 NeRF2NeRF神经辐射场的配对配准介绍
NeRF2NeRF神经辐射场的配对配准介绍
大家好,今天要介绍的论文是来自多伦多大学和谷歌研究室的NeRF2NeRF:神经辐射场的配对配准。
摘要 我们介绍了一种神经场成对配准的技术,它扩展了基于优化的经典局部配准(即ICP)以操作神经辐射场(NeRF)。
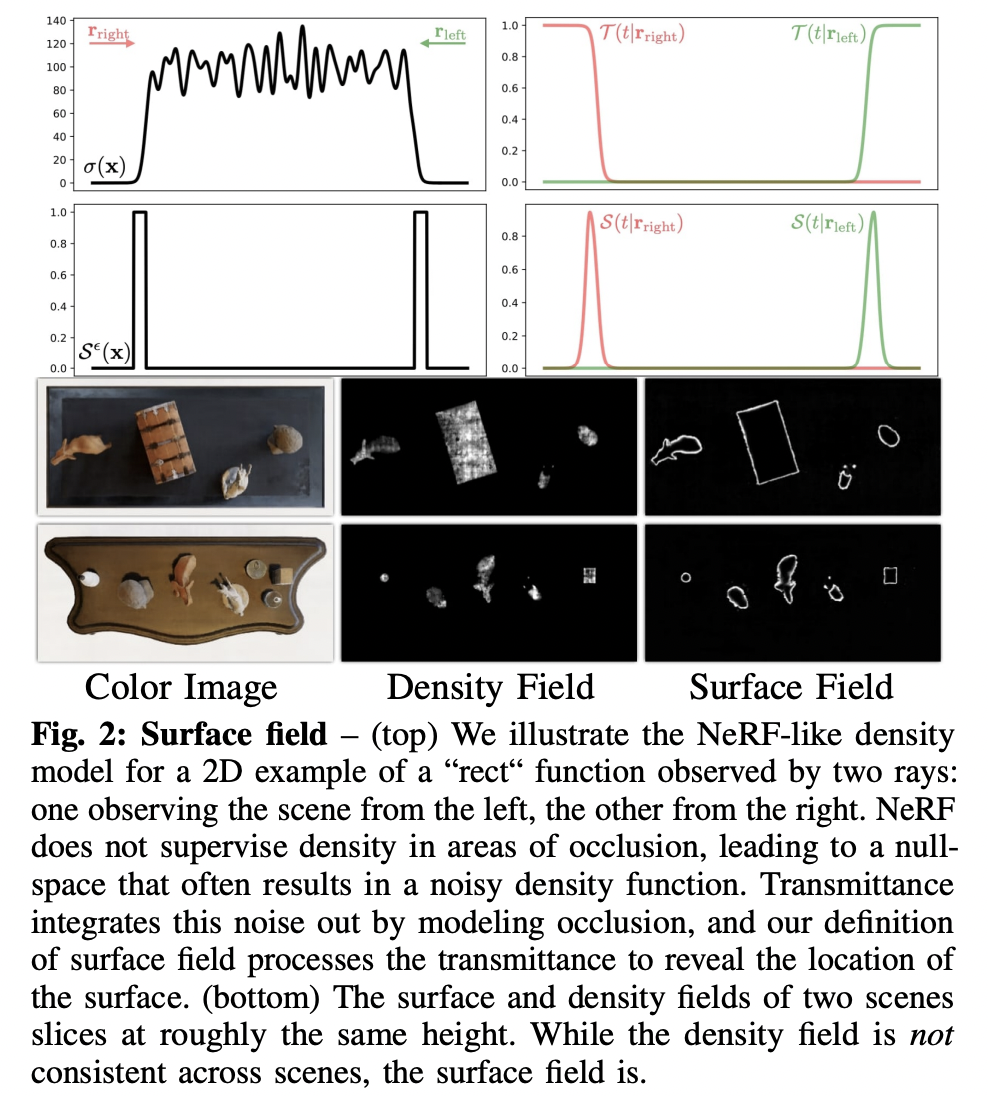
NeRF不分解光照和颜色,因此为了使配准不受光照影响,我们引入了 "表面场 "的概念(Surface Field)--从预先训练的NeRF模型中提炼出来的场,用于测量一个点在物体表面的概率。
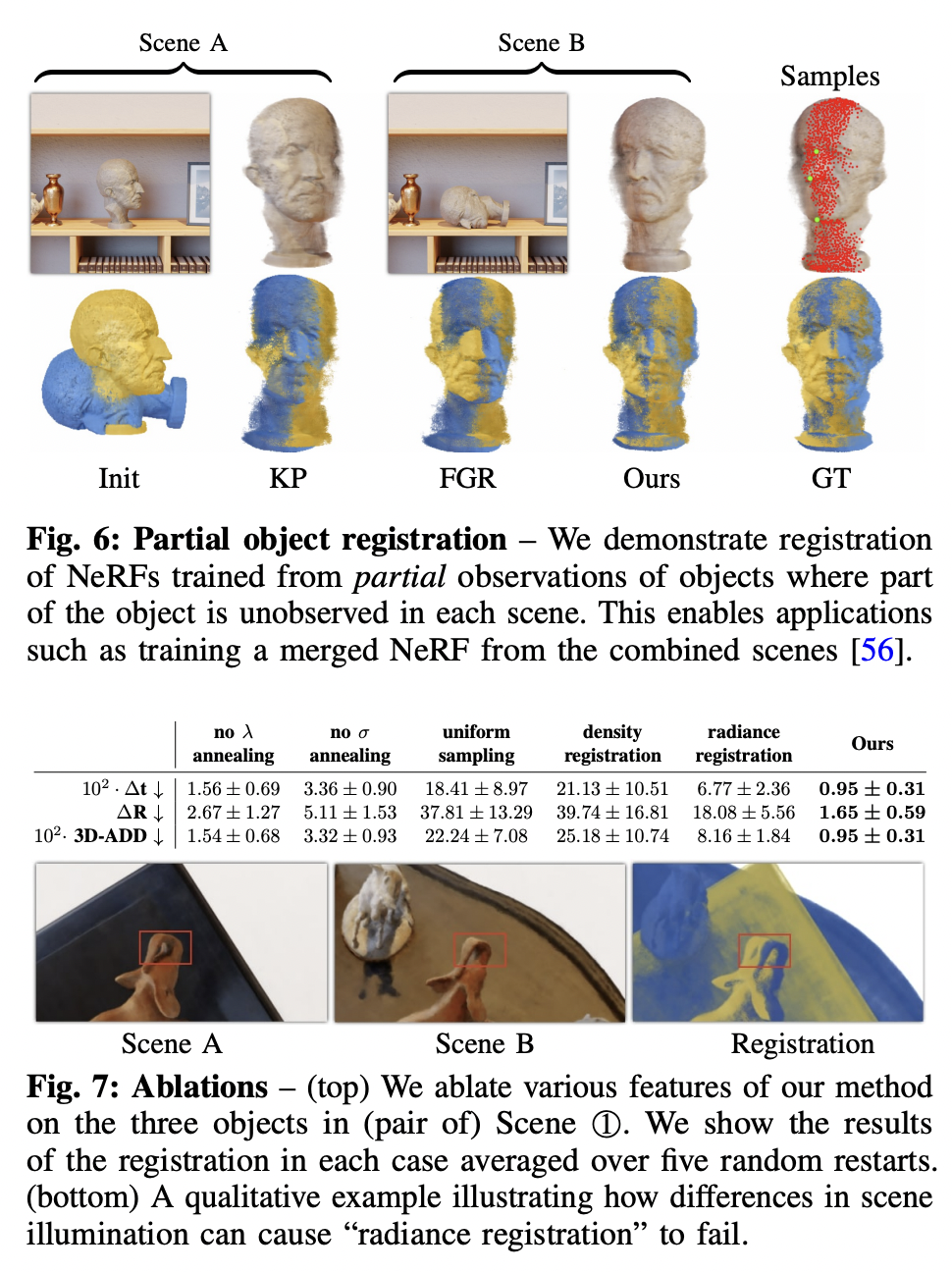
然后,我们将nerf2nerf配准作为一个稳健的优化,迭代地寻求一个刚性的变换,使两个场景的表面场对齐。
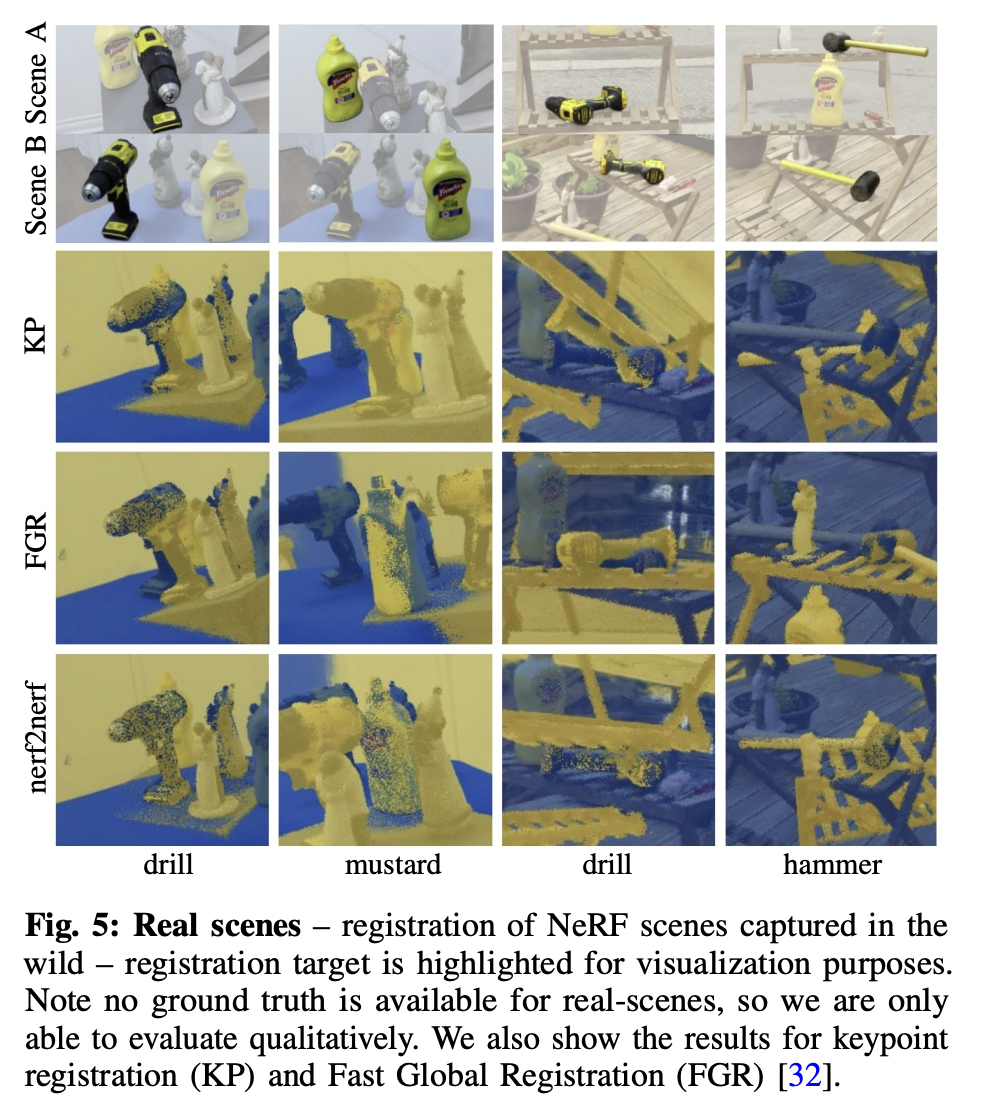
我们通过引入预训练的NeRF场景数据集来评估我们技术的有效性--我们的合成场景能够进行定量评估并与经典的配准技术进行比较,而我们的真实场景则证明了我们的技术在真实世界场景中的正确性。
主要贡献
提出了一种对包含同一物体的两个场景的NeRFs进行配准的方法。
引入表面场作为一个点在物体表面的概率进行配准。
在几个相应的点上对准初始化后,使用NeRF场进行高精度优化。
主要方法: 使用NeRF进行定位主要存在以下问题:
由于色彩信息在不同场景中不一致导致照明和颜色不能分开。
由于物体内部的密度场是有噪声的,没有对闭塞区的密度进行监测的方法。
本文使用的方法是通过使用响应对象表面的场的概率来保持一致性,用以配准两个不同神经场下的场景。
表面场:表面场的主要作用是对渲染过程中透明度变化较大的区域做出反应,假设相机的位置在物体之外,搜索来自每个相机的射线,计算每个参考相机的 "短间隔内的透明度变化",并使用最大值作为"表面场"。
最大值被用作表面场。

设计了一个目标函数,使两个场景之间的坐标变换[R,t]得到优化,这里使用场景之间对应点的表面场值的残差: 
用高斯分布对表面场进行卷积,并对其进行平滑处理。
主要结果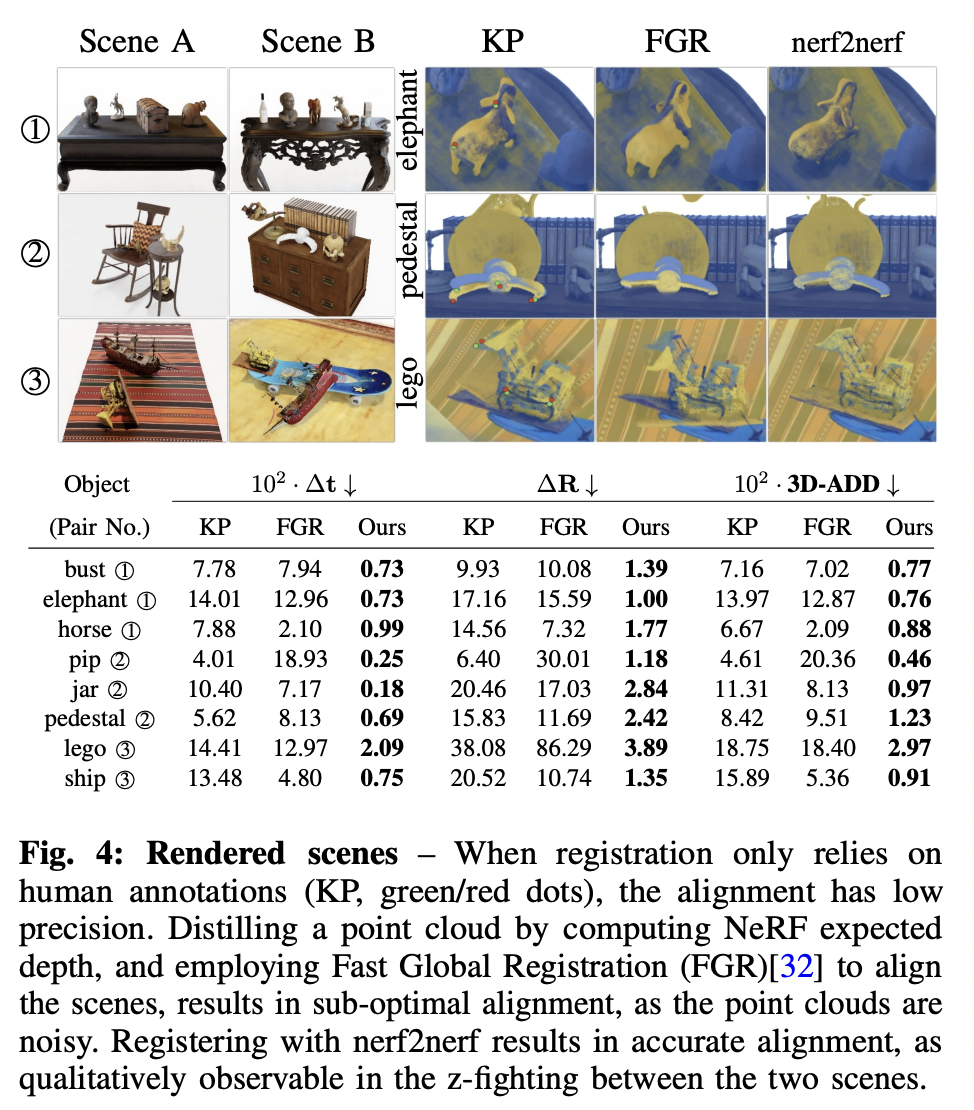
审核编辑:刘清
-
卷积网络
+关注
关注
0文章
42浏览量
2258
原文标题:NeRF2NeRF:神经辐射场的配对配准
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
真双极和准双极,差动跟伪差动使用的性能有差别吗?
FRED应用: LED混合准直透镜模拟

MG-SLAM:融合结构化线特征优化高斯SLAM算法

8线卡接式配线模块详细介绍
天准科技发布国内首台40nm明场纳米图形晶圆缺陷检测设备
准直器的工作距离和什么有关
人工智能神经网络芯片的介绍
京准电钟:GPS时钟服务器(NTP授时服务器)资料详细介绍书

蓝牙模块配对机制基础知识
安卓 15 Beta 2: 隐私空间及应用配对保存功能的新增
NVIDIA Instant NeRF将多组静态图像变为3D数字场景
LiDAR4D:基于时空新颖的LiDAR视角合成框架





 工商网监
工商网监
评论