 动起来!步进电机控制解惑
动起来!步进电机控制解惑
本文导读
近几年新能源汽车快速发展,步进电机大量应用于电子水阀、空调电子出风口、仪表盘、随动转向大灯、主动进气格栅等部件。步进电机是什么?怎么才能让它转起来?本文将带您了解步进电机 ,让步进电机动起来!
步进电机的介绍
1.简介步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。步进电动机的结构形式和分类方法较多,一般按励磁方式分为磁阻式、永磁式和混磁式三种;按相数可分为单相、两相、三相和多相等形式。 步进电机价格便宜,拥有优秀的启停和反转响应,因为没有电刷,可靠性和寿命都较高,并且控制简单,由于其没有过载能力,且不能高速运行,常常被使用在低速、低负载有位置控制要求的场合,在各个领域都被广泛应用。 步距角是步进电机的一个重要参数,步距角越小步进电机的控制精度越高。例如步距角1.8°,整步驱动控制时,给1个脉冲信号,电机就转动1.8°,给200个脉冲信号,电机机械角度转动一圈。

图1 2.驱动方式步进电机种类很多,下文将介绍两相四线双极性步进电机的3种驱动方式。
整步驱动
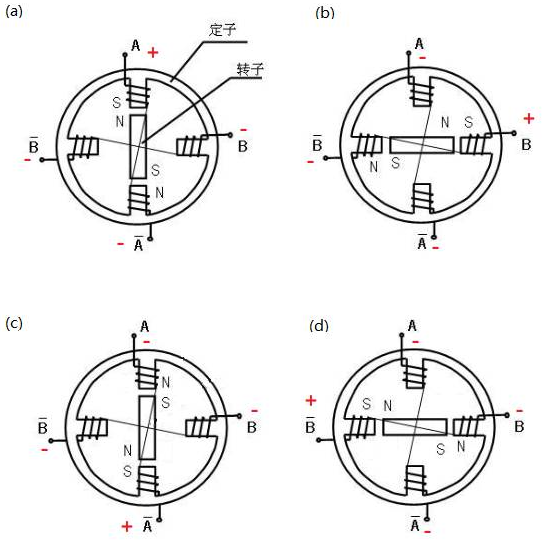
图2
整步驱动可以单拍导通或双拍导通。图2为单拍导通:A –> B -> A- -> B- -> A ,由A导通切换成B导通时((a)到(b)的过程),吸引转子转到B,因为步进电机内部有Z个齿数,这个过程实际上是最近的齿转动到B方向,即一个步距角。
双拍导通:AB –> BA- -> A-B- -> B-A -> AB ,由于两相导通,电流更大,可提供更大的转矩。导通顺序反过来即可实现反转。 整步驱动实现简单,但控制精度低且振动明显。
半步驱动
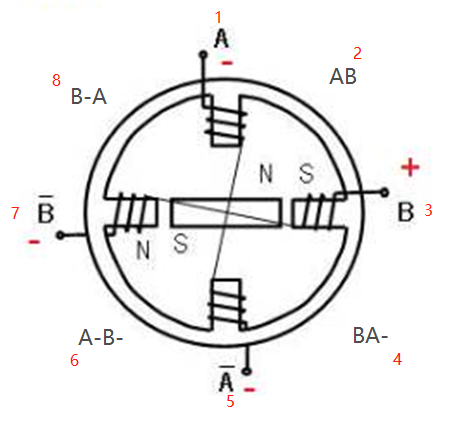
图3
半步驱动和整步驱动相似,半步驱动为单、双拍混合导通:A –> AB –> B -> BA- -> A- -> A-B- -> B- -> B-A -> A 。使用半步驱动,步距角缩小一半,控制精度提高、振动降低,但转矩不平稳。 3.细分驱动
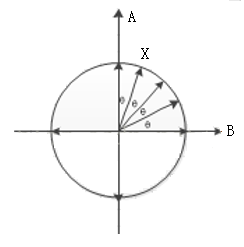
图4
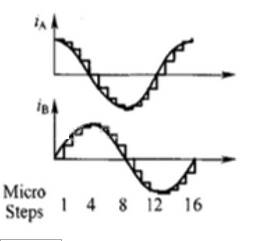
图5
步进电机的细分驱动实际上是矢量控制。图4是步进电机的四细分控制,一个步距角细分成4步,以提高控制精度,其原理为:控制A相输出电流大小为IA=I*cosθ,B相的为 IB=I*sinθ时,合成X方向,大小为I的电流,相当于合成X方向的磁场,让转子转动到X方向的位置。细分角度顺时针增大为2θ、3θ等,通过控制A、B相电流大小,合成对应角度的电流,就实现步进电机顺时针转动。因为合成磁场大小和电流大小成正比,当相电流I1=I*k时(0
步进电机的实际应用除了考虑驱动方式,还需要选择一块主控芯片,不同的主控芯片的控制方案不相同。一般步进电机的控制方案为:MCU+驱动器+步进电机,由于使用驱动器,需要占用不少的板载空间,而且成本也相对较高。而使用高集成度的电机控制芯片,可以将方案简化为:MCU+步进电机,这样的方案无疑可以节省空间和开发成本。NSUC1610是纳芯微推出的一款高集成度的电机控制芯片,非常适合应用于车载步进电机控制。
1.芯片特点
ARM Cortex-M3 内核
64KBytes Flash, 4KBytes SRAM, 512 Bytes EEPROM
工作电压 5.5V~18V ,可承受40V短时间过压
1个12bit 高精度1MSPS ADC
2个8bit DAC
3个快速反电势比较器BEMFC
支持3线4线SPI通信
1个LINUART模块,集成LIN PHY,支LIN2.X通信
3个16bit 输入捕获模块
2个16bit 定时器
1个窗口看门狗和1个数字看门狗
4路半桥输出 ,4路增强型互补 EPWM 输出,内部有过流保护,可输出100%占空比
每路MOUT输出电流可达1A,1个软件可控制的高边驱动
1个5V输出的LDO和1个1.8V输出的LDO
1个温度传感器 ,内部集成过温关断功能,可以保护桥臂,防止出现过温
支持环境温度-40~150,结温-40~175,全温范围内静态功耗小于50uA
QFN32封装,仅5x5mm,符合AEC - Q100
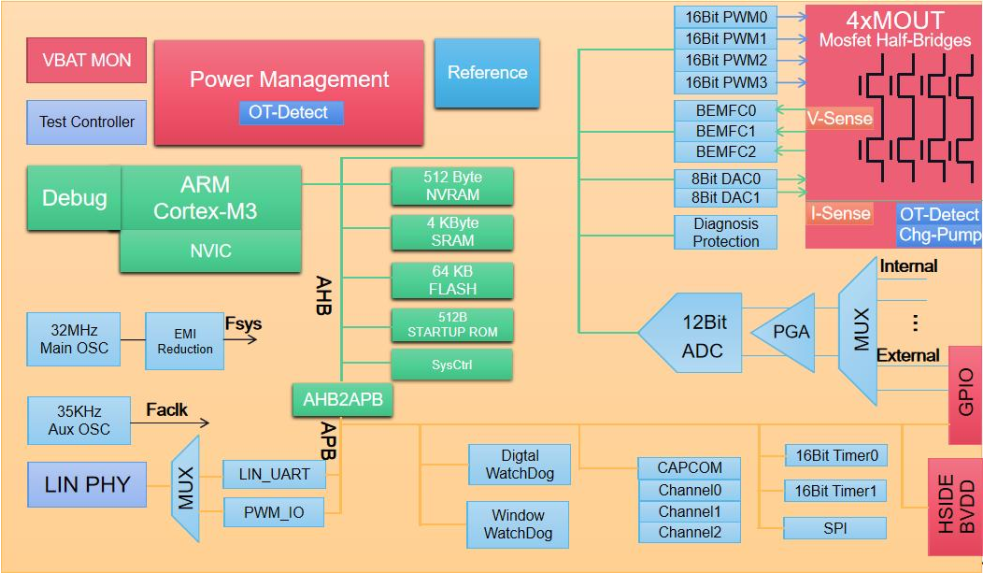
图6NSUC1610框图
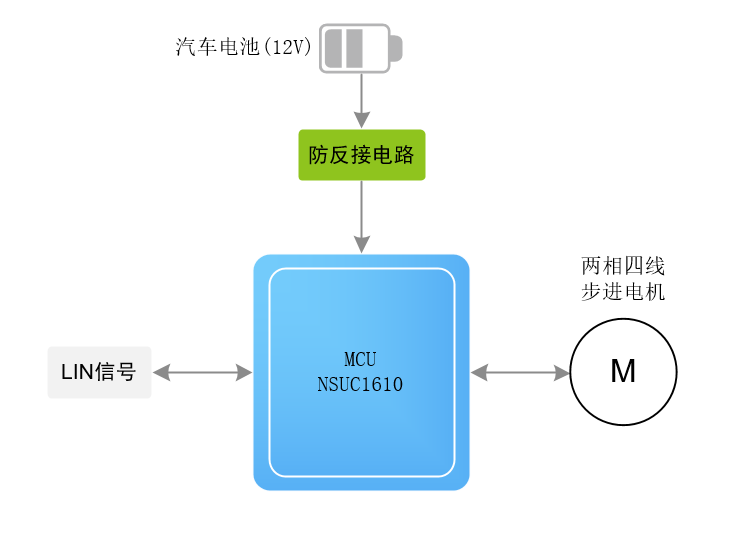
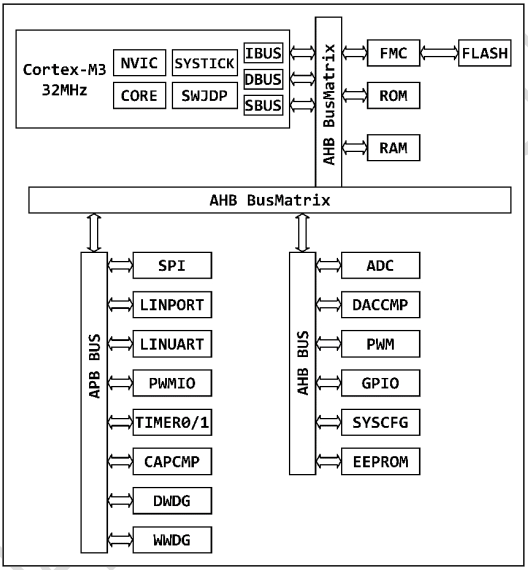
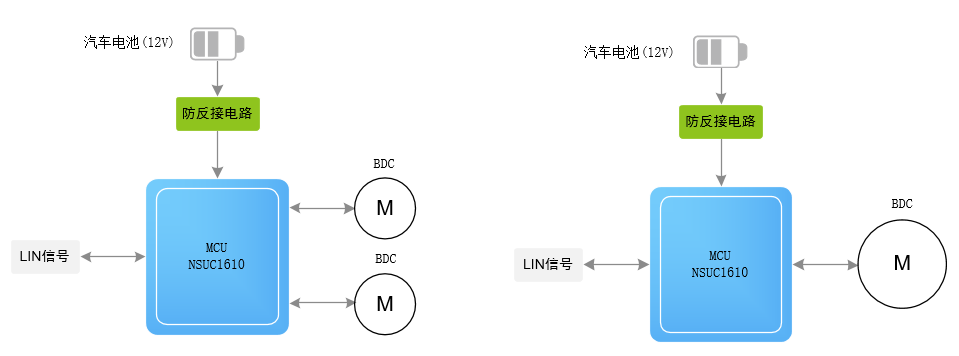
NSUC1610内部集成驱动和4路半桥,可支持驱动直流有刷电机、直流无刷电机、步进电机和继电器等。此芯片可以用来设计车用小尺寸、小功率、高效率电机智能执行器应用,例如热管理系统中的电子水阀、空调电子出风口、主动进气栅格系统执行器(AGS/AGM)、座椅通风无刷直流电机(BLDC)驱动、随灯转向大灯(AFS)、旋转/升降大屏控制、自动充电口和自动门把手等。 2.步进电机控制方案 如图7所示,NSUC1610芯片的硬件控制方案非常简单,几乎不需要搭建外部电路,LIN是直连芯片的LIN的输入引脚,不用收发器、电机驱动方式也是直连芯片。如图8为NSUC1610芯片的总线架构,芯片内核使用独立的数据总线和地址总线,能够提高取指令和取数据的效率。 步进电机的控制使用到的关键模块为: DACCMP(BEMFC模块)、ADC、LINPORT、LINUART、TIMER0、TIMER1和EPWM模块。 其中LINPORT和LINUART用于LIN通信;EPWM用于4路MOUT的PWM输出;DACCMP用于电流控制,两个8bit的DAC用于控制A、B相的电流大小,合成相应的电流矢量以实现细分驱动;TIMER0和TIMER1可分别用于细分步的定时(控制每个细分步的执行时间)和各种任务的定时调度;ADC可用于芯片温度监测和其他模拟信号的采集。
图7步进电机控制方案框图
图8NSUC1610总线架构
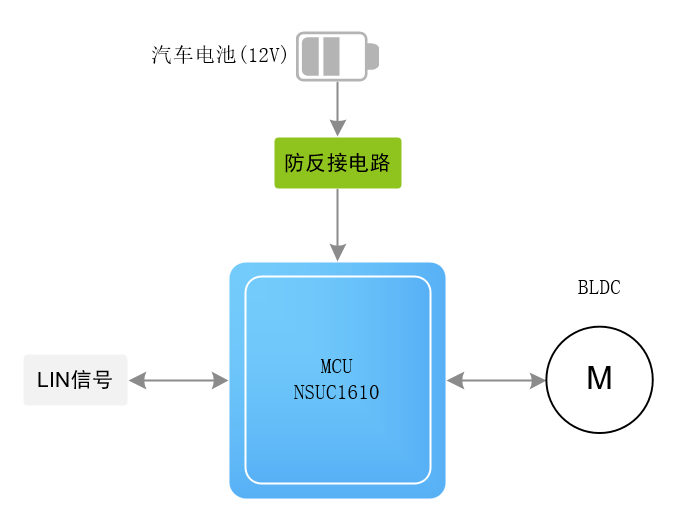
3.芯片优势 1. 封装小巧,内部集成4路半桥,无需外部搭建半桥电路、LIN收发器等,仅需电源防反接等少量外围电路设计,减少PCB设计成本、难度、空间。 2. 支持两相四线小功率步进电机细分控制,可支持32细分。 3. 支持小功率BLDC的无感控制和带HALL的有感控制(图9)。 4. 支持两个小功率BDC电机的控制,或一个较大功率的BDC电机控制(图10)。 5. 可配置的DAC,用于过流保护和步进电机的微步控制。具有过流保护,桥臂过流自动关断的功能。 6. 每路MOUT输出电流可达1A,内部半桥高边采用电荷泵驱动,支持100%占空比导通。 7. PWMIO可复用到LIN引脚,便于客户使用12V高压PWMIO直接来做电机控制。 8. 双路温度传感器:一个位于功率侧做过温热关断,一个位于低压侧做芯片温度检测。 9. Cortex M3处理器,编译环境采用Keil标准编译和开发工具,编程器资源通用,开发调试简单。 10. 晶圆结温高达175°C,满足车规Grade 0应用目标。
图9BLDC控制方案
图10两种BDC控制方案
步进电机驱动的方式多种多样,需要结合应用场景的控制精度选择不同的控制方式与主控芯片。NSUC1610支持12V汽车电池供电,可满足大部分使用场景,有助于客户减小PCB尺寸,简化生产设计,实现更高效、更紧凑以及高性价比的电机控制应用设计。立功科技可提供芯片外设模块例程、步进电机细分驱动的例程和相关软硬件设计参考,降低开发难度和成本,协助厂商实现快速开发。
审核编辑 :李倩
-
步进电机
+关注
关注
152文章
3121浏览量
147942 -
转速
+关注
关注
3文章
122浏览量
22060 -
脉冲信号
+关注
关注
6文章
400浏览量
37109
发布评论请先 登录
相关推荐
请问怎么使无刷电机动起来,就单单动起来
用过的几款步进电机驱动IC 精选资料下载
怎样通过普通IO的驱动6步换相方式成功让BLDC电机转动起来
让步进电机动起来——L298N驱动步进电机

你知道操作系统是如何启动起来的吗
BeagleBone AI-64、Servo Cape和让电机动起来
步进电机如何让动起来?步进电机转动原理
e络盟互动社区发起“动起来”设计大赛






 工商网监
工商网监
评论