 工业以太网时代,该如何选择总线运动控制器?
工业以太网时代,该如何选择总线运动控制器?
小伙伴们如果想了解更深入的解释(确保我们没有忽悠你),请继续往下看吧。
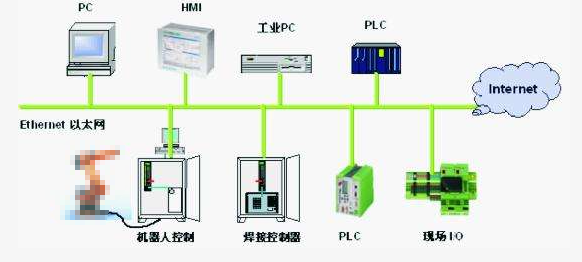
EtherCAT是EtherCAT基金会基于以太网基础开发的一种开放式的、先进的现场总线,它通过一系列独特的机制来保证数据传输的高效与可靠。EtherCAT只需要使用一根百兆网线就可以实现数据的传输,常见拓扑如下(菊花链),主站(控制器)接第一个从站(电机,IO模块等),第一个从站接第二个从站, 一直接到第N个(当然EtherCAT也支持其他拓扑)。虽然大家只看到一根网线串了下去,但百兆网线里其实包含4根线,其中两根是用来做输出数据(TX),两根是用来返回数据(RX),所以其实内部是组成了一个环网,如下图。
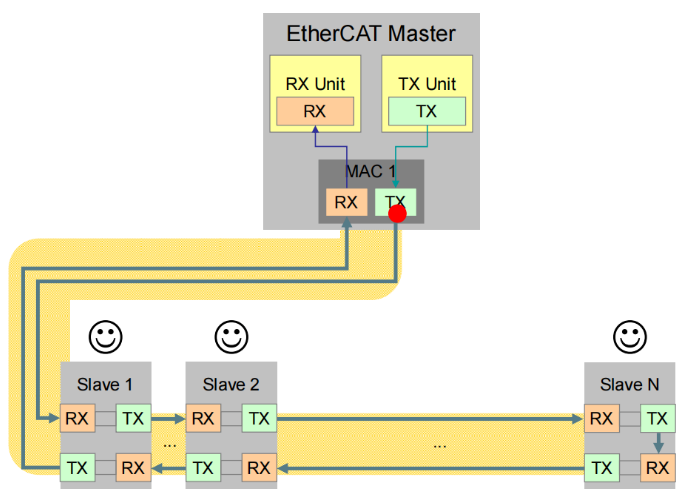
EtherCAT主站需要使用实时操作系统 + 标准的以太网芯片 + EtherCAT协议栈,从站则需要使用专门的通信芯片(ESC)来保证通信的高速和稳定。
所以,虽说它们对外的接口都是网口(RJ45接口),但EtherCAT和EtherNET在硬件层面是有很大不同的,不仅仅是数据层的不同哦。EtherCAT正式工作的期间(PDO通信),只有一个数据帧在主站和从站之间高速传输,经过每个从站时,每个从站取下自己需要的数据(命令位置,控制字等),塞入自己需要上报的数据(反馈位置,电机状态等),就像一列高速的列车经过每个车站都要上客下客一样。
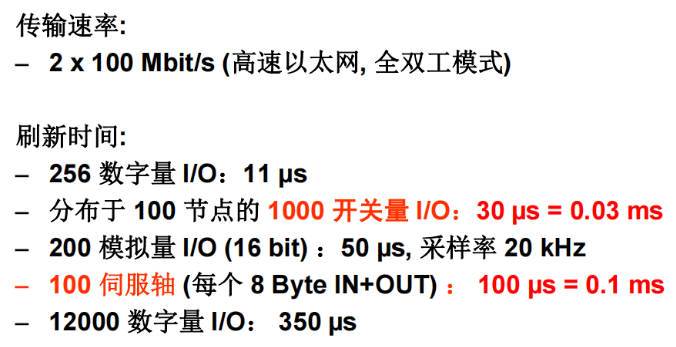
但比高铁更快的是,EtherCAT通过专用芯片(ESC)实现在飞行中处理数据(process on the fly),而不用等到完全收到数据后再处理,再发送。所以可以实现高速的数据交换,让我们看看官方给的这组让人震惊的数据吧。
前面提到了,EtherCAT从站芯片(ESC)有分布式时钟,这个到底是什么东西呢?我们接着往下看。
现场总线一般都是串行通信,到达各个从站肯定是有时差的,高铁再快,也不能同时到达上海和昆山。
那么EtherCAT怎么保证从站统一行动,而没有掉队呢?答案就是分布式时钟。
EtherCAT主站会挑选第一个带时钟(DC)功能的从站作为时钟主站(DC Master),各从站按照时钟主站的时间统一步调。这样,如果多个电机做多轴插补的时候,就可以参考精准的时钟信号统一时间采样(采集命令数据),统一时间动作,就像这样:
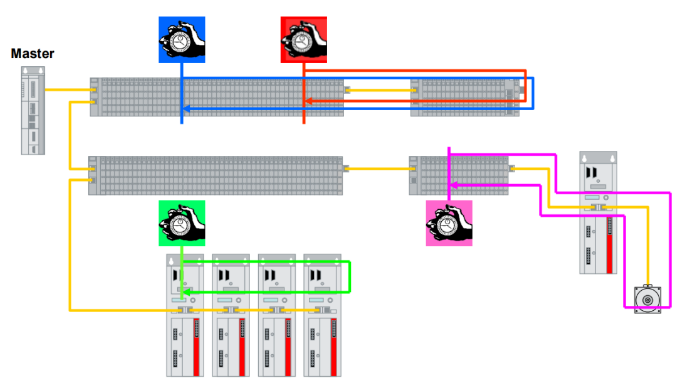
每个从站都有一个自己的手表,像不像香港警匪片,长官说:现在对表,晚上8:50一起行动(说的时候表情一定要严肃)。当然,EtherCAT的时钟(DC)对表可不是靠手拨的(是因为忘了设计拨钮了?), EtherCAT是通过复杂的机制计算各个从站之间的时钟误差,实时修正,保证各从站时间保持非常小的误差(远小于1us,官方测试数据约20ns)。
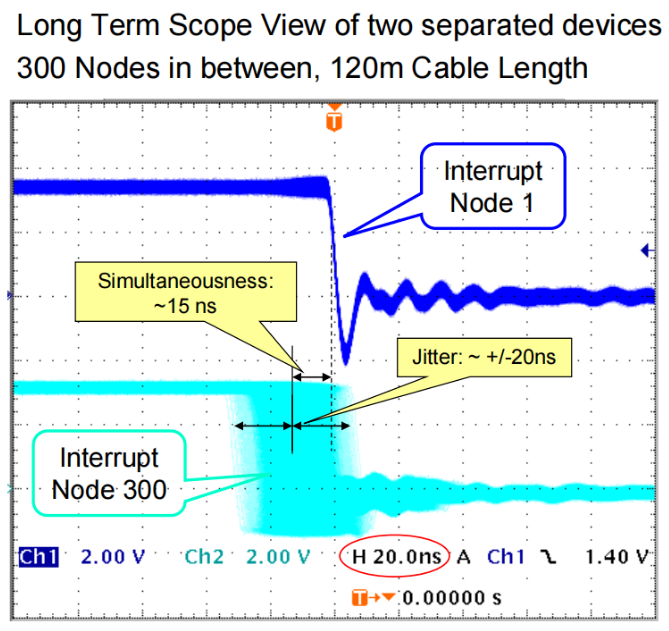
(有图有真相了吧,这次相信了吧)
再回到最初的问题,和脉冲电机对比的问题,脉冲驱动虽然在同一时间收到了数据,但因为驱动之间没有办法统一协调时钟信号,所以从理论上肯定是不如EtherCAT的。当然,实际上大部分应用都制约在电机调试性能上,所以小伙伴们的感受并不明显,和脉冲对比也是,和某千兆总线对比也是。但EtherCAT在底层已经为精准同步打好了基础。(有的小伙伴可能说,别吹牛了,我都知道EtherCAT的下一代标准就是EtherCAT G,也是千兆总线,说明还是千兆更好。事实是EtherCAT G的设计并不是为了提高同步性的(目前已经很好了),那它的意义是什么,将会在下一期中详细介绍)。
除了以上的优势,EtherCAT还有很多其他优势,包括接线简单,排查干扰方便,没有丢脉冲的烦恼,传输数据丰富(例如绝对值数据,力矩状态)等。
最后,当然还是要为我们的正运动控制器做下广告,正运动在国产控制器中最早支持EtherCAT,目前支持的从站最多,兼容性最好。
一、ZMC408CE产品亮点
1.高性能处理器,提升运算速度、响应时间和扫描周期等;
2.一维/二维/三维、多通道视觉飞拍,高速高精;
3.位置同步输出PSO,连续轨迹加工中对精密点胶胶量控制和激光能量控制等;
4.多轴同步控制,多坐标系独立控制等;
5.EtherCAT同步周期可快至125us;
6.EtherCAT总线和脉冲轴混合插补;
7.直线插补、任意空间圆弧插补、螺旋插补、样条插补等;
8.应用灵活,可PC上位机开发,也可脱机独立运行;
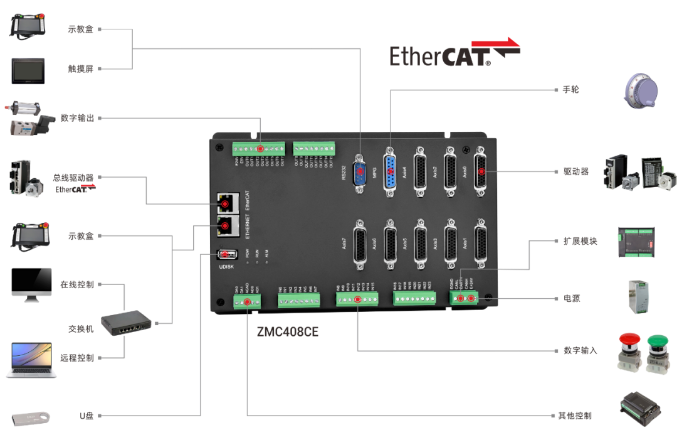
二、ZMC408CE产品简介
ZMC408CE是正运动技术推出的一款高性能EtherCAT总线运动控制器,核心技术采用了先进的FPGA技术,实现硬件位置比较输出、精准输出功能,保证连续轨迹加工的出色性能和稳定性,以及动态数据捕获的实时性,从而实现更加精准控制和提高生产效率和品质。
ZMC408CE支持EtherCAT + 脉冲轴混合插补,可脱机或联机运行,轴数8-32轴可选,支持ZDevelop + 多种高级上位机混合编程,可以实现点位运动、电子凸轮、直线插补、圆弧插补、连续轨迹加工和30+种机器人模型的控制。
轴数8-32轴可选;
板载EtherCAT,CAN,RS232,RS485,EtherNet,U盘接口;
板载24DI,其中4路高速色标锁存;
板载16DO,其中8路硬件比较输出PSO,8路高速PWM;
专用的手轮输入接口。
三、控制器多维多通道PSO应用
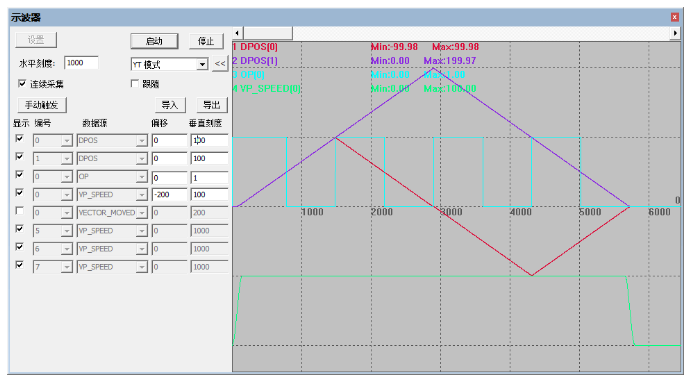
1.二维PSO输出示意图
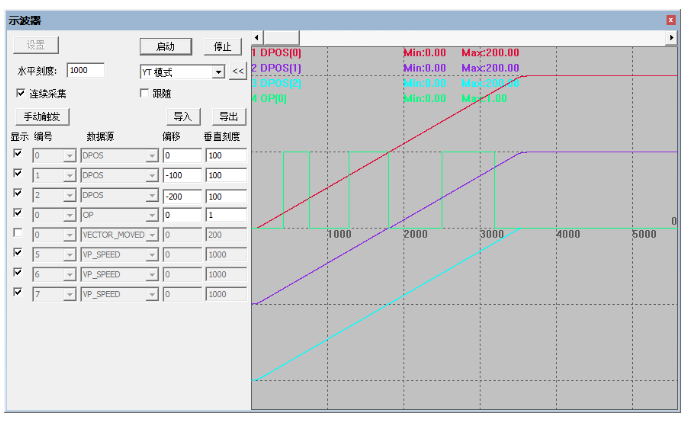
2.三维PSO输出示意图
四、控制器支持多种开发方式
支持PLC、Basic、HMI组态三种编程方式。PC上位机API编程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。
五、ZMC408CE应用场景
适用于3C电子、半导体、新能源、光伏、汽车、医疗、点胶设备、流水线等领域的大型加工、装配生产线上。
本次,正运动技术工业以太网时代,该如何选择总线运动控制器?就分享到这里。
审核编辑:汤梓红
-
运动控制器
+关注
关注
2文章
401浏览量
24704 -
工业以太网
+关注
关注
10文章
619浏览量
42333 -
ethercat
+关注
关注
18文章
686浏览量
38673
发布评论请先 登录
相关推荐
以太网、现场总线、串行通信和工业无线通信的四种通信方式

使用C2000 EtherCAT从站控制器的SMI进行以太网PHY配置

现场总线和工业以太网有什么区别
什么是工业以太网?有何特点?
工业以太网和普通以太网区别在哪

工业以太网与工业现场总线的区别
工业以太网的基本原理及优势
工业以太网的基本原理及优势





 工商网监
工商网监
评论