 3D视觉,如何快速接点「私活」?
3D视觉,如何快速接点「私活」?
在工坊平台,常常会有企业老板联系我们,希望工坊能够快速帮忙对接相应人才,以帮忙解决项目中棘手的难题,比如机械臂抓取、相机标定、缺陷检测、点云后处理、三维处理、 TOF标定、SLAM方案咨询等;同时,也有星球成员私下联系我们,希望工坊能够帮忙对接一些企业项目,可以在业余时间接点活儿。 这里,我们总结了一些星球成员已有的项目技能,如各位企业主有相关项目需求,可以联系我们小助理,由小助理帮忙快速精准对接。
项目技能一:3D机械臂抓取
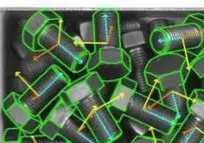
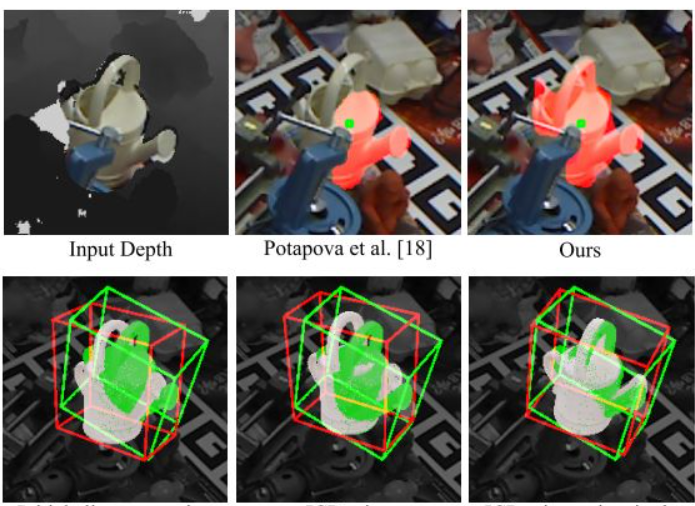
1.深度相机(双目视觉,ToF,结构光等)下的物体位姿估计(可基于halcon,PCL,open3d等软件或者库)
2.机械臂结合深度相机完成抓取,采集,堆叠,拆垛等项目 (可基于 ROS 或者直接 TCP/IP 通信)

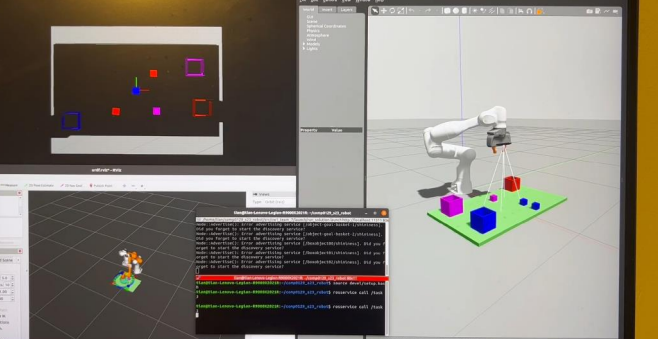
3.采用ROS完成机械臂gazebo场景仿真环境搭建
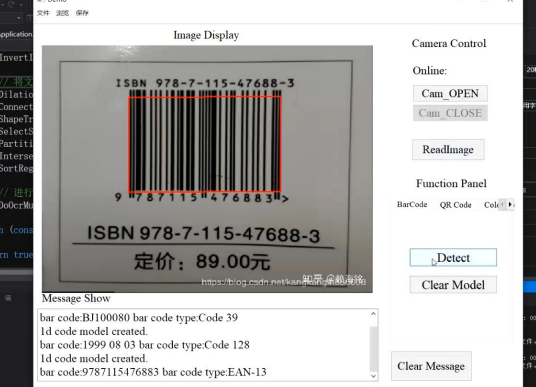
4. 基于Halcon的工件缺陷检测,OCR识别,一维码二维码检测等。
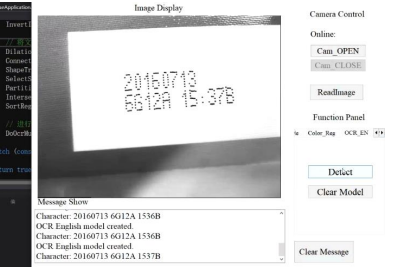
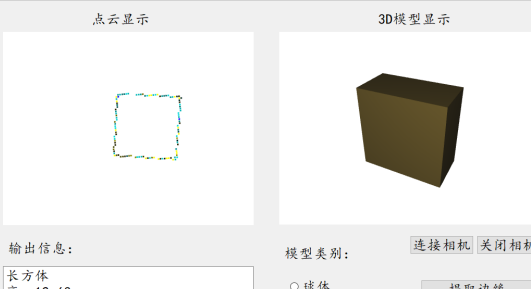
5.搭建基于点云显示的Qt界面或者Opengl界面搭建
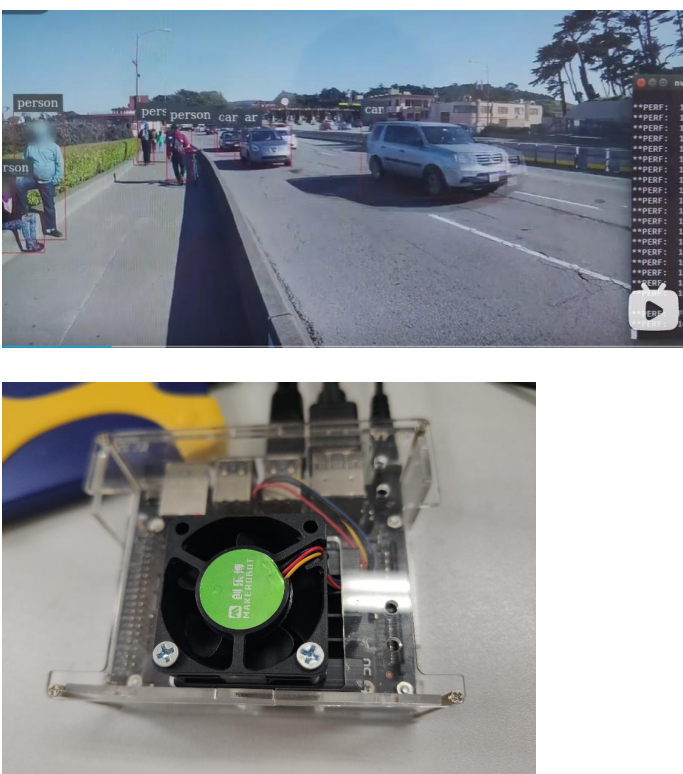
6. 基于CUDA 进行数据加速计算,量化和 jeston 系列设备进行深度神经网络部署。
项目技能二:缺陷检测
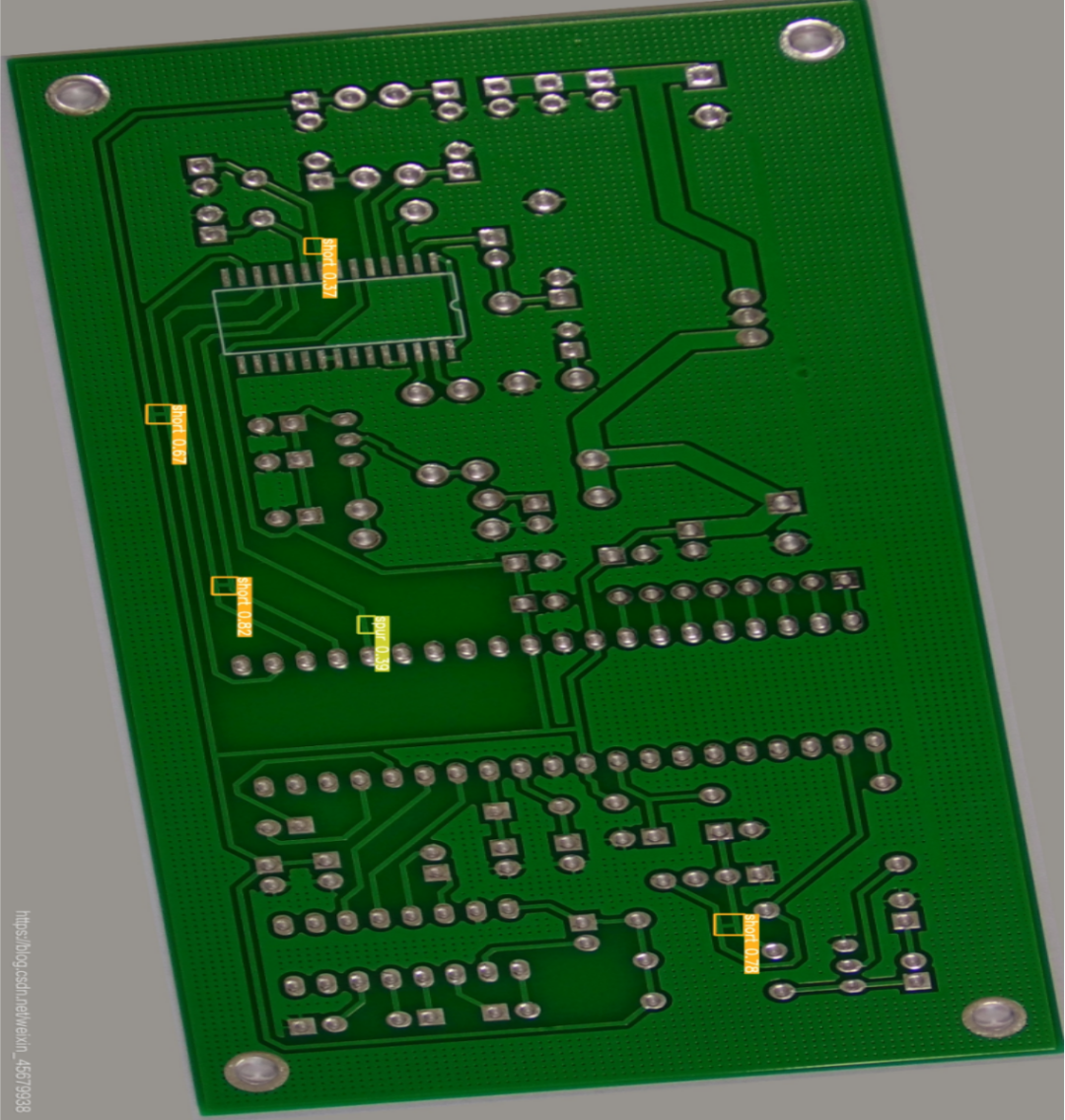
2.1 AOI外观缺陷检测
(1)可解决小目标缺陷(5个像素以上) (2)推理速度快
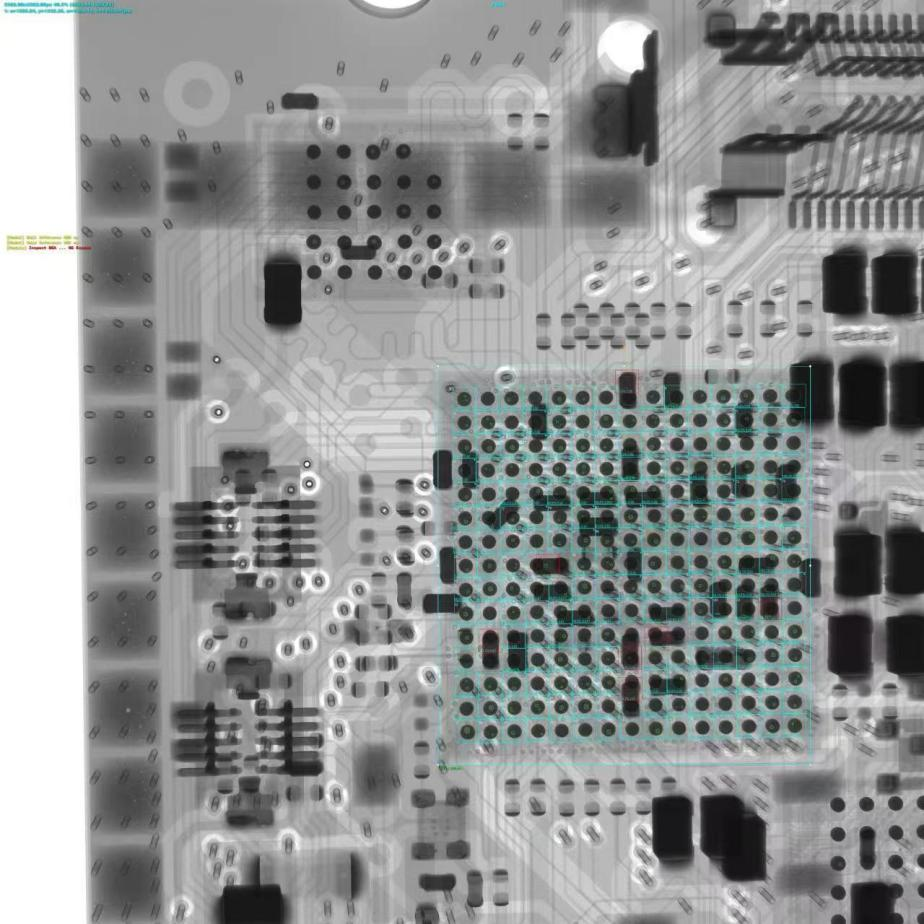
2.2X光内部探伤
(1)缺陷模糊
2.3.自然场景尺寸测量(测量轨道缝隙)
(1)场景复杂多变

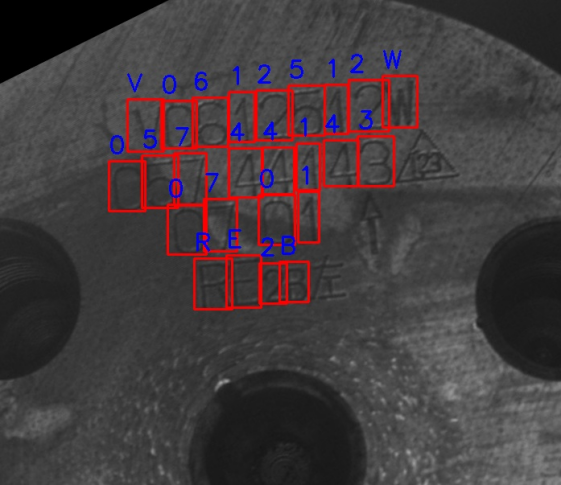
2.4工业负责场景OCR
(1)环境恶劣
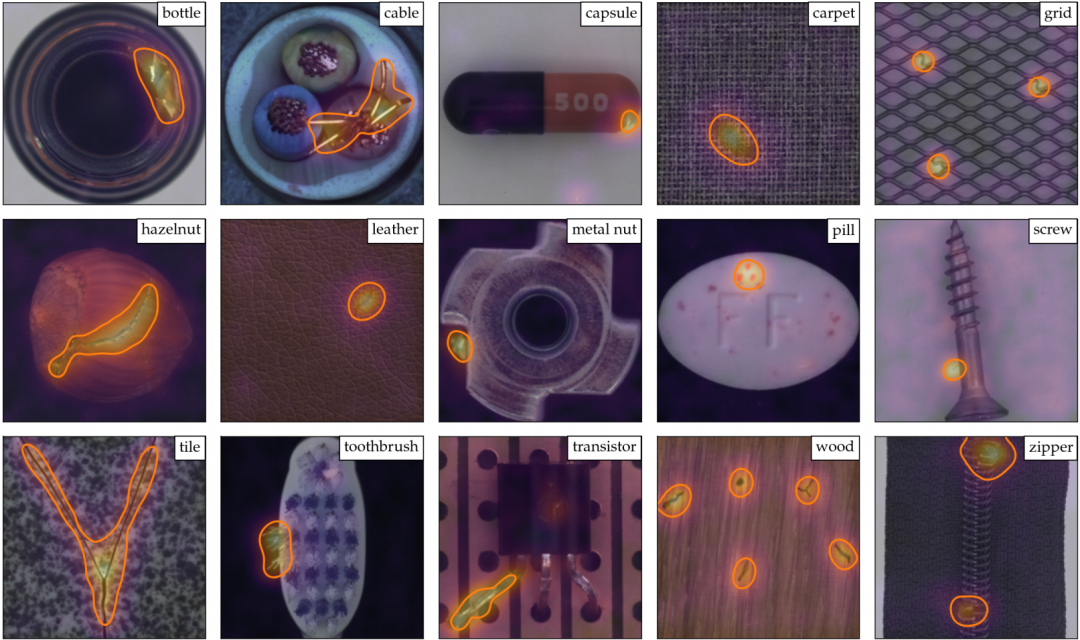
2.5 无监督异常检测
(1)无需标注训练缺陷
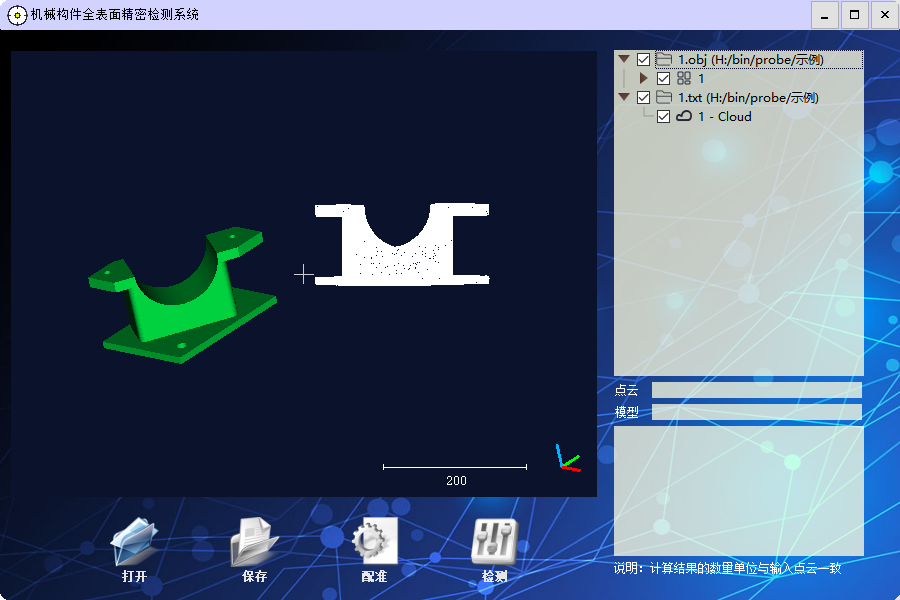
项目技能三:三维点云
3.1 不同量级和方案的点云处理平台搭建
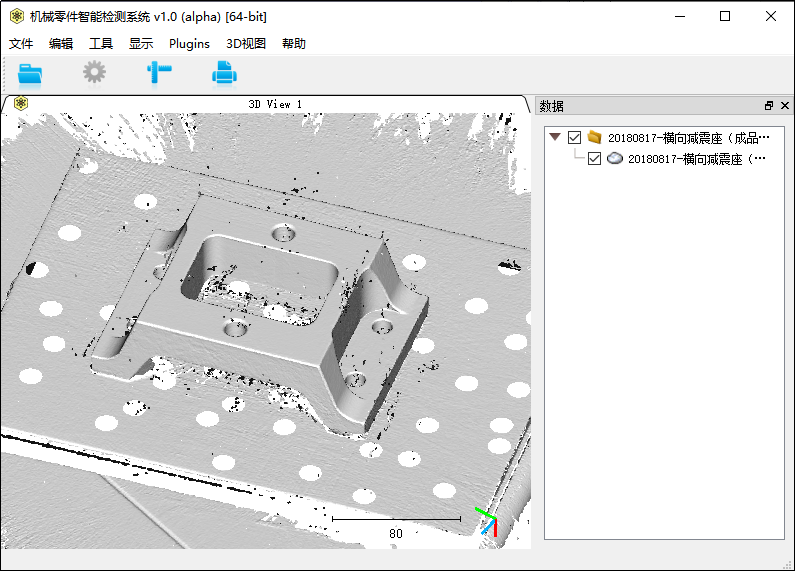
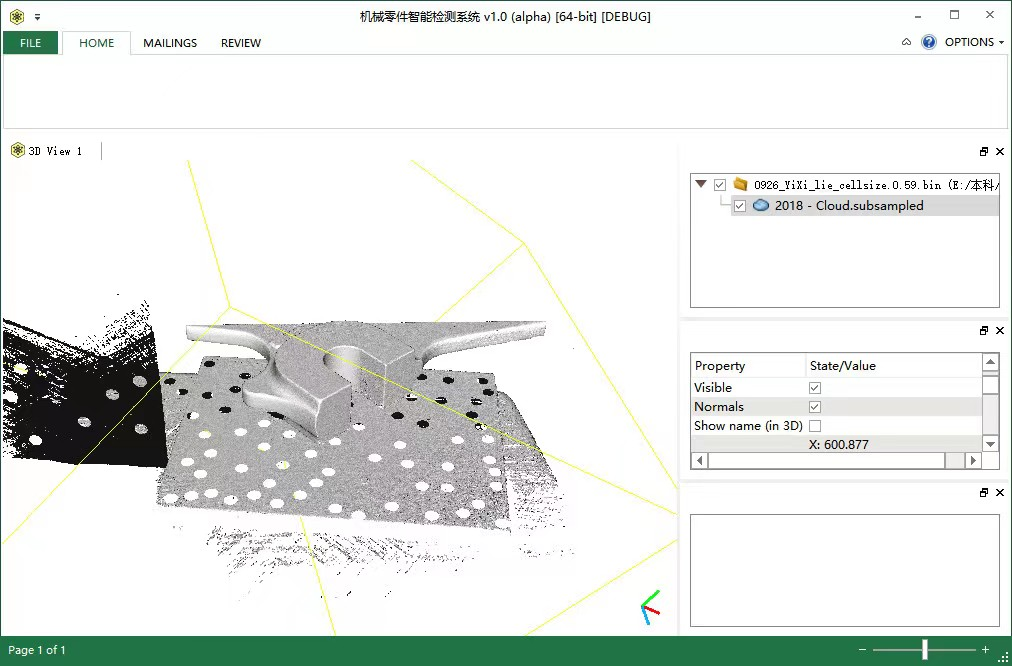
3.2 各种点云算法的实现-传统的
项目技能四:结构光
1、可实现单目+投影仪(格雷码)标定。 2、结构光相机硬件设计、搭建
3、单目结构光相机标定+重建
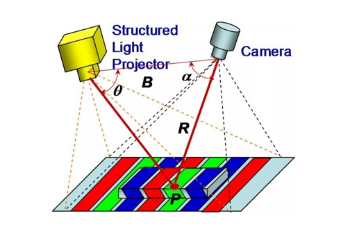
4、双目结构光相机标定+重建
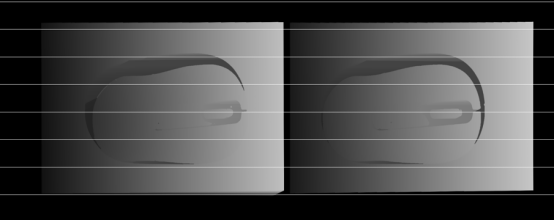
5、重建误差校正

6、结构光相关课题的毕业论文指导
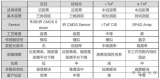
项目技能五:相机标定(针孔、鱼眼、全景、单/双/阵列)
可实现高精度相机标定。最后如果你在某一个领域能够独挡一面,且已具备丰富的项目实战经验,比如:SLAM、自动驾驶、TOF标定、多传感器标定实战经验等,欢迎联系我们,我们将力所能及为你向企业推荐,以解决企业找人难的困局,以此同时,你也将实现知识变现。 审核编辑 :李倩
-
传感器
+关注
关注
2551文章
51163浏览量
754159 -
机械臂
+关注
关注
12文章
515浏览量
24609 -
3D视觉
+关注
关注
4文章
433浏览量
27531
原文标题:3D视觉,如何快速接点「私活」?
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
采用DLP技术的3D机器视觉参考设计包括BOM
嵌入式3D视觉功能相关资料推荐

探讨关于3D视觉技术和3D传感器
一文带你看懂3D视觉
3D视觉主要技术路径 3D结构光技术原理
关于3D机器视觉的几个技术趋势
智造之眼®深入3D视觉应用

3D视觉的三大优势





 工商网监
工商网监
评论