 德州仪器运动相机和手持云台解决方案
德州仪器运动相机和手持云台解决方案
伴随互联网的迅猛发展与5G时代的到来,短视频成为了行业最火热的风口。智能手机加速更新换代的同时,运动相机与手持稳定器由于应用场景的多元化,以及性能和价格的优势,逐渐受到年轻人的喜爱。
1. 运动相机系统介绍
相比于传统的数码相机,运动相机采用电子防抖的方式,在实际拍摄时只有部分的画面,通过内置陀螺仪和加速度计对摄像机抖动方向进行模糊判断,利用处理器的资源进行计算、并对剩下的画面进行补充,从而产生防抖的效果。随着处理器的不断发展,电子防抖由于其成本的优势,成为了运动相机的主流防抖方式。
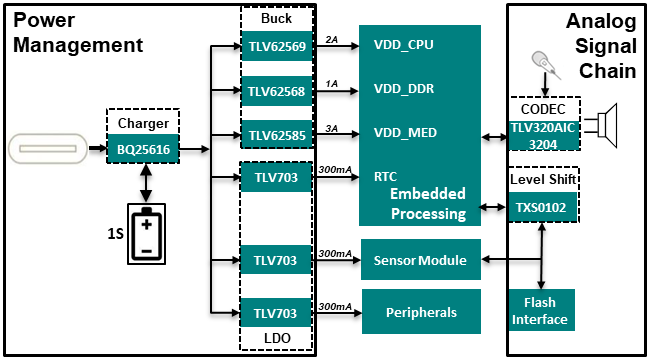
详细的运动相机系统框图如下:
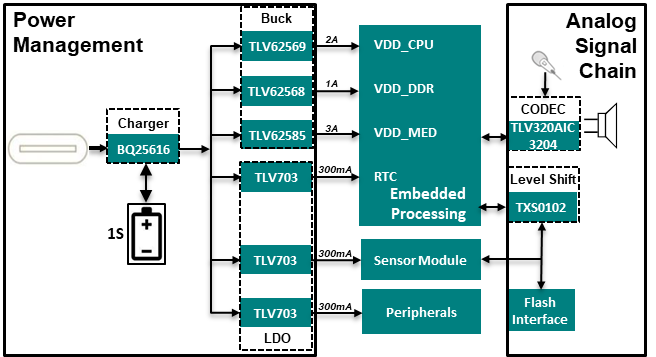
信号链部分,麦克风和镜头模组采集音视频信号,通过相应的编解码器后送入MCU进行处理,采用用户自定义的防抖的算法,最终将清晰的视频还原出来。
音频编解码器设备的主要组件是模数转换器(ADC),数模转换器(DAC)和数据接口总线,用于在编解码器和微控制器( MCU)或DSP。随着便携式应用程序中系统复杂度的增加和尺寸的减小,功能集成成为设计人员的一种有吸引力的选择。用户可以使用I2C™或SPI™通信协议进行访问配置音频编解码器的相关寄存器。该器件可以在嘈杂的环境中从低电平远场信号中提取清晰的语音/多麦克风阵列。可能还需要一些逻辑器件如电平转换器件来匹配Flash或者外设接口与处理器之间的电平不兼容的问题。
电源轨部分,通常是5V的USB接口,经过充电芯片为系统供电/锂电池进行充电。当没有外接外部供电时,电池会经过高效率的DC-DC芯片为系统提供电能。为了保证画质的稳定以及MCU的性能,通常采用具有低噪声的LDO对镜头模组以及MCU的时钟供电。
动相机系统中。电池的节数大都是在1节。随着人们对于高品质视频的追求,在画质以及帧数提升的同时,处理器的功耗也会随之不断增加。TI的充电芯片还可以提电源路径管理的功能,可以灵活的配置充电过程中电源输入、电池与系统负载之间的关系,还可以通过JEFET根据实际温度调节合适的充电电流。高效率的供电方案可以减小系统的体积并且延长使用时长,也降低了开发者的设计难度。
运动相机对芯片的封装和功耗有严格的要求。TI的产品非常的丰富,这里简单推荐几款IC,关心的指标主要是功耗和封装。
运动相机方案汇总
| Part number | 功能 | 功耗 | 封装 | 特点 |
| BQ25616 | 充电芯片 | 9.5-µA待机功耗 | 4.00mm × 4.00mm | OTG, NVDC, JEITA,1节电池3A高效充电芯片 |
| TLV62568 | 降压芯片 | 35µA,关断2uA | 1.60mm × 1.60mm | SOT-23,1A 高效降压芯片 |
| TLV62569 | 降压芯片 | 35µA,关断2uA | 1.60mm × 1.60mm | SOT-23, 2A 高效降压芯片 |
| TLV62585 | 降压芯片 | 35µA,关断2uA | 1.60mm × 1.60mm | QFN/ SOT-23, 3A 高效降压芯片 |
| TLV703 | LDO | 35μA | 2.90mm × 1.60mm | 300mA 低 Iq 低压降 LDO |
| TLV320AIC3204 | 音频编解码器 | - | 5.00mm × 5.00mm | Power TuneTM ,超低功耗立体声音频编解码器 |
| TXS0102 | 电平转换器 | - | 1.40mm × 1.00mm | 2位双向电平转换器 |
2. 手持稳定器系统介绍
手持稳定器又称手持云台,是无人机云台的衍生品,将无人机上运用的自动稳定协调系统的技术运用转移到手机(或相机)拍摄上,是一种高科技的便携式移动摄影器材。相对于传统的斯坦尼康式机械稳定器,手持云台这种电子稳定器极大的简化了拍摄者的拍摄难度。该装置内置的陀螺仪传感器检测到三轴抖动的位置和方向后,通过MCU处理这些数据并且驱动俯仰轴,横滚轴以及航向轴的三个电机,通过转动来产生与我们手部抖动相反的作用力,从而抵消画面的震动,实现拍摄视频的稳定性。
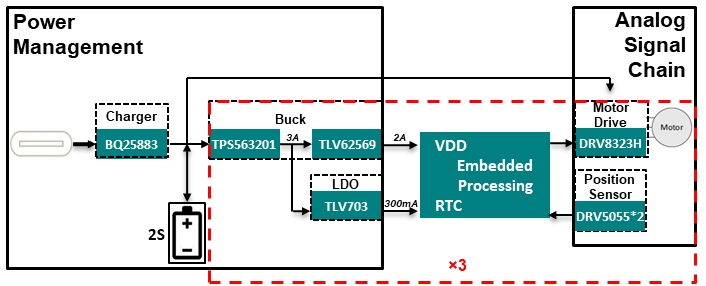
详细的手持稳定器系统框图如下:
手持稳定器方面对芯片的封装和功耗也有严格的要求。如下是TI在手持稳定器方面解决方案汇总。
手持稳定器方案汇总
| Part number | 功能 | 功耗 | 封装 | 特点 |
| BQ25883 | 充电芯片 | 30uA | 4.00mm x 4.00mm | I2C 控制,2 节电池 2A 升压充电器 |
| TPS563201 | 降压芯片 | 关断1uA | 1.60mm x 2.90mm | 4.5V 至 17V 输入、3A 输出、同步 SWIFT 降压转换器 |
| TLV62569 | 降压芯片 | 35µ,关断2uA | 1.60mm x 1.60mm | SOT-23, 2A 高效降压芯片 |
| TLV703 | LDO | 35 μA | 2.90mm × 1.60mm | 300mA 低 Iq 低压降 LDO |
| DRV8323 | 三相马达驱动 | - | 6.00mm × 6.00mm | 具有三个分流放大器的 60V 三相智能栅极驱动器 |
| DRV5055 | 线性霍尔传感器 | - | 2.92mm × 1.30mm | 高精度 3.3V 或 5V 比例式双极霍尔效应传感器系列 |
电源轨部分,一般通过USB接口,采用充电芯片为系统供电/锂电池进行充电。考虑到云台无刷电机驱动的效率,通常会采用多节锂电池为电机驱动供电,较高的母线电压还可以降低主回路中的电流,减少不必要的线损。此外,为了保证系统的性能和待机时长,还需要采用高效的降压芯片为处理器进行供电,以及低噪声的LDO为处理器的时钟提供基准。
信号链部分:通过两个线性霍尔传感器检测无刷直流电机位置的偏移,处理器将检测到三轴抖动的位置和方向的偏移量,执行相应的算法。通过驱动芯片来驱动无刷电机补偿该偏移量,最终实现视频的稳定拍摄。
审核编辑:郭婷
-
处理器
+关注
关注
68文章
19485浏览量
231524 -
陀螺仪
+关注
关注
44文章
795浏览量
99070 -
互联网
+关注
关注
54文章
11196浏览量
104118 -
加速度计
+关注
关注
6文章
707浏览量
46126
发布评论请先 登录
相关推荐
运动相机和手持云台解决方案
德州仪器(TI)的车用视觉控制解决方案
混合和电动汽车解决方案指南-德州仪器

Mouser供货德州仪器的温度传感解决方案

浅析德州仪器运动相机和手持云台解决方案






 工商网监
工商网监
评论