 焊接机器人主要工作原理
焊接机器人主要工作原理
现在广泛应用的焊接机器人都属于第一代工业机器人,它的基本工作原理是示教再现。示教也称导引,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数\工艺参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作。这就是示教与再现。
实现上述功能的主要工作原理,简述如下:
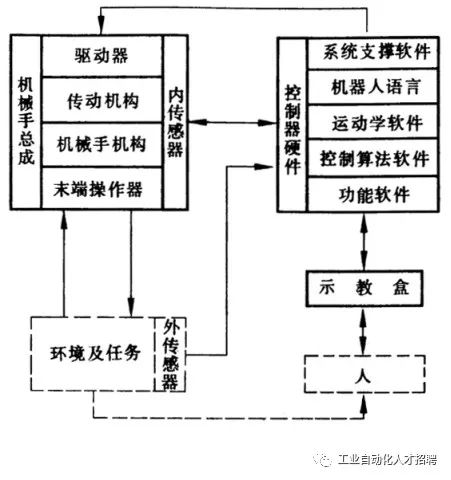
图 1 工业机器人的基本结构
机械手总成是机器人的执行机构,它由驱动器、传动机构、机器人臂、关节、末端操作器、以及内部传感器等组成。它的任务是精确地保证末端操作器所要求的位置,姿态和实现其运动。
控制器是机器人的神经中枢。它由计算机硬件、软件和一些专用电路构成,其软件包括控制器系统软件、机器人专用语言、机器人运动学、动力学软件、机器人控制软件、机器人自诊断、白保护功能软件等,它处理机器人工作过程中的全部信息和控制其全部动作。
示教系统是机器人与人的交互接口,在示教过程中它将控制机器人的全部动作,并将其全部信息送入控制器的存储器中,它实质上是一个专用的智能终端。
(2) 机器人手臂运动学 机器人的机械臂是由数个刚性杆体由旋转或移动的关节串连而成,是一个开环关节链,开链的一端固接在基座上,另一端是自由的,安装着末端操作器 ( 如焊枪 ) ,在机器人操作时,机器人手臂前端的末端操作器必须与被加工工件处于相适应的位置和姿态,而这些位置和姿态是由若干个臂关节的运动所合成的。因此,机器人运动控制中,必须要知道机械臂各关节变量空间和末端操作器的位置和姿态之间的关系,这就是机器人运动学模型。一台机器人机械臂几何结构确定后,其运动学模型即可确定,这是机器人运动控制的基础。
**机器人手臂运动学中有两个基本问题。 **
- 对给定机械臂,己知各关节角矢量 g(f)=[gl(t) ,g2(t) ,...... gn(i)] ',其中 n 为自由度。求末端操作器相对于参考坐标系的位置和姿态,称之为运动学正问题。在机器人示教过程中。机器人控制器即逐点进行运动学正问题运算。
- 对给定机械臂,已知末端操作器在参考坐标系中的期望位置和姿态,求各关节矢量,称之为运动学逆问题。在机器人再现过程中,机器人控制器即逐点进行运动学逆问题运算,将角矢量分解到机械臂各关节。
运动学正问题的运算都采用 D-H 法,这种方法采用 4X4 齐次变换矩阵来描述两个相邻刚体杆件的空间关系,把正问题简化为寻求等价的 4X4 齐次变换矩阵。逆问题的运算可用几种方法求解,最常用的是矩阵代数、迭代或几何方法 ob 在此不作具体介绍,可参考文献 [1]。对于高速、高精度机器人,还必须建立动力学模型, 由于目前通用的工业机器人 ( 包括焊接机器人 ) 最大的运动速度都在 3m / s 内,精度都不高于 O.1mm ,所以都只做简单的动力学控制,动力学的计算方法可参考文献正 [1 ~ 3] 。
(3) 机器人轨迹规划 机器人机械手端部从起点 ( 包括,位置和姿态 ) 到终点的运动轨迹空间曲线叫路径,轨迹规划的任务是用一种函数来“内插”或“逼近”给定的路径,并沿时间轴产生一系列“控制设定点”,用于控制机械手运动。
目前常用的轨迹规划方法有关节变量空间关节插值法和笛卡尔空间规划两种方法。具体算法可参考文献 [1 ,4] 。
(4) 机器人机械手的控制 当一台机器人机械手的动态运动方程已给定。它的控制目的就是按预定性能要求保持机械手的动态响应。但是由于机器人机械手的惯性力、耦合反应力和重力负载都随运动空间的变化而变化,因此要对它进行高精度乙斗高速、高动态晶质的控制是相当复杂而困难的,现在正在为此研究和发展许多新的控制方法。
目前工业机器人上采用的控制方法是把机械手上每一个关节都当作一个单独的伺服机构,即把一个非线性的、关节间耦合的变负载系统,简化为线性的非耦合单独系统。每个关节都有两个伺服环,机械手伺服控制系统见图 2 外环提供位置误差信号,内环由模拟器件和补尝器 ( 具有衰减速度的微分反馈 ) 组成,两个伺服环的增益是固定不变的。因此基本上是一种比例积分微分控制方法 (PID 法 ) 。这种控制方法,只适用于目前速度、精度要求不高和负荷不大的机器人控制,对常规焊接机器人来说,已能满足要求 。

图 2 机械手伺服控制体系结构
(5) 机器人编程语言 机器人编程语言是机器人和用户的软件接口,编程语言的功能决定了机器人的适应性和给用户的方便性,至今还没有完全公认的机器人编程语言,每个机器人制造厂都有自己的语言。
实际上,机器人编程与传统的计算机编程不同,机器人操作的对象是各类三维物体,运动在一个复杂的空间环境,还要监视和处理传感器信息。因此其编程语言主要有两类:面向机器人的编程语言和面向任务的编程语言。
面向机器人的编程语言的主要特点是描述机器人的动作序列,每一条语句大约相当于机器人的一个动作,整个程序控制机器入完种:
- 专用的机器人语言,如 PUMA 机器人的 VAL 语言,是专用的机器人控制语言,它的最新版本是 VAL-I 和 V+ ·······。
- 在现有计算机语言的基础上加机器人子程序库。如美国机器人公司开发的 AR — Basic 和 Intelledex 公司的 Robot — Basic 语言,都是建立在 BASIC 语言上的。
- 开发一种新的通用语言加上机器人子程序库。如 IBM 公司开发的 AML 机器人语言。
面向任务的机器人编程语言允许用户发出直接命令,以控制机器人去完成一个具体的任务,而不需要说明机器人需要采取的每一个动作的细节。如美国的 RCCL 机器人编程语言,就是用 C 语言和一组 C 函数来控制机器人运动的任务级机器人语言。
焊接机器人的编程语言,目前都属于面向机器人的语言,面向任务的机器人语言尚属开发阶段。大都是针对装配作业的需要。
-
控制器
+关注
关注
112文章
16361浏览量
178031 -
机器人
+关注
关注
211文章
28418浏览量
207085 -
工业机器人
+关注
关注
91文章
3363浏览量
92649 -
焊接机器人
+关注
关注
16文章
320浏览量
14947
发布评论请先 登录
相关推荐
焊接机器人的结构组成是什么?
焊接传感器一款转为焊接机器人而设计的焊缝跟踪传感器
工业焊接机器人实训平台介绍
焊接机器人及其应用
焊接机器人主要有哪些种类?
焊接机器人编程方法及流程技巧
详细介绍焊接机器人的工作原理是什么?

焊接机器人编程方法及流程技巧
焊接机器人的工作原理与优势分析






 工商网监
工商网监
评论