 焊接机器人系统构成及焊接时的注意事项
焊接机器人系统构成及焊接时的注意事项
焊接机器人最早只在点焊中得到应用,80年初,随着计算机技术、传感器技术的发展,弧焊机器人逐渐得到普及,特别是近十几年来由于世界范围内经济的高速发展,市场的激烈竞争使那些用于中、大批量生产的焊接自动化专机已不能适应小规模、多品种的生产模式逐渐被具有柔性的焊接机器人代替,焊接机器人得到了巨大的发展,焊接已成为工业机器人应用最大的领域之一,焊接机器人在汽车、摩托车、工程机械等领域都得到了广泛的应用。目前世界拥有的80余万台工业机器人中,用于焊接的机器人可达40%以上。
机器人焊接时的主要注意事项
1.必须进行示教作业
在机器人进行自动焊接前,操作人员必须示教机器人焊枪的轨迹和设定焊接条件等。
由于必须示教,所以机器人不面向多品种少量生产的产品焊接。
2.必须确保工件的精度
机器人没有眼睛,只能重复相同的动作。
机器人轨迹精度为±0.1mm,以此精度重复相同的动作。
焊接偏差大于焊丝半径时,有可能焊接不好,所以工件精度应保持在焊丝半径之内。
3.焊接条件的设定取决于示教作业人员的技术水平
操作人员进行示教时必须输入焊接程序,焊枪姿态和角度,电流、电压、速度等焊接条件。
示教操作人员必须充分掌握焊接知识和焊接技巧。
4.必须充分注意安全
机器人是一种高速的运动设备,在其进行自动运行时绝对不允许人靠近机器人(必须设置安全护栏)。
操作人员必须接受劳动安全方面的专门教育,否则不准操作。
弧焊机器人的性能要求
在弧焊作业中,要求焊枪跟踪工件焊道运动,并不断填充金属形成焊缝,因此运动过程中速度的稳定性和轨道精度是两项重要的指标。
一般情况下,焊接速度可取5~50mm/s,轨道精度可取±0·2~0·5mm。由于焊枪的姿态对焊缝质量也有一定的影响,因此希望在根踪焊道的同时,焊枪姿态的可调范围尽量大,还有其它一些性能要求,如摆动功能、焊接传感器(起始点检测、焊缝跟踪)的接口功能、焊枪防碰功能等。
焊接规范的设定。起弧、收弧参数。
摆动功能。摆动频率、摆幅、摆动类型的设定。
焊接传感器。起始点检测、焊缝跟踪传感器的接口功能。
焊枪防碰功能。当焊枪受到不正常的阻力时,机器人停机,避免操作者和工具受到损坏。
多层焊功能。应用该功能可以在第一层焊接示教完成后,实现其余各层的自动编程。
再引弧功能。引弧失败后,自动重试。因此消除了焊接异常(引弧失败)发生时引起的作业中断,最大限度避免了因此而引起的全线停车。
焊枪校正功能。焊枪与工件发生碰撞时,可通过简单操作进行校正。
粘丝自动解除功能。焊接终了时如果检测出焊丝粘丝,则自动再通电解除粘丝,因此不必手工剪断焊丝。
断弧再启动功能。出现断弧时,机器人会按照指定的搭接量返回重新引弧焊接。因此无须补焊作业。
点焊机器人的性能要求
对于点焊机器人运动速度是一个重要指标,要求能够快速完成小节距的多点定位(例如每0.3-0.4秒移动30-50mm节距后定位);为确保焊接质量,定位精度要求较高(一般为±0·25mm);并具有较大的持重(50~100Kg),以便携带内装变压器的焊钳。
焊接机器人的主要性能指标
名称与型号:Motoman-L10
主要用途:弧焊
类别:示教再现型
坐标型式:多关节式
自由度数:5个
抓重:最大10㎏(包括夹钳)
动作范围与速度运动参数列表如下:
Motoman-L10运动参数
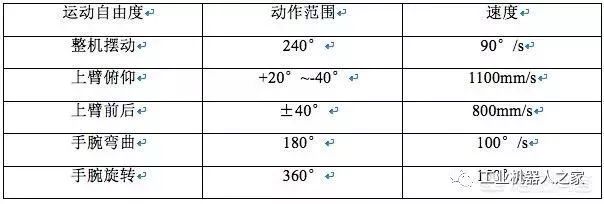
(遮住的数字是150)
定位方式:选用增量编码器作为位置检测元件
控制方式:重复式数字位置控制方式,可精确控制运动轨迹
重复定位精度:±0.2mm
驱动方式:电伺服采用交流测速发电机作为伺服电动机的速度检测元件,实现速度反馈,并引进力矩反馈
驱动源:DC伺服电动机
程序控制和存储方式:采用8位微处理Intel8080用半导体存储器作为主存(盒式磁带补充主存容量之不足)
程序步数:1000步
指令条数:600条
重量:本体400㎏控制部分350㎏
外部同步信号:输入22点输出21点
电源:AC220/220V(+10%,-15%),50/60HZ±1HZ,三相5KVA
焊接机器人的系统构成
完整的焊接机器人系统一般有如下几部分组成:机器人操作机、变位机、控制器、焊接系统(专用焊接电源、焊枪和焊钳等)、焊接传感器、中央控制计算机和相应的安全设备等。
根据用途,将工业机器人配置不同的焊接系统,将组成不同的焊接机器人系统。
弧焊机器人
弧焊机器人在通用机械、金属结构等许多行业中得到广泛运用。弧焊机器人是包括电弧焊附属装置在内的柔性焊接系统,而性能有特殊的要求。在弧焊作业中,焊枪应跟踪工件的焊道运动,并不断填充金属形成焊缝。因此运动过程中的速度稳定性和轨迹精度是两项重要指标。一般情况下,焊接速度约为5~50㎜/s,轨迹精度约为±(0.2~0.5)㎜。由于焊枪的姿态对焊缝质量有一定的影响,因此希望在跟踪焊道的同时,焊枪姿态的可调范围尽量大,其一些基本性能要求如下所示:
设定焊接条件(电流、电压、速度等);
摆动功能;
坡口填充功能;
焊接异常功能检测;
焊接传感器(起始点检测、焊道跟踪)的接口功能。
点焊机器人
汽车工业是点焊机器人系统一个典型的应用领域。最初,点焊机器人只用于增强焊作业(往已拼接好的工件上增加焊点),后来为了保证拼接精度,又让机器人完成定位焊作业性能,具体来说有:
安装面积小,工作空间大;
快速完成小节距的多点定位(例如每0.3~0.4s移动30~50㎜节距后定位);
定位精度高(±0.25㎜),以确保焊接质量;
持重大(50~100㎏),以便携带内装变压器的焊钳;
内存容量大,示教简单,节省工时;
点焊速度已生产线相匹配,同时按全可靠性好。

焊接机器人系统原理图
焊接机器人的示教编程
用机器人代替人进行作业时,必须预先对机器人发出指令,规定机器人应该完成的动作和作业的具体内容,这个指示过程称之为对机器人的示教(teaching),或者称之为对机器人的编程(programming)。对机器人的示教内容通常存储在机器人的控制装置内,通过存储内容的再现(playback),机器人就能实现人们所要求的动作和要求人们赋予的作业内容。
示教内容主要由两部分组成,一是机器人运动轨迹的示教,二是机器人作业条件的示教。机器人运动轨迹的示教主要是对为了完成某一作业,焊丝端部所要运动的轨迹,包括运动类型和运动速度的示教。机器人作业条件的示教主要是为了获得好的焊接质量,对焊接条件进行示教,包括被焊金属的材质、板厚、对应焊缝形状的焊枪姿势、焊接参数、焊接电源的控制方法等。
-
传感器技术
+关注
关注
51文章
345浏览量
97968 -
计算机技术
+关注
关注
1文章
104浏览量
13254 -
焊接机器人
+关注
关注
16文章
320浏览量
14945
发布评论请先 登录
相关推荐
工业焊接机器人实训平台介绍
焊接机器人及其应用
焊接机器人及系统介绍(焊接机器人系统组成和编程方法及发展趋势)
焊接机器人的焊接参数有什么影响
铜线焊接机使用注意事项
焊接机器人的分类介绍
焊接机器人的操作流程和操作注意事项是什么?






 工商网监
工商网监
评论