 FANUC机器人指令编辑(变更编号、取消、改为备注)
FANUC机器人指令编辑(变更编号、取消、改为备注)
程序编辑界面,在编辑(EDCMD)中有一系列的功能选项,本文重点对“变更编号”、“取消”及“改为备注”三个功能做详细介绍。
1.变更编号(Renumber)该选项的功能作用是:以升序方式,从光标所在行起,自上而下赋予程序中位置变量新的位置编号,使程序中的位置编号更加整齐。
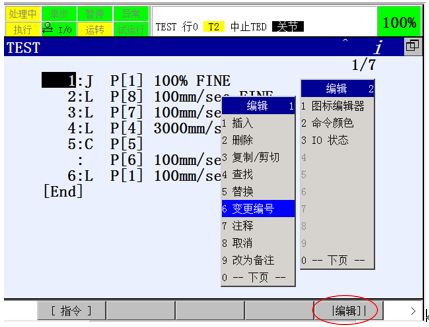
图1
示教编程中,由于经常需要对示教位置点执行插入或删除操作,位置编号在程序中会变得零乱无序(如图2)。
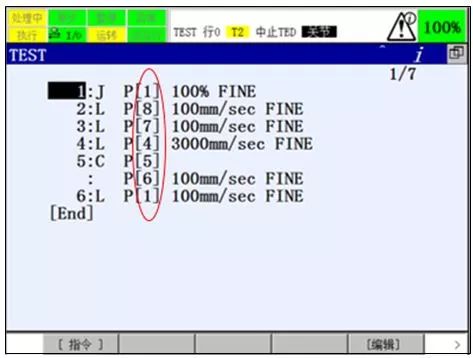
图2
通过变更编号功能,可使位置编号在程序中依序排列(如图3)。
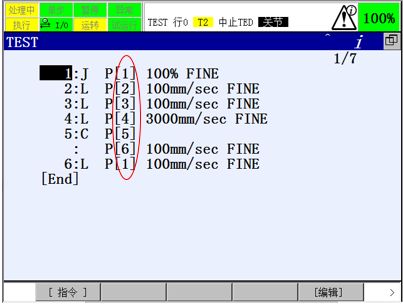
图3
注意: 1、变更编号功能仅对编号顺序进行调整,不改变原程序轨迹。 2、变更编号功能只对位置变量P[i]有效,对位置寄存器PR[i]无效。
具体操作步骤: 将光标移至程序首行后 ①选择F5编辑命令; ②选择“变更编号”选项; ③选择F4“是” (如图4、图5所示)。
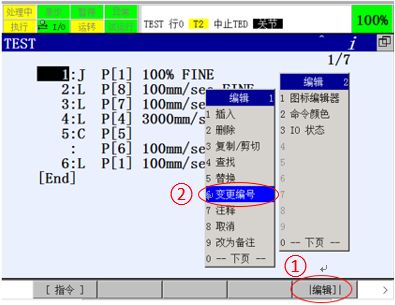
图4
备注:由于行1与行6中位置变量相同,都为P[1]。所以,变更编号后两者编号保持一致。
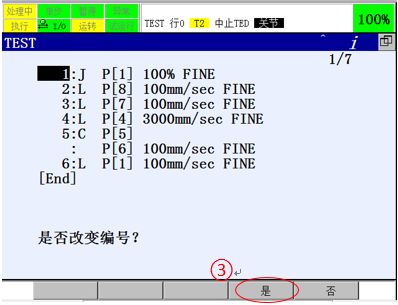
图5
2.取消(Undo)该选项的功能作用是:可以撤销指令的更改、行插入、行删除等程序编辑操作。 注意:该功能只能撤销上一步操作,不能撤销多次操作。 下文以行删除为例对该功能进行说明。 原程序如图6所示:
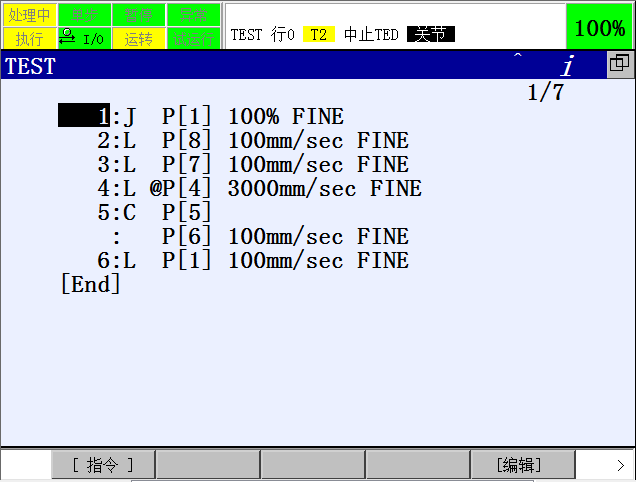
图6
在原程序中删除1-3行后,程序如图7所示:
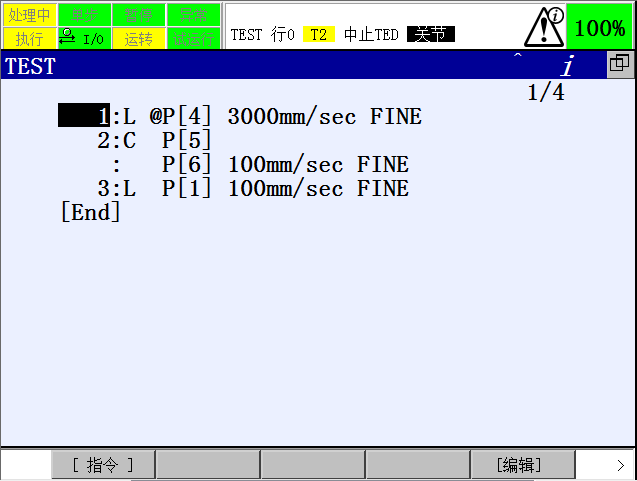
图7
通过使用取消(Undo)功能,能够撤销删除操作,恢复已删除行。 具体操作步骤: ①选择F5编辑命令; ②选择“取消”; ③选择F4“是” (如图8、图9所示)。

图8
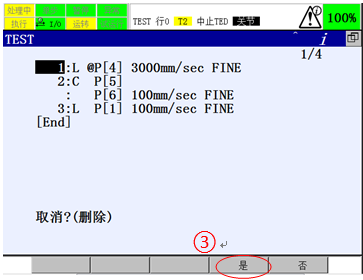
图9
取消后,程序如图10所示。

图10
3.改为备注(Remark)该选项的功能作用是:通过将程序中的单行或多行指令改为备注,可以在程序运行中不执行该指令。原程序如图11,
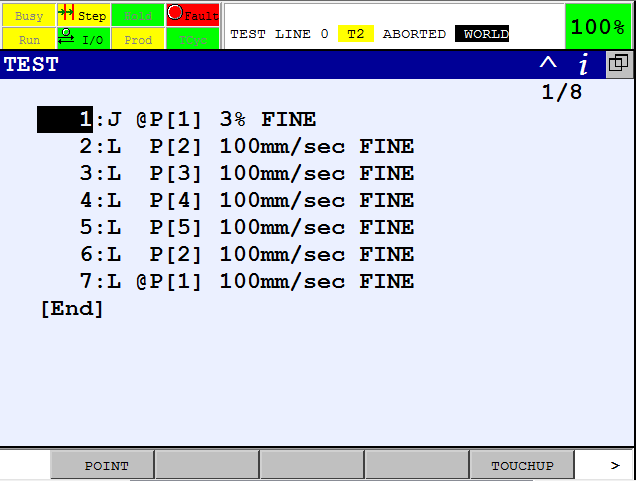
图11
该程序对应机器人轨迹如图12,
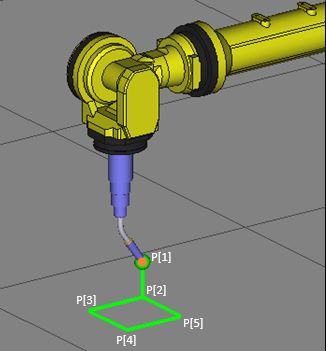
图12
将原程序2-4行改为备注后,在行的开头会显示“//”。改为备注的指令在程序运行中相当于被屏蔽,不会被执行。将2-4行改为备注后,程序如图13,
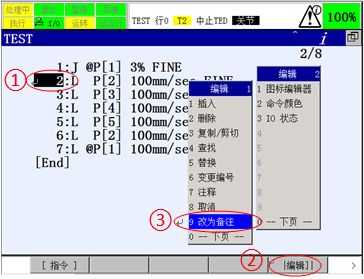
图13
改为备注后的程序执行效果如图14,行2至行4指令内容保留,但不被执行。
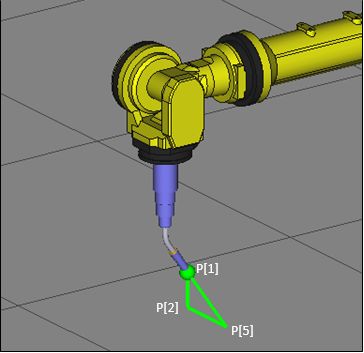
图14
具体操作步骤: ①将光标移至需要改为备注的行号位置; ②选择F5编辑命令; ③选择“改为备注”选项(如图15); ④根据提示,下移光标选中目标对象; ⑤选择F4“改为备注”(如图16)。
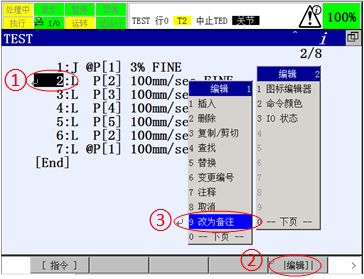
图15

图16
备注:若要取消备注,可按照相同操作步骤选择取消备注。
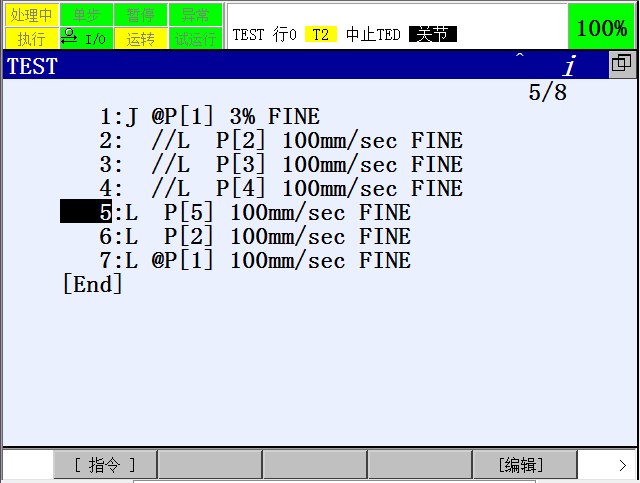
图17
审核编辑 :李倩
-
机器人
+关注
关注
211文章
28524浏览量
207553 -
程序
+关注
关注
117文章
3792浏览量
81171 -
Fanuc
+关注
关注
18文章
117浏览量
36671
原文标题:FANUC机器人指令编辑(变更编号、取消、改为备注)
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
FANUC 工业机器人编程与联网相关资料推荐
YAMAHA机器人 RCX240控制柜参数
FANUC程序计时指令的使用你知道多少?
如何使用FANUC程序计时指令详细概述


24个FANUC机器人的视觉功能详细介绍

轻松掌握FANUC机器人编程 维护与外围集成

FANUC工业机器人的运动指令
FANUC机器人与SIEMENS PLC的PROFIBUS-DP通讯技术分析






 工商网监
工商网监
评论