 基于imu定位的方法,如何解决累积误差?
基于imu定位的方法,如何解决累积误差?
观点一
没人带就是容易跳这种坑,我之前就傻不拉吉地花了一周时间做纯imu定位。
做状态估计,首先要明确一点:任何算法都不能突破传感器本身的精度带来的限制。以下这张图片源自一篇关于imu的综述(侵删),
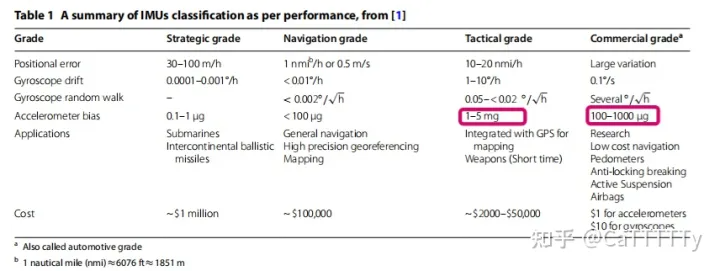
我标红的部分是文章错误,两个加速度bias位置放反了。
现在精度最好的imu一个小时会累积几十米的误差,价格上百万美元,用在洲际弹道导弹上的(你老板买得起?)。几万美元价位的imu,一分钟的位置误差计算下来大概是5米,注意是一分钟,由于加速度二次积分后,得到的位置与时间是二次关系,即位置误差随时间呈抛物线增长。
所以单纯用imu加速度计做定位是很不现实的,希望新入门的同学别再跳这种坑了。
观点二
基于IMU的定位(也就是我们通常称为的惯性导航)本质上属于航位推算定位,定位解算是基于运动积分的,之前定位结果中的定位误差会累积到当前定位结果中,同时由于IMU本身的零偏,最终表现就是定位误差会随时间累积。
因此在实际应用中,需要同时结合其他定位误差无累积的定位手段,如无线电导航(GPS、UWB等)或特征匹配定位(地形匹配、激光点云地图匹配等),来实时辅助进行惯导误差修正,才能一定程度上抑制误差积累,满足使用需求。
当然,如果确实没有其他传感器或定位手段可用,单独使用IMU定位的话,为避免误差过快累积,一方面,要对IMU做内参(零偏、刻度系数误差等)标定;另一方面,要结合具体应用平台和场景,考虑加入零速校正、零角度校正或运动约束等。
另外,仅仅用于航姿估计时,可以采用无人机领域常用的基于加速度和角速度输出的互补滤波方法,给出精确的俯仰角和横滚角。
观点三
我自己没有纯IMU的经验,但是可以分享下我知道的和我看到的看是否对题主有帮助。
1.买个非常贵的IMU: 最直接简单暴力的方法,航天工程和军用无人机里应该就是用了精度很高的IMU。而且据老板所说,有次SIGGRAPH还是什么会上有人演示过纯IMU的SLAM系统,效果杠杠的,不过很贵很贵就是了。
2.结合具体应用场景的约束: 可以参考下 https://drive.google.com/file/d/1tQyz5DGklJvOyFqdr9z3fKDWOti6A8sZ/view 系列工作。
根据后续改进这个工作的同学的反馈,他能够用IMU+LSTM的方式取得很好的结果,而且有意思的是用了LSTM的结果也只比step counting好一些。这说明在手持设备这种场景下匀速运动是个很强的先验约束,如果题主的应用场景存在这种强先验的话可以从这方面入手,而不是仅仅着眼IMU数据本身。
审核编辑 :李倩
-
传感器
+关注
关注
2554文章
51700浏览量
758544 -
算法
+关注
关注
23文章
4644浏览量
93670 -
定位
+关注
关注
5文章
1354浏览量
35598
原文标题:基于imu定位的方法,如何解决累积误差?
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
IMU中的misaligment误差是如何区分Axis to axis与Axis to frame误差的?
分析信号链中累积直流误差最详尽的方法
MSP430FR2311 中 UART 通讯的累积误差分析计算和时钟频率优选
基于MSP430F149单片机设计的室外移动机器人组合导航定位系统
IMU误差来源/表达式/标定
如何用不同的方法在信号中添加或累积误差?
IMU的工作原理是什么?怎样去搭建一种IMU误差模型?精选资料分享
如何利用工业级IMU减少正交误差的影响
全景图像镶嵌中累积误差的分析与减少方法研究

伪卫星定位线性化误差评估方法
一种基于单目视觉的误差检测方法
自动驾驶高精组合导航设备拆解-导远570D







 工商网监
工商网监
评论