发器输入:#1:A & B,#2:C & D,#3:E & F,#4:G & H,#5:J & K. Nelson在 1953 年提交的专利申请中使用了符号“ j -input”和“ k -input”。

基于双极结型晶体管的传统(简单)触发器电路触发器可以是简单的(透明的或异步的)或同步的。在硬件描述语言(HDL)的上下文中,简单的语言通常被描述为锁存器,而时钟控制的语言被描述为触发器。
简单的触发器可以围绕一对交叉耦合的反相元件构建:真空管、双极晶体管、场效应晶体管、反相器和反相逻辑门都已用于实际电路。
时钟设备是专门为同步系统设计的;此类设备会忽略其输入,除非在专用时钟信号(称为时钟、脉冲或选通)的转换中。时钟使触发器根据转换时输入信号的值改变或保持其输出信号。一些触发器在时钟的上升沿改变输出,另一些在下降沿改变输出。
由于初级放大级是反相的,因此可以将两个级连续连接(作为级联)以形成所需的同相放大器。在这种配置中,每个放大器可以被视为另一个反相放大器的有源反相反馈网络。因此,尽管电路图通常绘制为对称的交叉耦合对(这两幅图最初都在 Eccles-Jordan 专利中引入),但两个级在同相环路中连接。
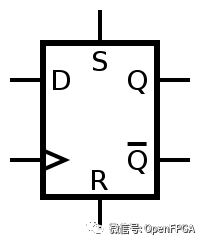
触发器类型
触发器可以分为常见的类型:SR(“set-reset”)、D(“data”或“delay”)、T(“toggle”)和JK。特定类型的行为可以通过所谓的特征方程来描述,该方程导出“next”(即,在下一个时钟脉冲之后)输出。
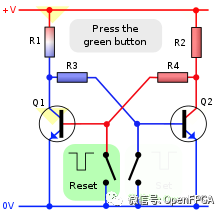
复位锁存器
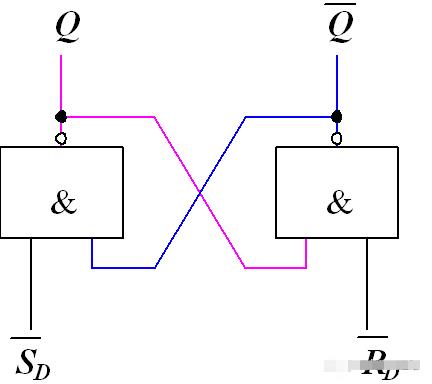
当使用静态门作为构建块时,最基本的锁存器是简单的SR 锁存器,其中 S 和 R 代表 set 和 reset。它可以由一对交叉耦合的NOR或NAND 逻辑门构成。存储的位出现在标记为 Q 的输出上。
基于双极结型晶体管的传统(简单)触发器电路## SR NOR锁存器

SR 锁存器的动画,由一对交叉耦合的NOR 门构成。红色和黑色分别表示逻辑“1”和“0”。当 R 和 S 输入均为低电平时,反馈将 Q 和 ~Q 输出保持在恒定状态, ~Q 是Q的补码。如果 S ( Set ) 脉冲高电平而 R ( Reset ) 保持低电平,则 Q 输出强制为高,当 S 回到低时保持高;同样,如果在 S 保持低电平时 R 脉冲为高电平,则 Q 输出被强制为低电平,并在 R 恢复为低电平时保持低电平。
SR 锁存操作真值表
注意:X 表示don't care ,即 0 或 1 都是有效值。
R = S = 1 组合称为受限组合或禁止状态,因为两个 NOR 门随后输出零,它打破了逻辑方程 Q = not (~Q)。这种组合在两个输入可能同时变低的电路中也不合适(即从受限转换到保持)。根据门之间的传播时间关系(竞争条件),输出将锁定在 1 或 0。
SR NOR锁存器的工作原理。

SR 锁存器动画。黑色和白色分别表示逻辑“1”和“0”。
- S = 1,R = 0:设置
- S = 0,R = 0:保持
- S = 0,R = 1:复位
- S = 1,R = 1:不允许
从受限组合 (D) 到 (A) 的转变会导致不稳定状态。
为了克服受限组合,可以将门添加到将转换(S, R) = (1, 1)为非受限组合之一的输入。那可以是:
Q = 1 (1, 0) – 称为S(主控)锁存器 Q = 0 (0, 1) – 称为R(主控)锁存器
这几乎在每个可编程逻辑控制器中都完成了。
保持状态 (0, 0) – 称为E-latch
或者,可以进行受限组合以切换输出。结果是JK 锁存器。

SR NOR锁存器的工作原理### SR NOR锁存器的特征方程为:

另一个表达式是:

SR NAND 锁存器

由交叉耦合的NAND 门构成的SR锁存器。下面显示的电路是一个基本的 NAND 锁存器。输入通常指定为 S 和 R,分别表示 set 和 reset。由于 NAND 输入通常必须为逻辑 1 以避免影响锁存动作,因此在该电路中输入被认为是反相的(或低电平有效)。
即使在控制输入信号发生变化后,电路也使用反馈来“记住”并保持其逻辑状态。当 S 和 R 输入都为高电平时,反馈将 Q 输出保持在之前的状态。
SR锁存器真值表

SR NAND 锁存器的符号## SR AND-OR 锁存器

一个 SR AND-OR 锁存器。浅绿色表示逻辑“1”,深绿色表示逻辑“0”。锁存器当前处于保持模式(无变化)。从教学的角度来看,将 SR 锁存器绘制为一对交叉耦合组件(晶体管、门、管等)对于初学者来说通常很难理解。一种教学上更容易理解的方法是将锁存器绘制为单个反馈回路,而不是交叉耦合。下面是一个 SR 锁存器,它带有一个带有一个反相输入的AND门和一个OR门。请注意,锁存功能不需要反相器,而是使两个输入都处于高电平有效状态。
SR AND-OR 锁存器真值表
请注意,SR AND-OR 锁存器具有明确定义 S = 1、R = 1 的优点。在上述版本的 SR AND-OR 锁存器中,它优先于 R 信号而不是 S 信号。如果需要 S 优先于 R,这可以通过将输出 Q 连接到 OR 门的输出而不是 AND 门的输出来实现。
SR AND-OR 锁存器更容易理解,因为两个门都可以单独解释。当 S 或 R 均未设置时,或门和与门都处于“保持模式”,即它们的输出是来自反馈回路的输入。当输入 S = 1 时,或门的输出变为 1,而与来自反馈回路的其他输入无关(“set模式”)。当输入 R = 1 时,与门的输出变为 0,而与来自反馈回路的其他输入无关(“reset模式”)。由于输出 Q 直接连接到 AND 门的输出,因此 R 优先于 S。绘制为交叉耦合门的锁存器可能看起来不太直观,因为一个门的行为似乎与另一个门交织在一起。
请注意,SR AND-OR 锁存器可以使用逻辑转换转换为 SR NOR 锁存器:将 OR 门的输出和 AND 门的第二个输入反相,并在这两个添加的反相器之间连接反相 Q 输出;根据德摩根定律,两个输入反转的与门等效于或非门。
JK 锁存器
JK 锁存器的使用频率远低于 JK 触发器。JK 锁存器遵循以下状态表:
JK锁存器真值表
因此,JK 锁存器是一个 SR 锁存器,当通过 11 的输入组合时,它会触发其输出(在 0 和 1 之间振荡)。与 JK 触发器不同,JK 锁存器的 11 输入组合是不是很有用,因为没有指示切换的时钟。
门控锁存器(闩锁)和条件透明
闩锁设计为透明的。也就是说,输入信号的变化会导致输出的立即变化。当另一个输入(“enable”输入)未被断言时,可以将附加逻辑添加到简单的门控锁存器以使其不透明或不透明。当多个门控锁存器彼此跟随时,使用相同的使能信号,信号可以一次通过所有这些锁存器传播。然而,通过一个透明高锁存器和一个透明低(或不透明高)锁存器,实现了主从触发器。
门控 SR 锁存器

与非门控 SR 锁存器(时钟 SR 触发器)。注意反相输入。
由AND门(左侧)和NOR门(右侧)构成的门控 SR 锁存器电路图。可以通过将第二级 NAND 门添加到反相SR 锁存器(或将第二级与门添加到直接SR 锁存器)来制作同步 SR 锁存器(有时是时钟 SR 触发器)。额外的 NAND 门进一步反转输入,因此SR锁存器变为门控 SR 锁存器(并且 SR 锁存器将转换为具有反转使 能的门控SR锁存器)。
当 E 高( enable 真)时,信号可以通过输入门到达封装锁存器;除了 (0, 0) = hold之外的所有信号组合,然后立即在 (Q, ~Q ) 输出上再现,即锁存器是透明的。
E 低(enable 假)时,锁存器关闭(不透明)并保持上次 E 为高时的状态。
使能输入有时是时钟信号,但更常见的是读或写选通信号。当使能输入是时钟信号时,锁存器被称为对电平敏感(对时钟信号的电平),而不是像下面的触发器那样 对边沿敏感。
门控 SR 锁存器真值表

门控 SR 锁存器的符号## 门控 D 锁存器
该锁存器利用了以下事实:在门控 SR 锁存器的两个有效输入组合(01 和 10)中,R 是 S 的补码。输入 NAND 级将两个 D 输入状态(0 和 1)转换为这两个输入通过反转数据输入信号来组合下一个SR锁存器。使能信号的低状态产生无效的“11”组合。因此,门控 D 锁存器可被视为单输入同步 SR 锁存器。此配置可防止应用受限输入组合。它也被称为透明锁存器、数据锁存器或简单的门控锁存器。它有一个数据输入和一个启用信号(有时称为时钟或控制)。透明这个词来自这样一个事实,即当使能输入打开时,信号直接通过电路传播,从输入 D 到输出 Q。门控 D 锁存器也对时钟电平敏感或使能信号。
D存器通常用作 I/O 端口或在异步系统中,或在同步两相系统(使用两相时钟的同步系统)中,其中两个在不同时钟相位上运行的锁存器会阻止数据透明性,就像在主机中一样——从触发器。
锁存器可用作集成电路,通常每个芯片具有多个锁存器。例如,74HC75是7400 系列中的四通D锁存器。
下面的真值表显示,当enable / c lock输入为0时,D输入对输出没有影响。当 E/C 为高时,输出等于 D。
门控 D 锁存器真值表

门控 D 锁存器的符号
基于SR NAND 锁存器 的门控 D 锁存器
基于 SR NOR 锁存器的门控 D 锁存器
动画门控 D 锁存器。黑色和白色分别表示逻辑“1”和“0”。
- D = 1,E = 1:设置
- D = 1,E = 0:保持
- D = 0,E = 0:保持
- D = 0,E = 1:复位

传输晶体管逻辑中的门控 D 锁存器,类似于 CD4042 或 CD74HC75 集成电路中的锁存器。## 厄尔锁存器(厄尔闩锁)Earle latch
经典的门锁设计有一些不受欢迎的特性。它们需要双轨逻辑或逆变器。输入到输出的传播可能需要多达三个门延迟。输入到输出的传播不是恒定的——一些输出需要两个门延迟,而另一些需要三个。
一个成功的替代品是厄尔闩锁。它只需要一个数据输入,它的输出需要两个恒定的门延迟。此外,在某些情况下,Earle 锁存器的两个门级可以与驱动锁存器的电路的最后两个门级合并,因为许多常见的计算电路都有一个 OR 层,然后是 AND 层作为它们的最后两个级别. 合并锁存功能可以实现没有额外门延迟的锁存。这种合并通常用于流水线计算机的设计,事实上,它最初是由 John G. Earle 开发的。
厄尔闩锁没有危险。如果省略中间的与非门,则得到极性保持锁存器,这是常用的,因为它需要较少的逻辑。但是,它容易受到逻辑风险的影响。有意偏斜时钟信号可以避免这种危险。

Earle 锁存器使用互补使能输入:使能低电平有效 (E_L) 和使能高电平有效 (E_H)
厄尔闩锁动画。黑色和白色分别表示逻辑“1”和“0”。
- D = 1,E_H = 1:设置
- D = 0,E_H = 1:复位
- D = 1,E_H = 0:保持
-
存储
+关注
关注
13文章
4314浏览量
85853 -
脉冲
+关注
关注
20文章
889浏览量
95640 -
锁存器
+关注
关注
8文章
906浏览量
41510 -
触发器
+关注
关注
14文章
2000浏览量
61159
发布评论请先 登录
相关推荐
恒压变压器的发展史
蓝牙耳机发展史
5G的发展史
unix系统发展史


触发器发展史及类型(下)
触发器的类型介绍
触发器的触发顺序是什么






 工商网监
工商网监
评论