 PWM控制下电压反馈和电流反馈简介
PWM控制下电压反馈和电流反馈简介

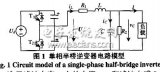
脉冲宽度调制(PWM)控制有两种基本类型。它们的区别在于反馈回路的表现或者说什么是被控制的变量。一种控制技术是电压控制(电压模式),其中占空比δ正比于实际输出电压与 参考电压的差值。而在电流控制(电流模式)中,占空比δ正比于参考电压与一个电流有关的电压之间的差值,在非隔离型拓扑中这个电流是通过功率开关的电流,而在隔离型拓扑中 这个电流是初级绕组电流。
一个稳压器只通过调节占空比对负载电压的变化做出响应。由于它不直接测量负载电流或者 输入电压,如果负载电流或输入电压有任何的变化,负载电压都需要一段时间才能响应。这个延迟对开关稳压器的控制表现是有影响的,所以一般需要一个或多个时钟周期来确保稳定 性。为了避免信号过冲或不稳定的输出电压,反馈回路是需要补偿的。
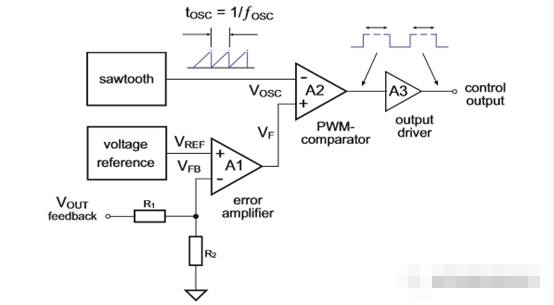
一个典型的电压模式PWM控制器如图所示。在这个电路中,A1是误差放大器,A2是PWM比较器,A3是可选用的输出驱动器,它的功能是控制功率开关的接口。一个振荡器生成周期性的锯 齿波电压VOSC,在开关稳压器的时钟周期开始的时候它的值是零,然后线性增长直至这个时钟 周期结束。误差放大器A1比较的是一个非常精确的有温度补偿的参考电压(VREF)与一个按比 例降低的DC-DC转换器的输出电压之间(VFB=VOUT×R2/(R1+R2))的差值。
误差放大器A1的输出电压VF正比于VREF和VFB的差值。在每个时钟周期开始时,VFB低于VREF,误 差放大器的输出VF和比较器A2的输出都是高电平的。随着转换器的输出电压变大,VF逐渐变 小直至低于正在上升的VOSC电压,自此以后,在接下来的周期里A2的输出都是低电平的。这就 说明了为什么占空比的变化和输出电压的变化是相反的(负反馈)。负反馈控制回路是稳定的。
电压模式的PWM控制器可能出现过冲,过度修正或者反向过冲,导致输出电压在一个高于或低于额定值的电位震荡。因此一般通过刻意减慢反馈响应的速度来避免转换器的这些表现。这么做的缺点是转换器对突然出现在负载或输入电压的变化的反应速度略慢。
如果需要一个反应速度很快的PWM控制器来加速阶跃响应(瞬态响应)的速度,那么可以用电流控制(电流模式)来弥补电压模式的这个缺点。
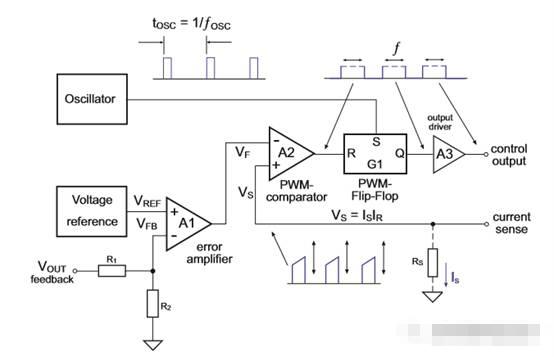
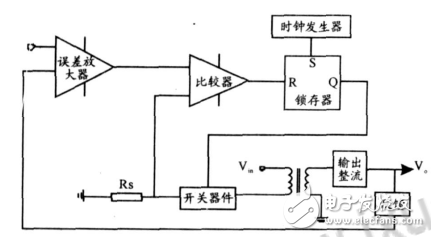
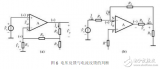
在电流模式控制的DC-DC转换器中,控制回路被分成两个反馈回路,一个是控制电流的内部控制回路,另一个是控制电压的外部控制回路。对每个脉冲,不仅输出电压的改变而且负载电 流的改变都可以得到补偿。一个典型的电流模式PWM控制器如图所示。如同电压控制电 路,A1是误差放大器,A2是PWM比较器,A3可选用的输出驱动器,不同的是电流控制器中多了一个触发器(flip-flop)G1。另一个振荡器生成频率为f的同步脉冲,一般这个频率要远远高于fosc。在每个周期开始的时候,这个脉冲启动触发器。
与电压模式PWM控制器一样,误差 放大器A1产生一个由VREF和VFB的差值所决定的输出电压,周期开始时,PWM输出电压是高电平 的。导通电流IS(功率开关中的电流或初级绕组中的电流),流经感应电阻RS,这个电阻两端 的电压是VS=RS×IS。随着转换器的输出电压逐渐上升,导通电流也开始上升直到感应电阻上的电压超过误差放大器的输出电压VF,这时PWM比较器的输出变为高电平,重置触发器并且关闭PWM的输出直至下一个周期开始。
电流模式稳压器中占空比的变化和输出电压的变化也是相反的,所以反馈回路也是稳定的。但是它有另一个优点就是外部电压控制回路设定了一个阀值,当到达这个阀值时内部电流控制回路开始调节开关或初级绕组中的电流尖峰。因为输入电流是与输出电流成正比的,如果 输出电流突然变化,初级绕组中的电流也会随之变化,电流模式PWM将在一个周期内对这个电流变化作出反应。因此仍然可以减慢外部电压控制回路的反应速度来避免输出电压的偏离震 荡问题,但是这种转换器可以对于输出电流变化立即做出反应。
电流模式的一个缺点是由于增加了额外的感应电阻,转化器的效率会降低。为了减少功耗, 这个电阻必须尽可能的小,但是这个电阻又必须足够大从而可以为比较器提供一个足够清晰的输入。事实上电流模式PWM的比较器相对电压模式的比较器必须有更高的质量,输入端的漂移偏差必须更小,对温度变化的稳定性必须更高。
-
控制器
+关注
关注
114文章
17909浏览量
195725 -
稳压器
+关注
关注
24文章
4999浏览量
100678 -
PWM
+关注
关注
116文章
5903浏览量
227053 -
DC-DC
+关注
关注
30文章
2498浏览量
87864 -
电流反馈
+关注
关注
0文章
40浏览量
12262
发布评论请先 登录
运放电路中的反馈是什么,如何判断是电流还是电压反馈
如何区分运放反馈是电压还是电流反馈?
基于PWM反馈的电源控制策略
开关电源五种 PWM 反馈控制模式




评论