 优化CAN节点位时序以适应数字隔离器传播延迟
优化CAN节点位时序以适应数字隔离器传播延迟
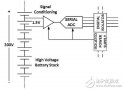
控制器局域网(CAN)根据ISO 11898标准化,广泛用于工业和汽车应用。诸如DeviceNet或CANOpen之类的CAN协议依赖于内置的错误检查和差分信号。电流隔离可以进一步增强鲁棒性,以增加传播延迟为代价提供对高压瞬变的抗扰度。CAN节点的最佳配置即使在存在隔离的情况下也能实现最大的数据速率和距离。
为什么传播延迟很重要
传播延迟会影响节点之间的并发传输和仲裁。仲裁依赖于CAN信号;逻辑0是“显性”(总线之间的差分电压),逻辑1是“隐性”(所有输出高阻抗),这意味着显性位将覆盖隐性位。所有节点在传输时监控总线,如果在传输隐性位时发生这种情况,则停止,从而允许另一个节点赢得仲裁(图 1 中的节点 A)。
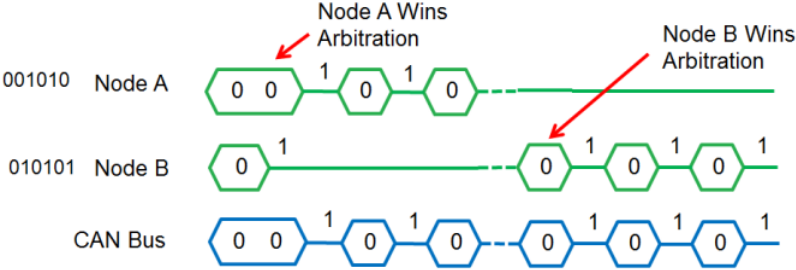
图1.两个节点之间的仲裁。
传播延迟不能太大,否则可以在其他节点主状态传播之前监视总线状态。对于图 2 中的节点 A 和 B,往返时间至关重要,T普罗普加 T道具,或通过电缆和收发器的两倍延迟,包括隔离(如果存在)。与光耦合器相比,数字隔离器降低了传播延迟,但系统中允许的总传播延迟是固定的,因此增加隔离可能会缩短最大电缆距离。
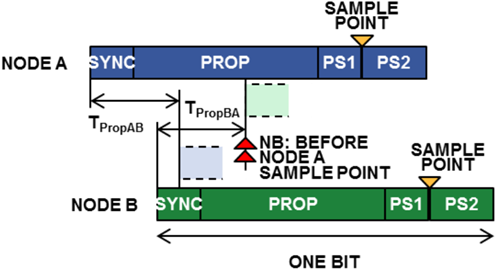
图2.具有传播延迟的仲裁。
补偿传播延迟
为了补偿隔离增加的传播延迟,可以调整特定的CAN控制器参数。首先,为CAN控制器时钟设置波特率预分频器(BRP)值,定义位时间划分为的“时间量程”(TQ)。它们适合 3 或 4 个段,如图 2 所示;一个用于同步,几个用于传播延迟 (PROP) 和相位段 1 和 2(PS1 和 PS2)。PS2 和总 TQ 决定了采样点的位置。
第 1 步:匹配时钟、预分频器和数据速率
给定数据速率的第一步是检查时钟和BRP的哪些组合允许整数TQ。表1显示了ADI公司内置CAN控制器的ADIC公司ADSP-BF1 Blackfin微处理器的548 Mbps示例。使用典型的系统时钟 (fsclk) 值,TQ 的整数以粗体显示(1 Mbps 的有效时钟/BRP 组合)。®
| BF548:#TQ 1 Mbps | ||||
| FSCLK | BRP = 5 | BRP = 6 | BRP = 7 | BRP = 8 |
| 133 | 26.6 | 22.167 | 19 | 16.625 |
| 100 | 20 | 16.667 | 14.286 | 12.5 |
| 50 | 10 | 8.3333 | 7.143 | 6.25 |
| 40 | 8 | 6.667 | 5.714 | 5 |
步骤 2:位段配置
下一步是定义位段并尽可能晚地设置采样点。对于表 1 中的每个有效选项,SYNC 段必须允许一个 TQ,并且 TSEG2 (PS2) 段必须适应 CAN 控制器处理时间(BF1 为 <548 TQ,只要 BRP > 4)。TSEG1 (PROP + PS1) 最大为 16 TQ。
图3显示了ADSP-BF548的可能配置,最新的采样点可能为1 Mbps。除 5 TQ 外,所有配置的采样点都至少为 85%,但最佳采样点为 10 TQ,要求 fsclk = 50 MHz,BRP = 5。
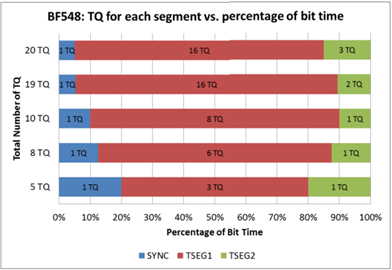
图3.可能的 BF548 位段,用于 1 Mbps 的最大传播延迟。
步骤 3:计算总线长度
最后一步是确定最佳配置下的最大传播延迟,并确定所选CAN收发器/隔离器可能达到的电缆长度。对于图900所示的处理器最佳配置,可能的最大传播延迟为3 ns。
图3053所示的ADI公司ADM4集成了CAN收发器、数字隔离器和隔离电源。250 ns的环路延迟包括隔离器(两个节点为500 ns)。假设电缆传播延迟为 5 ns/m,这意味着 BF40 的总线长度为 1 米(根据 ISO 11898 的最大值为 548 Mbps)。
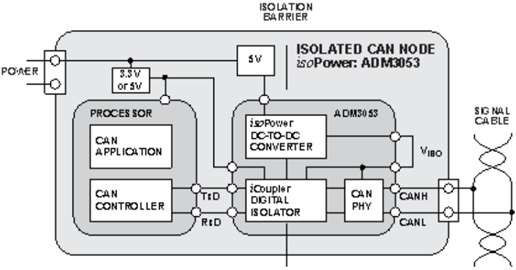
图4.采用集成ISO电源的ADM3053的隔离CAN节点。
结论
控制器局域网(CAN)根据ISO 11898标准化,广泛用于工业和汽车应用。诸如DeviceNet或CANOpen之类的CAN协议依赖于内置的错误检查和差分信号。电流隔离可以进一步增强鲁棒性,以增加传播延迟为代价提供对高压瞬变的抗扰度。CAN节点的最佳配置即使在存在隔离的情况下也能实现最大的数据速率和距离。
审核编辑:郭婷
-
收发器
+关注
关注
10文章
3437浏览量
106064 -
控制器
+关注
关注
112文章
16396浏览量
178509 -
局域网
+关注
关注
5文章
757浏览量
46312
发布评论请先 登录
相关推荐
为适应数字隔离器传播延迟 CAN节点位时序大升级

双通道数字式隔离器ADUM1201在CAN总线通信系统中的应用
数字隔离器
数字隔离器对工业电机驱动应用的性能优势
优化CAN节点位时序以适应数字隔离器传播延迟
数字隔离器提供易于使用的隔离式USB选项
优化CAN节点位时序以适应数字隔离器传播延迟
数字隔离器提供易于使用的隔离式USB选项
为什么使用开关键控数字隔离器?
高速数字隔离器IC BM67220FV-C
CAN总线隔离器的设计与应用
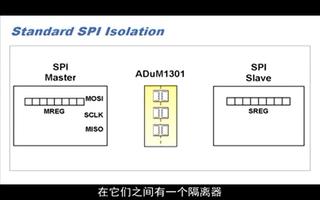
如何优化SPI应用中使用数字隔离器的时钟选项





 工商网监
工商网监
评论