 复杂约束下自动驾驶车辆的运动规划解析
复杂约束下自动驾驶车辆的运动规划解析

01什么是MotionPlanning
Motion Planning是在遵循道路交通规则的前提下,将自动驾驶车辆从当前位置导航到目的地的一种方法。
在实际开放道理场景下,自动驾驶要处理的场景非常繁杂:空旷的道路场景、与行人、障碍物共用道理的场景、空旷的十字路口、繁忙的十字路口、违反交通规则的行人/车辆、正常行驶的车辆/行人等等。场景虽然复杂,但都可以拆解为一系列简单行为(behavior)的组合:
将这些简单的行为(behavior)组合起来,就可以完成复杂的驾驶行为。
02Motion Planning的约束条件(constraints)
Motion Planning是一个复杂的问题,它的执行过程需要满足很多约束条件:
2.1 车辆运动学约束
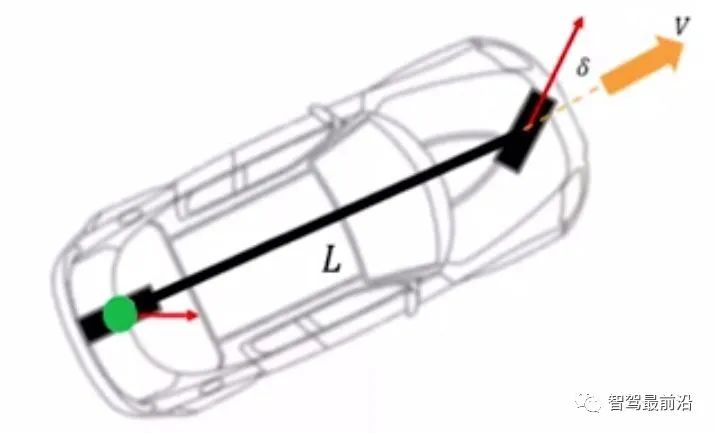
车辆运动受到运动学约束,比如它不能实现瞬时侧向移动,前驱的车辆必须依赖前轮的转向才能实现变道、转向等操作,在弯道上不能速度过快等等。通常我们采用单车模型(Bicycle Model)对车辆运动进行建模。
2.2 静态障碍物(Static Obstacle)约束
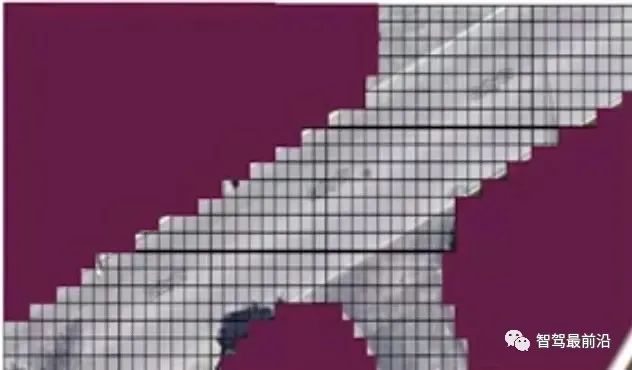
静态障碍物(Static Obstacle)是道路上静止的车辆、路面中间的石墩子等车辆不可行驶的区域。Motion Planning需要避开这些静态障碍物,避免与它们发生碰撞。解决碰撞的思路大概有两种:
1)将静态障碍物(Static Obstacle)在网格占位图中表示出来,然后检测规划路线是否与静态障碍物区域相交。
2)将车辆的轮廓扩大,比如扩展成一个圆形,然后检测障碍物是否与Circle发生碰撞。
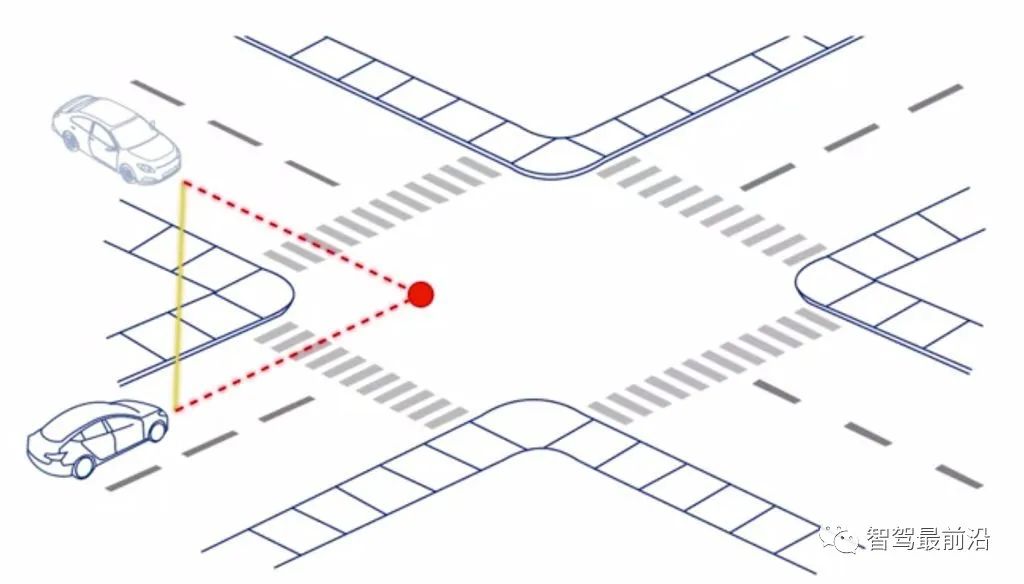
2.3 动态障碍物约束
Motion Planning要实时处理行人、车辆等各种运动的障碍物,避免与障碍物发生碰撞事故。
2.4 道路交通规则约束
车辆在道路上行驶必须要遵守车道线约束规则(比如左转专用道只能左转、实线不能变道、路口必须遵守红绿灯的指示)和各种标志标牌的指示。

03Motion Planning的优化目标
了解Motion Planning的约束条件之后,需要构造目标优化函数,然后最小化目标函数,从而获得在当前环境下的最优运动轨迹。目标函数的种类有很多,下面枚举一些常用的目标函数。
1)关注路径长度(Path Length),寻求到达目的地的最短路径。
2)关注通行时间(Travel Time),寻求到达目的地的最短时间。
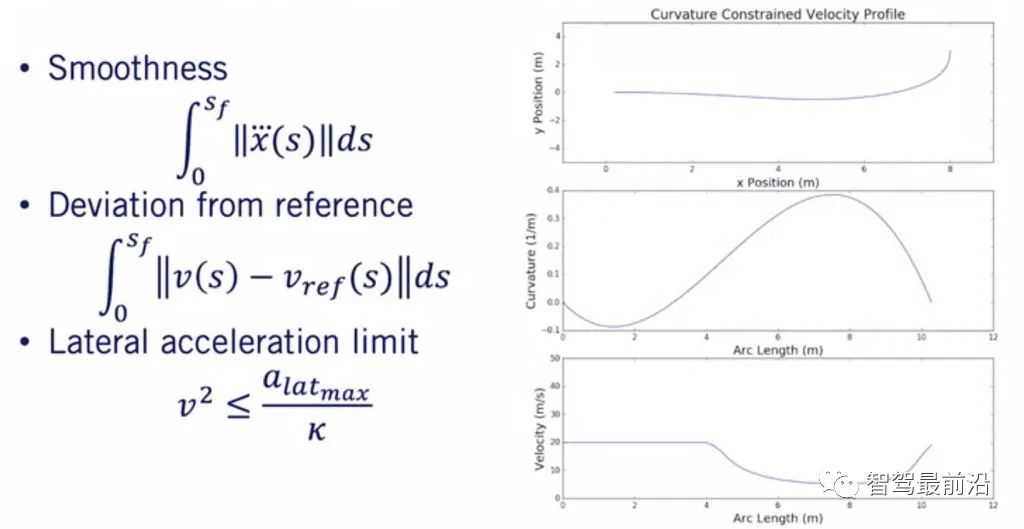
3)惩罚偏离参考轨迹和参考速度的行为。
4)考虑轨迹平滑性(Smoothness)
5)考虑曲率约束(Curvature)
通过组合设计自己的目标优化函数,从而获得较好的Planning效果。
04分级运动规划器
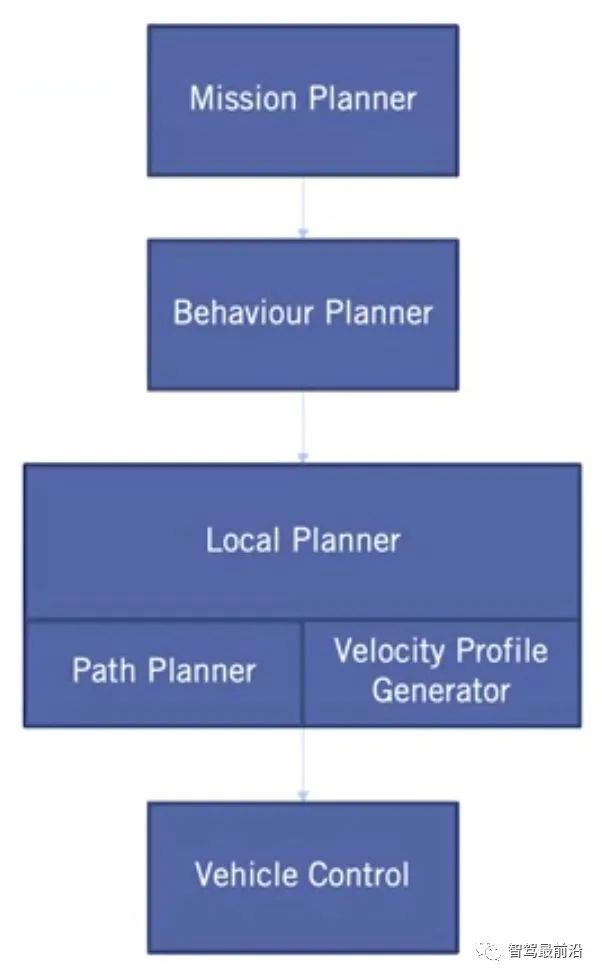
Motion Planning是一个异常复杂的问题,所以通常我们把它切分为一系列的子问题(Sub Problem)。比如Mission Planner、Behavior Planner、Local Planner、Vehicle Control等。
4.1 Mission Planner
Mission Planner关注High-Level的地图级别的规划;通过Graph Based的图搜索算法实现自动驾驶路径的规划。

4.2 Behavior Planner
Behavior Planner主要关注交通规则、其它道路交通参与者(自行车、行人、社会车辆)等等,决定在在当前场景下应该采取何种操作(如停车让行、加速通过、避让行人等等)。
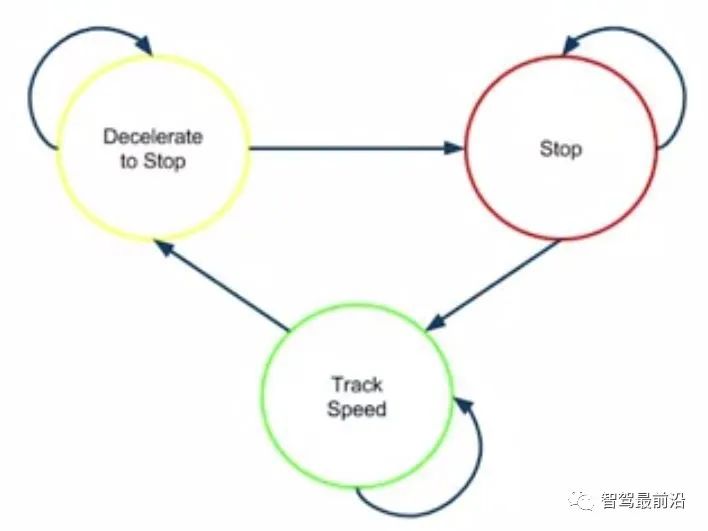
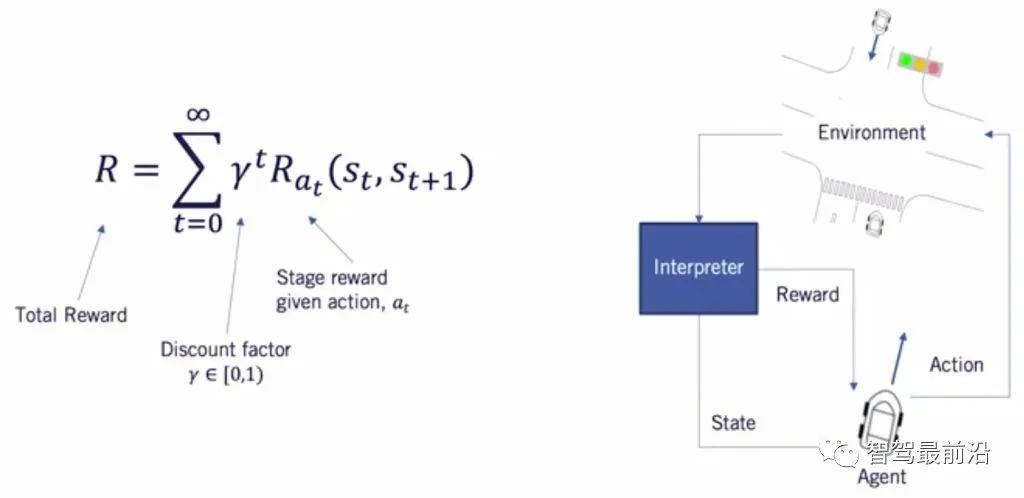
Behavior Planner的实现方式比较常见的有几种:有限状态机(Finite State Machines)、规则匹配系统(Rule Based System)、强化学习系统(Reinforcement Learning)。
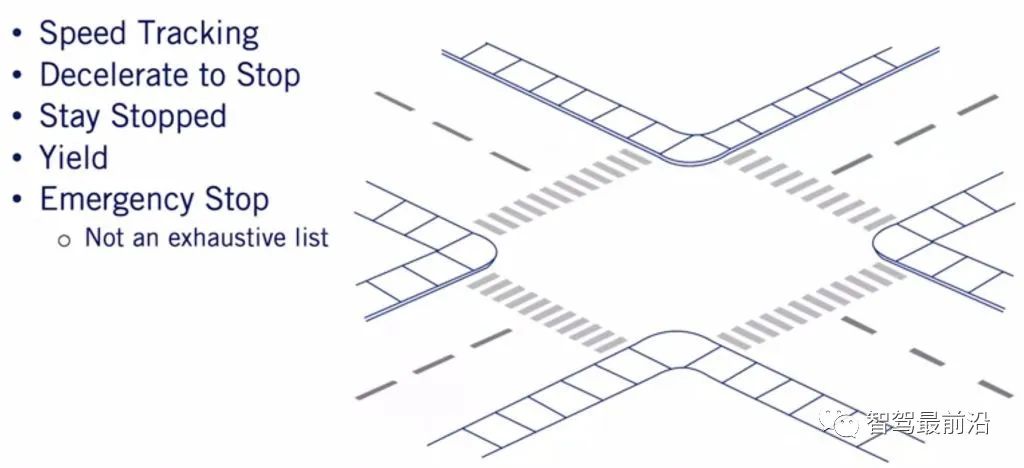
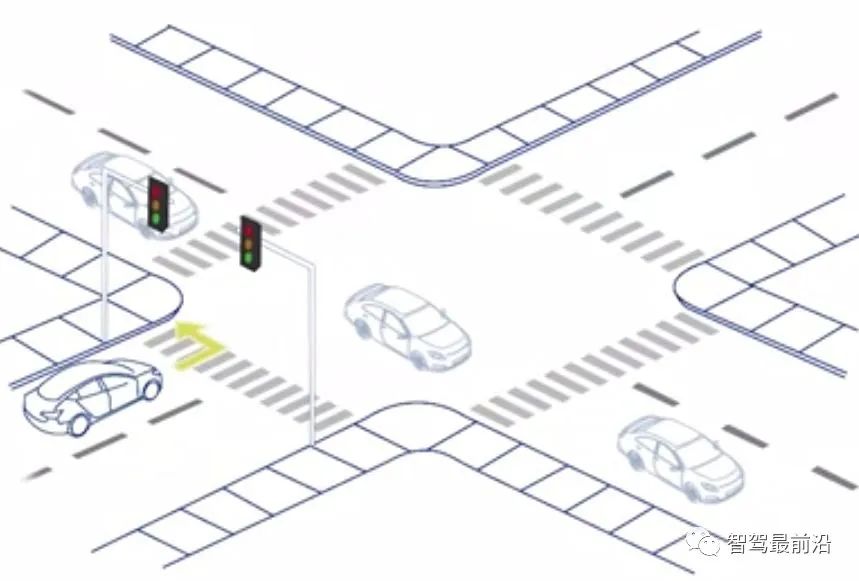
有限状态机中的State是各个行为决策,根据对外界环境的感知和交通规则的约束在各个状态之间转换。比如在路口红绿灯的场景,当路口交通灯为红色不可通行时,车辆会首先切换到Decelerate to Stop状态,然后在路口停止线完全停下来,进入Stop状态,并持续在Stop状态等待,直至交通灯变为绿色允许车辆通行,车辆进入Track Speed状态,继续前行。
Rule-Based System是通过一系列的分级的规则匹配来决定下一步的决策行为。比如交通灯绿色->通行;交通灯红色->停车等待。

基于强化学习的Behavior Planner系统如下:
4.3 Local Planner
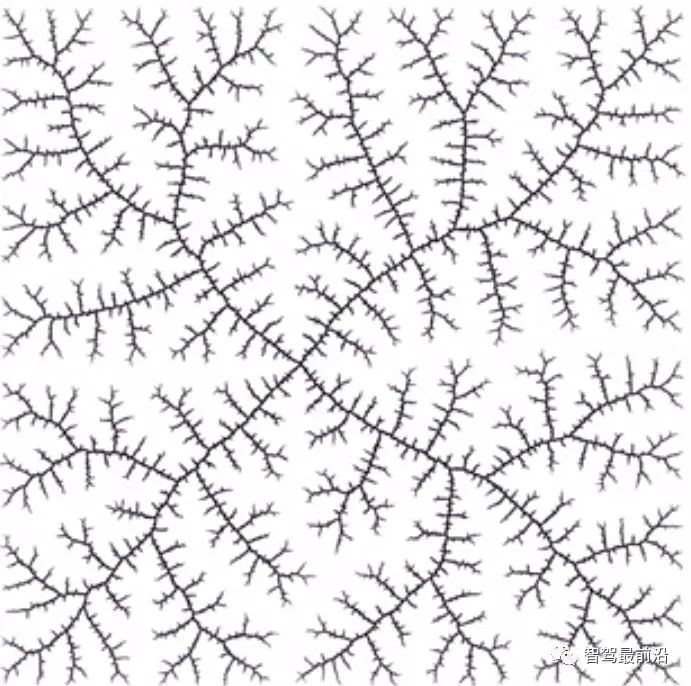
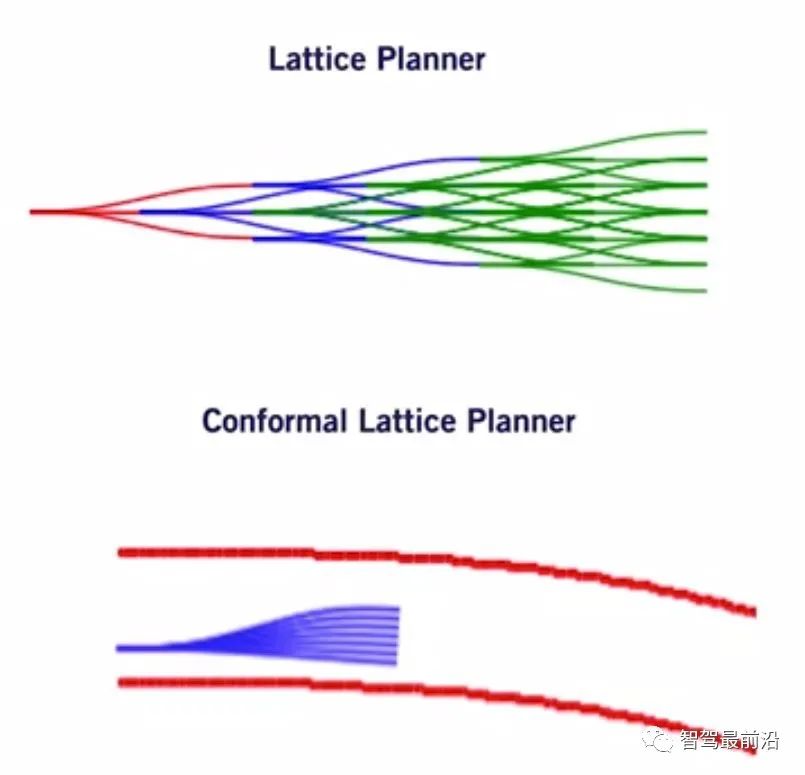
Local Planner关注如何生成舒适的、碰撞避免的行驶路径和舒适的运动速度,所以Local Planner又可以拆分为两个子问题:Path Planner和Velocity Profile Generation。Path Planner又分为Sampling-Based Planner、Variational Planner和Lattice Planner。
最经典的Sampling-Based Planner算法是Rapidly Exploring Random Tree,RRT算法。
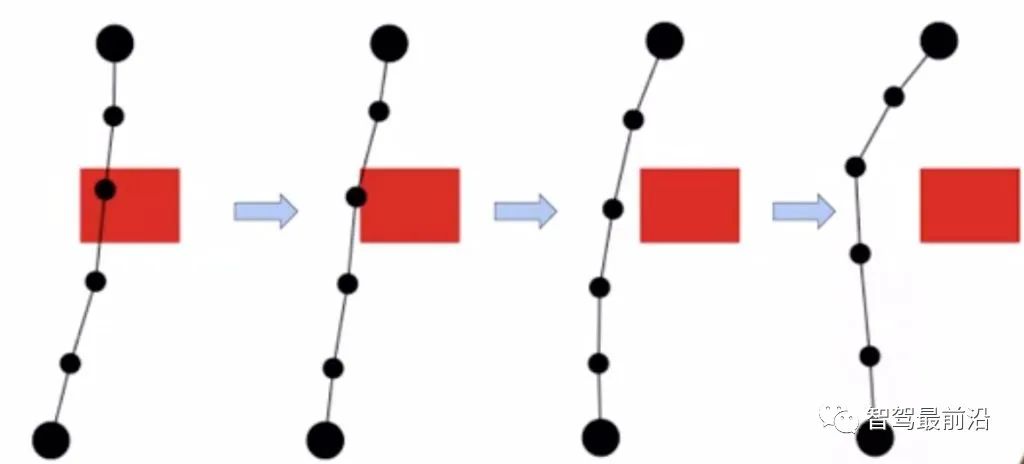
Variational Planner根据Cost Function进行优化调整,从而避开障碍物,生成安全的轨迹。
Lattice Planner将空间搜索限制在对车辆可行的Action Space。
Velocity Profile Generation要考虑到限速、速度的平滑性等。
Vehicle Control将Planner的规划结果转化为车辆的运动行为。
审核编辑 :李倩
-
网格
+关注
关注
0文章
153浏览量
16658 -
自动驾驶
+关注
关注
795文章
15047浏览量
181947
原文标题:复杂约束下自动驾驶车辆的运动规划解析
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录



评论