 KUKA机器人中阵列的概念解析
KUKA机器人中阵列的概念解析

阵列
术语“阵列“指的是相同数据类型对象的组合产生的一个数据对象;通过下标可以寻址阵列中的独立的元素。声明如下
DECL INT OTTO[7]
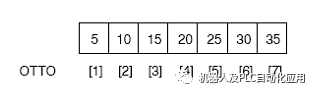
您可以存储,例如,7个不同的整数在阵列OTTO[]中。通过指定相关的下标(第一个下标永远是数字1),您可以访问阵列中每个单独的元素。
OTTO[1]=5: 数字5分配给第一个元素
OTTO[2]=10: 数字10分配给第二个元素
OTTO[3]=15: 数字15分配给第三个元素
OTTO[4]=20: 数字20分配给第四个元素
OTTO[5]=25: 数字25分配给第五个元素
OTTO[6]=30: 数字30分配给第六个元素
OTTO[7]=35: 数字35分配给第七个元素
可以将阵列OTTO[]想象为一个包含7个间隔的架子。根据以上的分配,填充元素如下:一维阵列的表示
如果阵列中的所有元素都初始化为同一个数字,例如0,您不必要编程每个分配,可以使用循环和一个计数变量 “自动”分配。
FOR I=1 TO 7
OTTO[I]=0
ENDFOR
该情况下,计数变量为整数型变量I,该变量在作为整数使用前必须声明。
阵列可能是任何数据类型。单独的元素也可能有复杂的数据类型(例如,阵列组成的阵列)。
●仅整数型数据类型允许作为下标。
●除常量和变量外,算术表达式也允许作为下标。
●下标起始值通常为1。
2维阵列
除已经讨论过的一维阵列,也就是说仅有一个下标,在KRL中还可以使用两维或三维阵列。采用
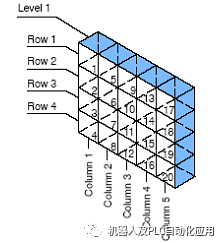
DECL REAL MATRIX[7,3]
您可以声明一个两维5×4的阵列,包含5×4=20个实数元素。可以表达该阵列为5列和4行的矩阵。程序顺序如下
I[3]=0
FOR COLUMN=1 TO 7
FOR ROW=1 TO 3
I[3]=I[3]+1
MATRIX[COLUMN,ROW]=I[3]
ENDFOR
ENDFOR
根据元素在矩阵中的顺序分配值。得到下列矩阵分配:
3维阵列
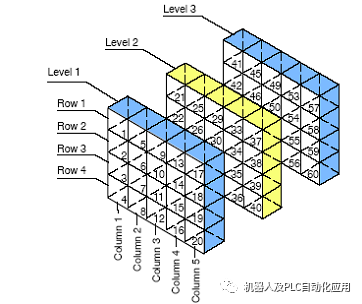
三维阵列可以看作是一个接一个的一些两维矩阵。第三维指示矩阵所处位置的级别。一个三维阵列可简单地声明为一维或两维阵列,例如:
DECL BOOL ARRAY_3D[5,3,4]
初始化顺序如下:
FOR LEVEL=1 TO 3
FOR COLUMN=1 TO 5
FOR ROW=1 TO 4
ARRAY_3D[LEVEL,COLUMN,ROW]=FALSE
ENDFOR
ENDFOR
ENDFOR
三维阵列的表示
审核编辑:刘清
-
KUKA机器人
+关注
关注
4文章
144浏览量
10107
原文标题:KUKA机器人中阵列的概念
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
伺服电动缸在人形机器人中的应用
KUKA机器人问题解答
现代机器人中有什么传感器?
KUKA库卡机器人伺服驱动器相关型号举例
KUKA焊接机器人伺服电机常见故障及维修处理
工业机器人中面对的控制问题是什么
库卡机器人MGV电源模块维修
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
KUKA机器人中阵列的概念计算

KUKA机器人中-TCP通讯数据传输




评论