 灵动微MM32SPIN360C电机开发板驱动有感BLDC的操作方法
灵动微MM32SPIN360C电机开发板驱动有感BLDC的操作方法
一、MM32SPIN360C 电机开发板介绍
简介
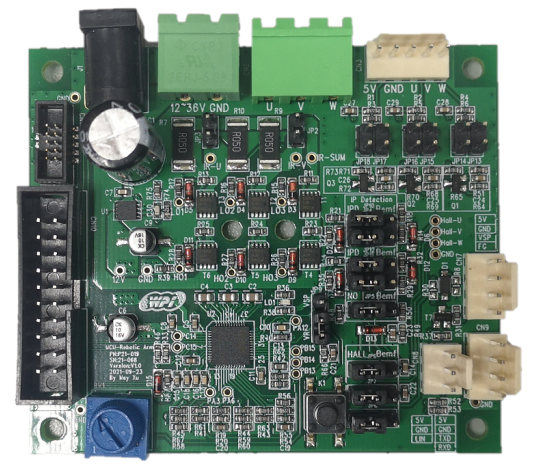
如图(1),MM32SPIN360C 电机开发板以 Mindmotion 的专用 MCU —— MM32SPIN360C 为主控制器,具备霍尔传感器检测和反电动势检测功能。适用于低压场合,可广泛用于工业或者民用领域的三相无刷永磁电机驱动器,如电动工具等。
主控制器 MM32SPIN360C 是 ARM Cortex-M0 的 32 位微控制器,内置 5V 输出的 LDO 稳压器(Input : 7~13.5V),内置 3 组具有自举二极管的 N 沟道半桥栅极驱动器(7~48V、1A Sink、1A Source),以及 3 个比较器和 3 个运算放大器等等。MM32SPIN360C 的具体参数和用法请参考灵动微的官网(https://www.mindmotion.com.cn/)上的数据手册和用户手册。

图(1)
电路板图解
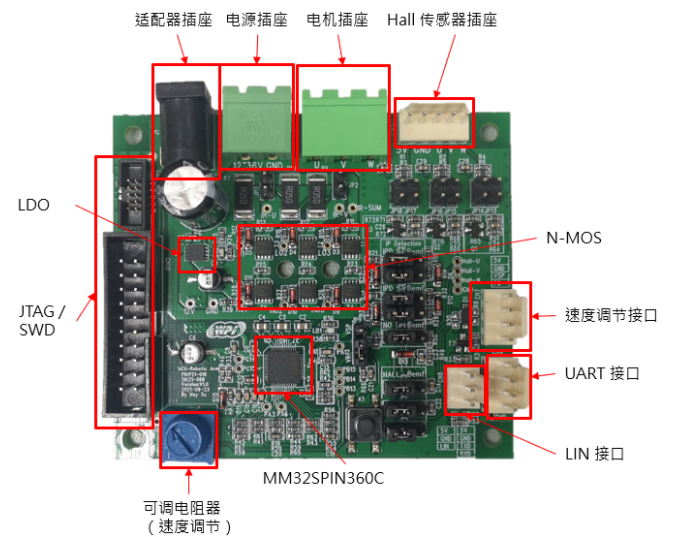
如图(2)为电路板正面的图解,开发板带有 10KΩ 可调电阻器,可用于调节电机的转速。带有 UART/LIN 通讯接口,以及两种形式的 JTAG/SWD 接口。电源输入电压为 12~36V,可以有两种接入方式(DC-JACK 或者 接线端子)。

图(2)
原理图介绍
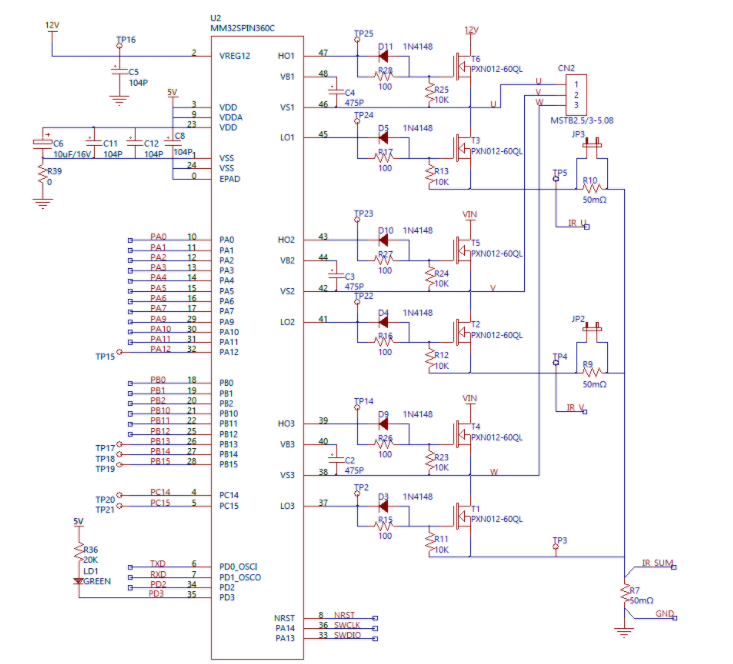
图(3)是电机驱动部分的原理图。由于 MM32SPIN360C 这颗 MCU 内自带预驱,所以可以直接驱动 MOS 管(PXN012-60QL),简化了电机驱动电路。

图(3)
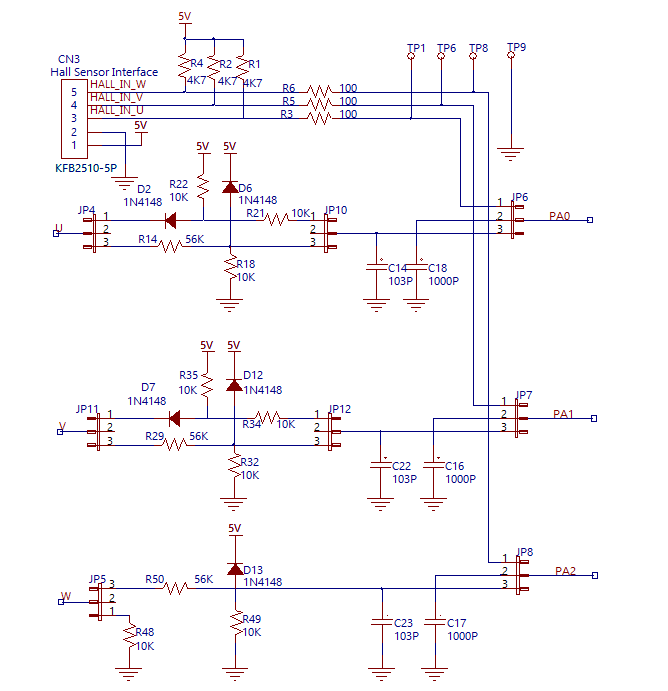
图(4)是反馈电路,可以通过 JP4~JP8,JP10~JP12 选择霍尔传感器方式反馈或者是反电动势方式反馈。如果选择霍尔传感器方式,则只需要将 JP6、JP7、JP8 的 1-2 脚短接。

图(4)
二、 驱动软件简介
启动电机
此驱动软件首先通过 12-bit ADC 采集可调电阻器的电阻值,确定电机的转速。当电机速度的 PWM 波形占空比大于 5% 才开始启动电机。电机启动之前通过读取 U/V/W 的 3 个霍尔传感器的值确定电机转子位置,进而根据转子位置来确定 U/V/W 的上电顺序。
//RM 旋钮启动与调速do {hwAdcValue = GetAdcAverage(5); // 采集可调变阻器的电压值if (0xffff == hwAdcValue) {break;} else {g_tMotor.tDuty = hwAdcValue * 100 / 4095; // 设置 PWM 占空比SET_DUTY_U(g_tMotor.tDuty);SET_DUTY_V(g_tMotor.tDuty);SET_DUTY_W(g_tMotor.tDuty);if ((g_tMotor.tDuty > 5) && (g_tMotor.tMotorState == STOP)) {g_tMotor.tMotorState = START; // 如果电机速度的波形占空比大于 5%,则启动电机}}} while(0);
霍尔传感器信号的采集
软件中包含 3 种霍尔传感器信号采集方式:主循环、EXTI、Timer 。
主循环 方式是在主函数的 while(1) 循环里读取 U/V/W 这 3 个霍尔传感器对应的 MCU 管脚(PA0/PA1/PA2)上的电平, 进而驱动换相。
EXTI 方式是设置 U/V/W 这 3 个霍尔传感器对应的 MCU 管脚(PA0/PA1/PA2)为外部中断,双边沿触发。当任一 HALL 线上电平发生变化时,都会有对应中断线产生中断,在 EXTI 中断服务函数中进行 HALL 引脚电平检测,进而驱动换相。
Timer 方式是设置 U/V/W 这 3 个霍尔传感器对应的 MCU 管脚(PA0/PA1/PA2)为定时器输入脚 ( CC1、CC2、CC3)。使用这 3 个定时器输入脚通过一个异或门连接到 TI1 输入通道;当捕获到 CC1、CC2、CC3 上有引脚发生电平变化时,由于异或门的存在, TI1 上产生一个跳变沿;经过输入滤波器和边沿检测器后传输给 TI1F_ED ,由于配置了 TIM 的触发源为 TI1F_ED 和使能了触发中断,这里会进入触发中断,在触发中断中我们可以判断霍尔状态的有效值,根据霍尔状态的有效值控制电机对应的绕组供电,进而驱动电机旋转。
这 3 种方式可以通过 hall.h 中的如下定义来选择:
#define HALL_POLLING_MODE 0 // 1:采用 主循环 方式采集霍尔信号
#define HALL_TIM_MODE 1 // 1:采用 Timer 方式采集霍尔信号
#define HALL_EXTI_MODE 0 // 1:采用 EXTI 方式采集霍尔信号
电机堵转检测
驱动软件中开启了系统节拍定时器(systick),每 1 毫秒中断一次。此定时器用于检测电机运转时堵转 2 秒之后,停止电机运行。
void Systick_Callback(void){if(RUN == g_tMotor.tMotorState) {g_tMotor.tCount.hwTimeCount ++;if(g_tMotor.tCount.hwTimeCount > 2000) { // 2s超时,电机卡住不运转超过2s时间GATE_DRIVER_DISABLE();BLDC_UVW_DISABLE();g_tMotor.tMotorState = STOP;g_tMotor.tMotorErr = LOCKED_ERR;g_tMotor.tCount.hwTimeCount = 0;}}}
三、调试开发板
接线方法
开发板、BLDC 电机、调试器的接线图如图(8)所示。
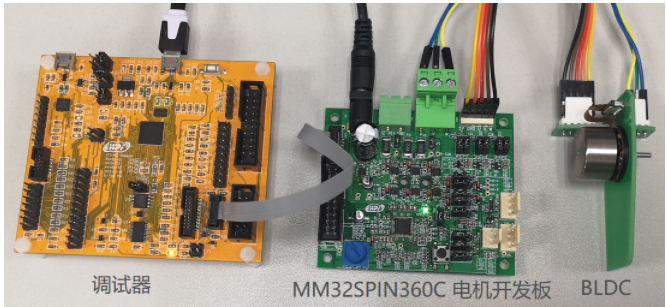

图(8)
调试器的设置
开发板采用 SWD 接口调试。调试器可以采用灵动微官方的调试下载器,也可以采用适用于 ARM Cortex-M 核的调试器,比如图(8)用的就是 WPI 自制的调试器。
如果使用灵动微官方的调试器,则需要从灵动微官网上下载调试器的驱动(https://www.mindmotion.com.cn/support/development_tools/debug_and_programming_tools/)。 并在 keil 的调试设置中,选择 MM32-LINK Debugger ,如图(9)所示。

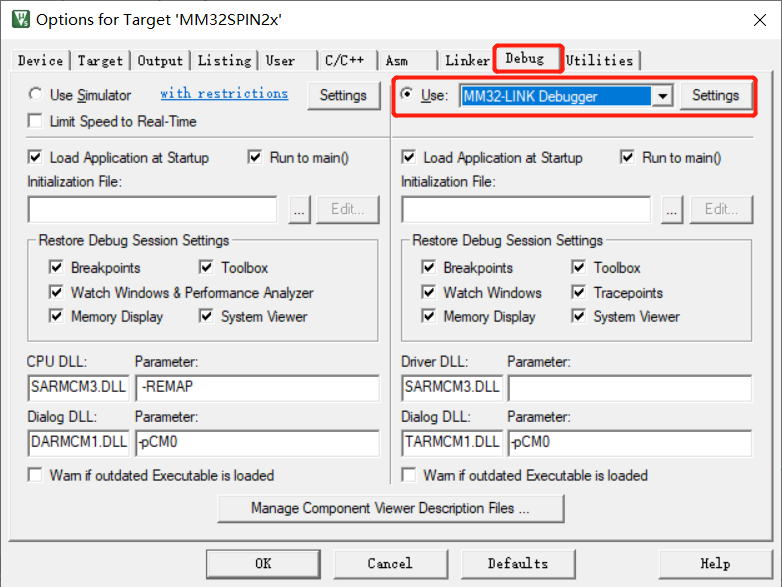
图(9)
我这里使用的是 WPI 自制的调试器,这种调试器免驱,在 keil 的调试设置中,选择 CMSIS-DAP Debugger ,如图(10)所示。
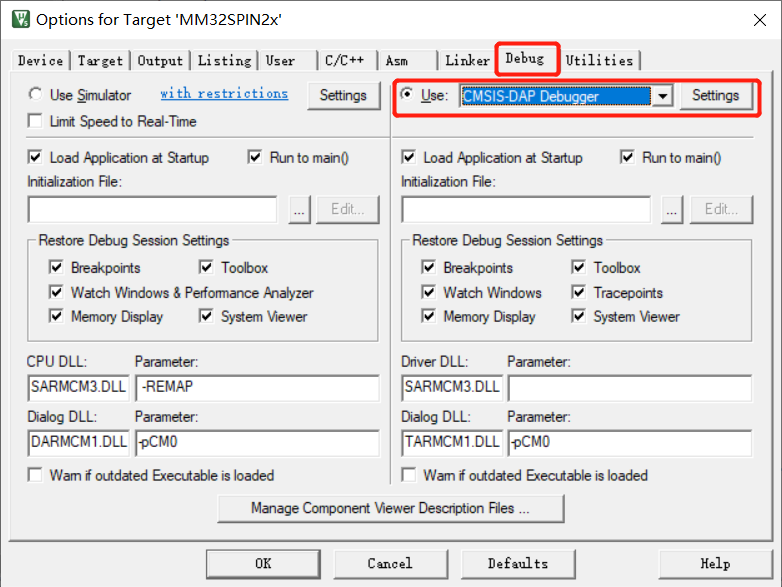

图(10)
开发板上的设置
开发板上的跳线设置如图(11)所示,红色标记的地方需要接跳线帽,其他位置可以忽略。

图(11)
代码下载 & 运行
将代码下载到开发板上之后,旋转可调电阻器的旋钮,电机启动。可调变阻器的阻值越大,电机的转速越高。
四、总结
MM32SPIN360C 电机开发板上的主控制器(MM32SPIN360C)内置预驱,所以 MCU 只需要外接 6 个 MOS 管就可以驱动 BLDC 电机,整个驱动电路比较简单。
本文档介绍了如何使用 MM32SPIN360C 电机应用开发板驱动低压有感BLDC 电机的方法。 由于有霍尔传感器反馈电机转子的位置,所以在电机启动和运行的过程比较平稳,而且不需要算法,驱动代码比较简单。
此外,此开发板也可以驱动有感/无感正弦波电机,这个驱动的方法将在后面的博文中介绍,敬请期待。
-
单片机
+关注
关注
6036文章
44557浏览量
635111 -
电机控制
+关注
关注
3534文章
1877浏览量
268794 -
无刷电机
+关注
关注
57文章
843浏览量
45836 -
灵动微
+关注
关注
4文章
174浏览量
22668 -
MM32
+关注
关注
1文章
106浏览量
761
发布评论请先 登录
相关推荐
基于灵动MM32SPIN560C的低压无刷电机应用方案
灵动微MM32SPIN560C的低压无刷电机应用方案
2019灵动微电子MM32 MCU智能之“芯”咖啡沙龙展示方案(一)——基于MM32SPIN360C的手持式吸尘器
灵动微课堂 (第113讲) | 基于MM32 MCU防疫产品应用解决方案分享 —— 便携冰箱
关于电机控制专用国产32位单片机MM32SPIN360C
灵动微MM32SPIN25PF产品的特性介绍
灵动微MM32SPIN360C获选2020年度国产MCU评选

32位单片机MM32SPIN360C现货供应
灵动微电动工具专用单片机MM32SPIN360C
基于MM32SPIN360C芯片的低压无刷电机设计
博文 | 基于灵动微 MM32SPIN560C 电机调试的方法

方案 | 世平基于灵动微 SPIN560C 的低压无刷电机应用方案
昂科烧录器支持MindMotion灵动微电子的32位微控制器MM32SPIN360C






 工商网监
工商网监
评论