 七种方法为智能交通系统选择适用的相机
七种方法为智能交通系统选择适用的相机
智能交通系统中(ITS)是将先进的信息技术、通讯技术、传感技术、控制技术以及计算机技术等有效地集成运用于整个交通运输管理体系,而建立起的一种在大范围内、全方位发挥作用的,实时、准确、高效的综合的运输和管理系统。这其中,相机的应用无处不在。作为ITS的“智慧之眼”,相机质量与性能至关重要。
智能交通领域所需的感光芯片通常需要具备全局快门技术及高灵敏度,通常采用大像素,这样即使在曝光时间很短的情况下也能清晰成像,因此符合高速成像的要求。
集成商和 OEM 可以遵循以下指南来为 ITS 找到合适的相机。
智能运输系统 (ITS) 可提高运输的安全性和机动性、提高生产力、促进执法并最终有助于创收。但是,在为 ITS 选择相机时,如果不考虑恶劣环境和特定应用的需求,就会使系统难以成功。此外,众多的选择也让人很难知道应该从何处着手。
相机在 ITS 技术中主要应用于交通监控、自动车牌识别(ALPR;在英国叫做自动号牌识别,简称 ANPR)、访问控制、高承载车辆 (HOV) 的车道监控、停车执法、速度管控执法和资产保护等应用场景。根据不同的应用场景,可能需要不同类型的相机和系统。所有设置都会带来各种难题,例如相机设置需要较长的电缆,必须能够承受恶劣环境,以及为了快速反馈而需要具有边缘处理能力的嵌入式系统等。仔细考虑这些因素可以确保系统成功、降低拥有成本并且其运作可适应未来的需求。本文介绍了一些常见的难题,以及应对这些难题和成功实现 ITS 的方法。
01
图像质量
在为 ITS 应用程序研究相机时,所有计划都必须从图像质量开始。对于 ANPR/ALPR 应用场景,系统有两个主要任务:识别相机的视场中是否有数字/车牌,然后解码车牌。两个任务都可能出错。成功的 ANPR/ALPR 系统需要高质量的图像,以便软件能够执行光学字符识别 (OCR) 和光学字符验证 (OCV) 任务。系统设计者和集成商需要功能强大的相机。
图像传感器质量差的相机无法生成高质量的图像,因此图像传感器一定是关键考虑因素之一。由于室外照明条件的变化,ITS 场景的亮度可能变化很大,而无论光照条件如何,相机都必须能够捕获图像中最亮和最暗的部分并提供其数据和细节。对相机检测高光强度、最大和最小光强度的能力的衡量称为“动态范围”;分贝值 (dB) 越高越好。Sony Pregius 和 Pregius S 系列等高品质图像传感器采用全局快门 CMOS 图像传感器,可提供较高的动态范围灵敏度,是各种 ITS 应用的理想选择。
Teledyne FLIR 的 Blackfly S 系列相机提供一系列基于 Sony Pregius 和 Pregius S 图像传感器的相机型号。这些相机从 160 万像素到 2600 万像素不等,适用于各种不同的 ITS 任务。例如,BFS-PGE-161S7C-C(彩色)和 BFS-PGE-161S7M-C(单色)相机配备 1610 万像素的 Sony IMX542 Pregius S 传感器,动态范围 70.46 dB,饱和能力 9609 e-,在 470 nm(蓝光)下测得的量子效率为 45.76%,525 nm(绿光)下为 52.26%,630 nm(红光)下为 33.49%。在应用场景不需要高分辨率相机的情况下购买这种相机会增加整个项目的成本,但如果考虑到未来的场景,这样做就是合理的。例如,集成商和 OEM 制造商可以考虑未来的运营情况,为道路的扩展提前做好准备,以避免以后更换低分辨率的相机。
02
捕捉颜色
颜色是另一个重要的质量指标。在 ANPR/ALPR 的情况下,黑白图像用来显示车牌,而彩色图像则用来为具体的情况提供背景信息(交通灯、颜色编码的道路交通标志等)。在用车辆上安装的相机来检查是否存在车辆停放不当的情况下,颜色也很重要。例如,在西班牙,街道上的蓝线表示驾驶员必须付费的停车位,而绿线则表示该停车位是留给附近居民的。嵌入式视觉系统可以自动检查是否存在违规行为,但需要高质量的色彩再现才能做到这一点。
图像传感器对光照有特定的响应(量子效应),而每一种光照条件(例如,日光)都有其自身的发射光谱,从而影响图像捕捉时的显示情况。量子效率决定了图像传感器将光子转换为电子的能力,而这种效率会随着波长的不同而变化。色彩收集工具将每个颜色通道与其他通道之间的相互作用考虑在内,并独立设置每个颜色通道的幅值。颜色校正矩阵测量并补偿这些相互作用,以更准确地再现特定对象的真实颜色。这在细微的颜色差异就会对结果的准确性和可靠性产生负面影响的应用场景中尤其重要。
相机和视觉系统有时在处理反射和反射面(如玻璃)的眩光时可能会遇到困难。例如,如果 ITS 在进行 HOV 车道监控时想要观察一辆车的内部情况,而太阳光的反射和眩光可能导致相机无法捕捉车内的图像。Teledyne FLIR 提供两个基于 500 万像素 Sony IMX250MZR 单色偏振传感器的相机(一个 GigE 相机,一个 USB 相机),以及一个基于 500 万像素 Sony IMX250MYR RGB 偏振传感器的相机(USB3 相机)。
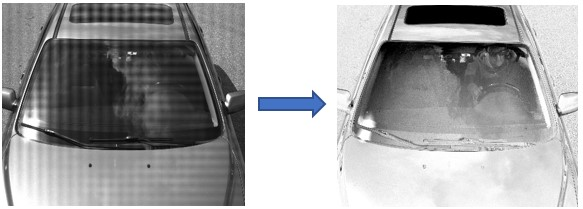
图 2:偏振相机即使在可能存在眩光或反射的困难情况下也能捕捉汽车内部的图像。
03
硬件专家
ITS 行业中的有些集成商和 OEM 可能在软件而非硬件方面拥有更多专业知识。选择、测试和优化硬件是一项挑战,但有经验的相机供应商可以提供项目技术咨询并在相机的选择和设置方面提供帮助。对于并非由供应商提供的附件和服务,包括镜头、线路、外壳和软件开发,还应推荐值得信赖的合作伙伴。
OEM 和集成商还需要在设计和开发阶段提供支持,并在系统设置和软件咨询方面提供帮助。用户应选择那些通过系统工程师和支持团队相结合的方式提供这些服务,并且经常打电话确认的相机公司。在选择硬件提供商之前,最终用户还应就系统支持,以及提供商处理客户关系的方式提问。
04
SWaP-C 和性能
SWaP-C 是研发和军事应用领域的常用术语,它代表“尺寸、重量、功率和成本”。所有应用类型都需要 SWaP-C 最佳的设备、系统和程序。ITS 应用也不例外。近年来,低成本的板级 ITS 相机已逐渐普及。但性能缩水的相机并不能满足要求。这些相机必须在 SWaP-C 和性能之间取得平衡。Teledyne FLIR 取得这种平衡的一种方式是保证其所有板级相机的功能集与盒装版相机相同。
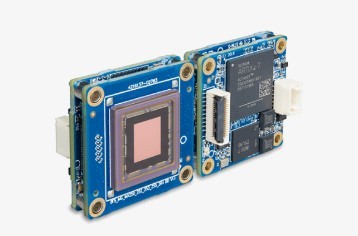
图 3:尽管采用紧凑型设计,Teledyne FLIR 板级相机提供的功能集与盒装相机相同。
ITS 的一个趋势是部署高分辨率相机,以覆盖公路上的多个车道。例如,以前使用配备低分辨率图像传感器的板级相机的集成商可能会希望将 130 万像素的相机升级为 890 万像素,或 1200 万像素的相机。但如果新相机与之前型号的相机外形不同,集成商就要进行重新设计和重新认证。Teledyne FLIR 为不同分辨率的板级相机采用相同的外形规格,因此,集成商可以更容易地升级系统。
05
嵌入式转变
和机器视觉市场一样,ITS 已经开始向采用低功耗、小型化设计、具有边缘计算功能的嵌入式系统转变。一提到 ITS 中的嵌入式系统,首先想到的应用场景可能是车载系统,但嵌入式系统几乎可以适应任何 ITS 或智能城市应用场景。
集成商应对一些流行的嵌入式硬件选择进行适用性评估。例如,相机能否与 NVIDIA 的 Jetson TX2 或 Xavier 嵌入式模块配合使用?许多 ITS 应用场景涉及复杂的算法,需要一个能够处理这些算法的系统。
为此,Teledyne FLIR 推出了适用于 TX2 的 Quartet 载板。它专为 ITS 应用场景而定制,允许客户直接将四个板级 USB3 相机连接到 TX2,无需集线器或转换器。采用同轴线缆供电的电路板中每个连接器都有自己的总线,因此不需要与其他连接共享带宽。例如,利用 Quartet,集成商可以同时部署用于总体背景的高分辨率彩色相机、用于 ANPR/ALPR 的单色相机,以及偏振相机,以观察挡风玻璃后的情况,所有这一切都可以通过单一连接的一套系统实现。
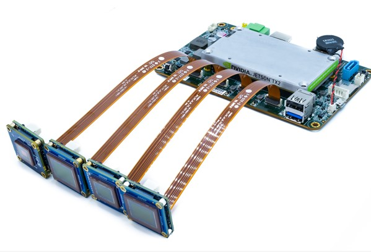
图4:Quartet 载板专为 Jetson TX2 而设计,可在空间受限的应用场景下连接四个相机。
06
坚固耐用、可靠
ITS 应用场景下采用的相机必须能够在物理方面满足处理任务的要求。例如,对于车载应用,集成商必须考虑相机在极端温度下运行的能力。虽然许多相机集成在保护性外壳中,以承受风雨天气的影响,但相机仍需具备在高温(超过 50 摄氏度)下工作的能力;Teledyne FLIR 确保其所有型号的相机都成功通过 HALT 试验(高加速寿命试验),保证相机在 -30 到 80 摄氏度之间不会发生故障。
在选择相机时,集成商还必须考虑冲击和振动。相机必须符合冲击和振动的行业规范,以确保图像质量和系统的长期可靠性。在购买相机时,集成商应研究其所接受的测试类型。Teledyne FLIR 相机的振动测试是有公开记录的。
一般而言,ITS 相机必须有极高的可靠性。借用体育界的一句老话,“最重要的能力是能上场”。相机必须能够长时间执行所需的任务,而不会发生故障或损坏,并且无需更换。所有 ITS 集成商都知道在已经部署的系统中更换相机的成本和麻烦。集成商可以通过选择经验证可在 ITS 环境中连续运行多年的高品质相机来避免这种不便和尴尬。
07
时间戳和 GPS 数据
GigE Vision 相机之所以在 ITS 应用中很受欢迎,原因有很多,其中就包括支持超长的电缆。另一个原因知道的人略少一些,那就是其能够支持 IEEE 1588 精确时间协议 (PTP)。支持 IEEE 1588 PTP 的相机可在曝光的时间点准确地为图像加盖时间戳。此外,该标准还提供了一些高级功能,例如允许多个相机根据基于时间的内部命令来进行图像的同步采集,而无需外部触发。
图5:路径延迟经计算可纳入同步设备时钟过程中。主设备将两个信号发送到位于 (1) 和 (2) 的从动装置。然后辅助设备将信号发回 (3),计算路径延迟并用于同步时钟 (4)。
该标准很重要,因为它可以实现与外部硬件同步,并将 GPS 数据嵌入到图像流。例如,准确检测出违反限速(无雷达)的车辆。两个不同时间点的时间戳可以帮助确定车速是否超出速度限制,而两个时间点的精确图像时间也可以简化高精度速度分析的过程。
时间戳对基于门架的自动收费执行也很重要。时间戳不准就不会生成整车图像;时间戳必须同步才能执行收费。在系统设计方面,购买前必须考虑时间戳的需要。
系统的成功实现
目前市场上的一些相机不可避免地会出现故障,令人头痛,更不用提损失的时间、资金、声誉和公众信任了。请记住,在评估相机时一定要考虑图像质量、硬件灵活性、嵌入功能、物理设计和可靠性,以及时间戳和 GPS 数据的重要性。只要考虑了这些因素,集成商就为整个系统的成功奠定了基础。
Teledyne FLIR 提供一系列坚固耐用的紧凑型工业相机,能够可靠地部署到各种 ITS 项目中,可以满足从低分辨率 (130 万像素)一直到针对多车道覆盖的高分辨率(2000 万像素以上)的各种需求。立即联系我们,了解我们的相机如何改变您的 ITS 应用,无论是现成产品,还是根据您的特定需求提供定制产品。

图 6:Teledyne FLIR 的 Blackfly S 等相机采用 Sony 最新的 Pregius 和 Pregius S 系列 CMOS 图像传感器技术。
审核编辑 :李倩
-
图像传感器
+关注
关注
68文章
1903浏览量
129571 -
智能交通
+关注
关注
12文章
804浏览量
43484 -
工业相机
+关注
关注
5文章
325浏览量
23650
原文标题:七种方法为智能交通系统选择适用的相机
文章出处:【微信号:机器视觉沙龙,微信公众号:机器视觉沙龙】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
RFID技术对智能交通系统有哪些影响?
XPE在智能交通系统中有哪些应用?
使用毫米波传感器获得智能交通系统的智能检测和追踪功能

什么是智能交通_智能交通是干什么的_智能交通系统的作用
智能交通系统的功能
智能交通系统的意义
智能交通系统的应用
总结:维修电路板七种方法资料下载

七种方法为智能交通系统选择适用的相机





 工商网监
工商网监
评论