 车载镜头光学仿真核心问题解析
车载镜头光学仿真核心问题解析
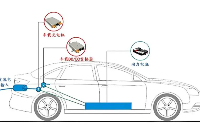
随着移动互联网、物联网、人工智能等与现代光学制造技术、信息、通信、半导体技术的高度融合,汽车智能网联化也获得了高速发展。通过加载先进的车载镜、传感器、控制器、执行器,实现了环境感知、停车位检测、目标识别、泊车路径规划、紧急制动、刹车辅助等全新智能化功能,带来用户更好的驾驶体验。
雷达、摄像头等传感器是ADAS的核心部件之一,前者是通过深度图和点云的方式来实现对目标物体的探测和识别,后者则是以图像视觉的方式来对目标进行捕捉,两者的有效结合能极大提高对周围环境感知力。早期文章中有介绍Ansys Zemax+Speos的激光雷达的仿真案例,在接下来的文章中,笔者会重点围绕CMS(电子后视镜),运用Zemax和Speos来进行车载镜头的联合仿真中的核心问题点做相关阐述。
核心问题一:CMS透镜设计和优化
CMS电子后视镜分为内镜和外镜,是由摄像头和显示屏组成,用来实现对后方、侧面视野的捕捉和监控。其中摄像头的作用是实现对环境的监测,捕捉到的图像经过信号转化和后处理后可以在显示屏上显示,配合其他前视或者侧视的车载镜头最终可实现环视效果。过大的视场角造成镜片工艺难度加大,最终影响了制造成本,这也是为什么当下较成熟的CMS摄像头通常在90°到130°的原因。基于以上分析如何实现多车道大角度范围监控、识别更远的车牌、提升夜视效果、拥有更高性能的同时降低成本是行业趋势。
综合考虑车载镜头的大视场角的使用场景、镜头系统尺寸、后截距大于焦距的设置等因素,本例中的车载镜头初始结构可以设置为反远摄物镜的系统。
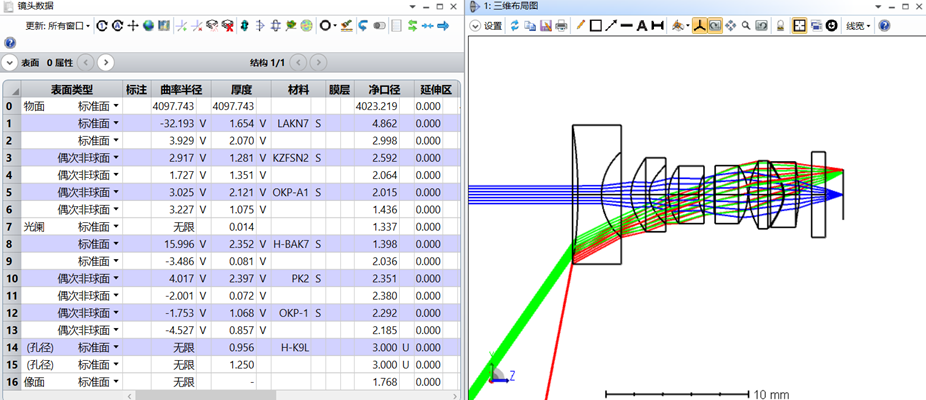
图1 初始结构
该系统前组件为大光焦度负的弯月型透镜作为负透镜,后组件为正光焦度主要存在色差和场曲。因此可以采用双胶合结构,通过提高高冕牌玻璃折射率,降低火石玻璃折射率来实现。最终通过调整前后组件和光阑相对应位置以及透镜曲率半径的非球面系数,得到一个系统参数:F#1.8,焦距1.9mm,FOV为158°,空间频率140lp/mm时全视场大于0.3的光学系统。
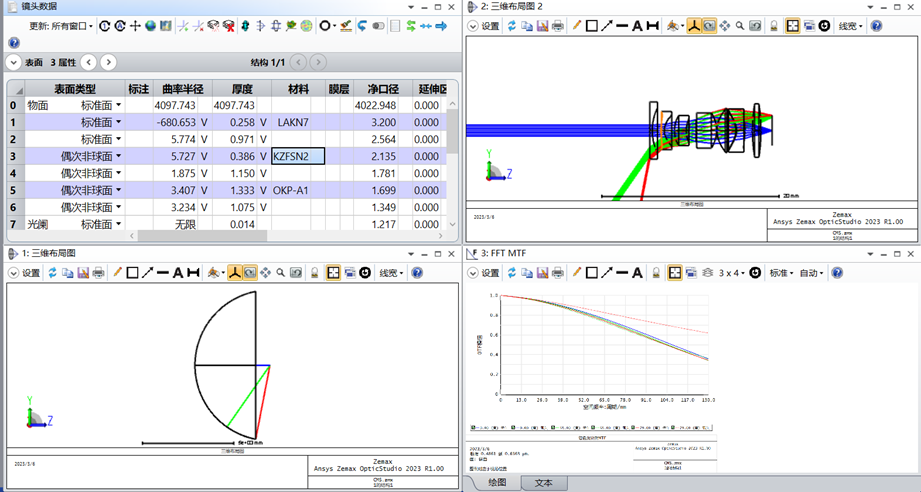
图2 优化后
核心问题二:杂散光分析
光学系统主要分为两类:一种是成像光学系统,另一种是非成像光学系统。针对成像光学系统,任何但经过光学系统传播后到像面的非成像光线都称为杂散光;而对非成像光学系统,任何成像或其它非预期的光线传播形成的光斑等为杂散光。通常杂散光的来源有三种:其一,外部系统引入的光源,比如太阳光、环境反射或者漫反射的光源,外部系统光源进入光学系统后会发生多次的折射、反射以及衍射最终进入到成像像面;其二是系统自身的机械构件会发生热辐射,从而在红外热成像系统中会形成杂散光;其三光线进入光学系统中发生多次折反射,形成多个次光源,最终在像面上汇聚或者发散。
因此,在进行光学产品设计时,如果环境因素、自身热辐射过强,光线在系统中折返次数过多时,一定会降低光线系统的成像质量。如何控制、减弱杂散光的影响是一个重要的光学课题。Ansys Speos中可以通过开启LightExpert模式,Light Expert - Reverse Tracing 逆向追迹分析法、Sequence Detection 序列探测法、Surface Contribution 面贡献率分析法,针对导入的透镜组的实体模型,在仿真结果里可以针对特定区域开启光线追击,来分析穿过特定镜面的光线能量分布和贡献率,以及其对应的序列路径。在完成光路分析后,设计师可以用过增加膜层结构、遮光结构等方法来实现对杂散光的抑制。
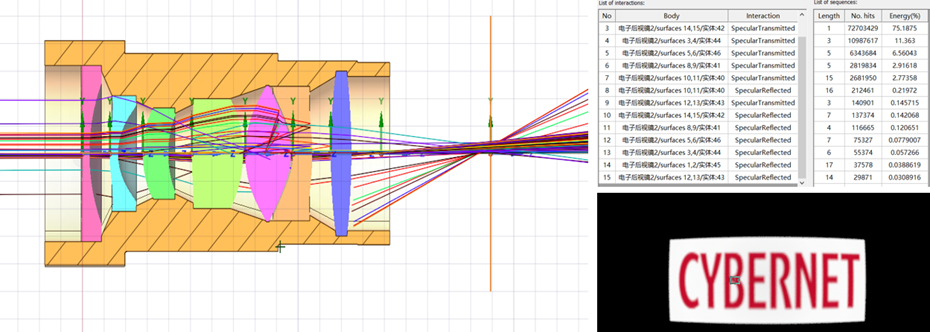
图3 杂散光分析
核心问题三:成像的可视化仿真
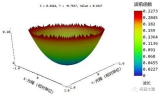
实际应用中,只考虑像差或者杂散光对于分析车载镜头的成像功能来说是不够的。当光线穿过镜头并进入图像传感器,传感器捕捉光照强度并将光信号转换成未处理图像发送给图像信号处理单元,最终输出相应的指定来指导驾驶。以CMS系统的光学仿真为例,对像面所接收的能量分布实施监测,评估远距离的车牌识别能力,传感器分辨力与成像倾斜度仿真,夜视效果以及雾气影响等都是考量范围。
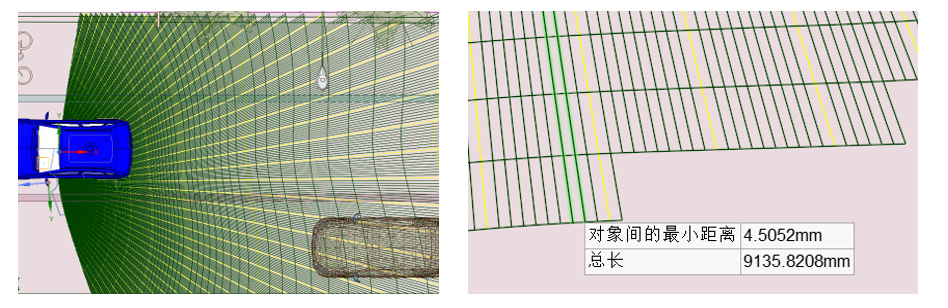
图4 成像FOV分析 (左图)
图5 像素投影与尺寸分析(右图)
因此如何得到车载镜头成像系统的能量分布以及图像信号也是仿真中的关键环节。针对此问题Ansys 平台开发了Zemax与Speos联合方案。通过将Zemax透镜组的系统参数(焦距、像差、景深、畸变等),按照视场角内每个采样光线和探测器上每个像元的位置、能量之间的映射关系转化成相应的DISTORTION文件,在Ansys Speos 的Camera Sensor中加载该文件就可以实现虚拟光学系统的导入。
运用Camera Sensor可以实现以下两个核心功能。其一:如何可视化评估镜头的FOV、纵深可捕捉距离,以及针对目标场景的分辨力的解析;其二:成像系统能量、视觉、环境因素的仿真。其中图8为不同时间(上海10点,12点,16点,18点))太阳入射方位对成像仿真影响,图9为不同能见度(可见度15m,30m,50m)对成像效果影响。
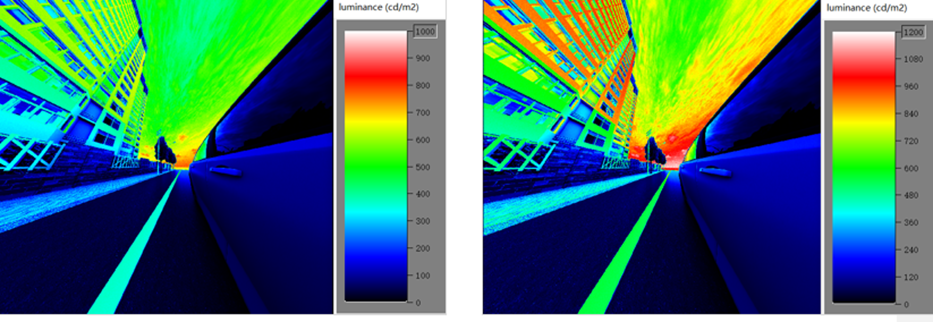
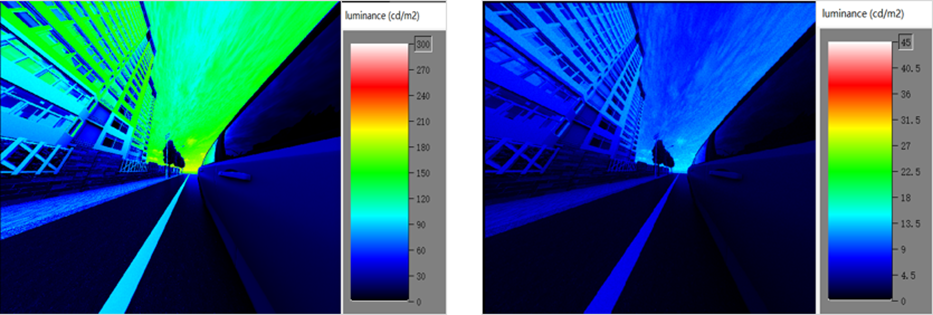
图6 环境光能量分析
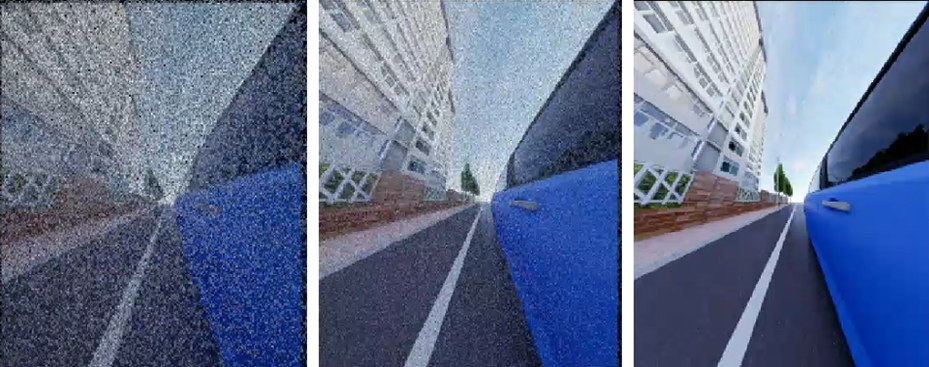
图7 能见度仿真
核心问题四:成像系统的动态仿真
在分析自动驾驶时,多场景的动态仿真也是一个关键点。通过动态仿真可以结合场景等诸多环境因素实时捕获多视角的图像信息,从而可以更加全面验证成像性能以及后期图像算法的精确性。在进学校自动驾驶系统的动态仿真之前需求构建场景。主要包括道路、基础交通设施(交通标线、交通标志、交通信号灯)、天气、光照、其他建筑物基础设施等。
在目前的软件开发版本中Ansys 对目前主流的CAD软件,比如CATIA、UG、犀牛、草图大师等格式的数据是完全支持的,也就是不需要通过转成中间格式数据就能导入,这种格式上的兼容性极大方便了后期种导入其他软件所对应的3D场景。其次如何能生成动态的仿真也是自动驾驶种需要考量的,针对这种需求,可以运用Ansys 二次开发种脚本功能,通过采集不同路径不同时刻下所对应的轨迹数据(包括初始的坐标原点,X/Y坐标值,以及对应的X/Y方向),生成特定的轨迹文件,加载到CAMERASensor即可。
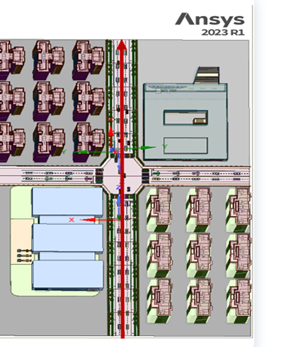
图8 直线轨迹动态仿真
核心问题五:摄像头的多物理仿真
成像质量的好坏不仅仅取决光学像差的控制,更与系统所收到的力或者温度影响,导致镜片曲率发生改变而最终影响成像效果。目前针对多物理场的分析Ansys 平台有两种方案,一种是Ansys Mechanical联合Speos来实现应力变形导致光学成像质量改变的分析,另一种是Mechanical 、Zemax联合Speos的方案。前者主要依赖Workbench来实现同一数据的不同仿真结果在不同平台无损传递来实现,后者则是通过txt文件记录镜片受力变形后数据重新拟合来参与光学仿真分析的思路。
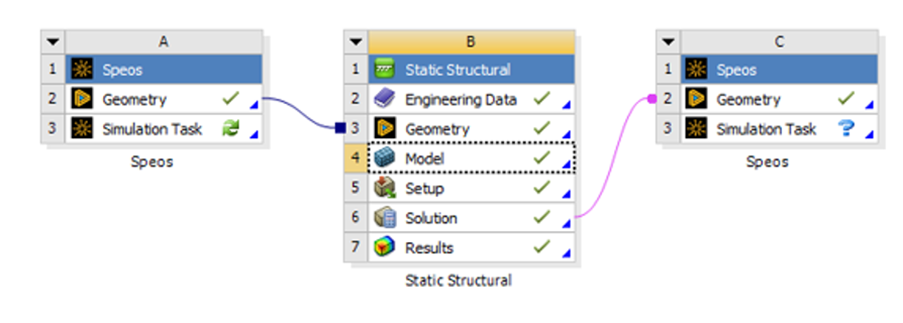
图9 Mechanical与Speos联合仿真工作流
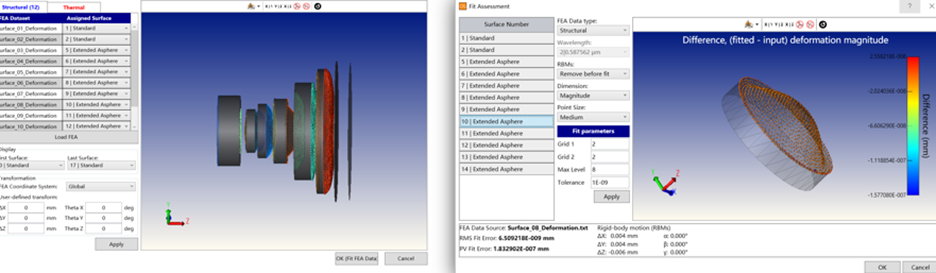
图10Zemax Star拟合镜面
随着国内外自动驾驶的提高,未来对车载镜头的联合仿真的需求会逐渐加大,超高清分辨率、超低照度、日夜共焦、超广角、大光圈、低畸变、小型化、高可靠性、红外夜视、防水防雾、降噪、分析力热变形等等逐步成为技术开发的热点。运用Zemax+Speos (Lumerical,Cmos微观效应,本文未涉及)以及Ansys的光机热产品(Fluent,Mechanical),不论是从设计源头像质、视觉,还是大型场景、环境因素,力热变形等都能提供绝佳方案,高效助力解决设计到自动驾驶中遇到的光学疑难问题。
审核编辑:刘清
-
传感器
+关注
关注
2554文章
51700浏览量
758544 -
控制器
+关注
关注
113文章
16562浏览量
180303 -
光学
+关注
关注
4文章
766浏览量
36590 -
人工智能
+关注
关注
1799文章
48047浏览量
241946 -
adas
+关注
关注
309文章
2205浏览量
209067
原文标题:案例 | 车载镜头光学仿真核心问题解析
文章出处:【微信号:ilinki,微信公众号:智汇工业】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
请问DLP4500拆除光学镜头和光源后的如何工作?
车载总线监控分析及仿真工具 - VBA

弘景光电:以创新驱动发展,引领光学镜头及摄像模组行业新征程
一体化机芯技术解析:镜头、传感器与电路板的完美融合
光学测量镜头怎么选?

远心镜头的几个参数解析

工业镜头光学原理、优势及应用

舜宇光学科技6月手机镜头出货量稳健增长,新兴领域布局加速
一文读懂 | 新能源汽车车载电源深度解析
台湾光学镜头产值年增4.4%,出口摆脱颓势
工业镜头光学系统的成像质量客观评价






 工商网监
工商网监
评论