 介电润湿液体透镜仿生复眼的设计与仿真
介电润湿液体透镜仿生复眼的设计与仿真
自然界中昆虫复眼是天然存在的多孔径曲面光学系统,具有视场大、体积小、灵敏度高、对运动物体敏感,且能够实时对进行图像分析和处理等优点。模拟昆虫复眼设计和制作的仿生复眼系统在照明系统、工业检测、自主导航、医学、安防设备等领域都具有广阔的应用前景与良好的发展潜力。因此,有关仿生复眼系统的研究引起了国内外科研工作者的广泛关注。然而,现有的仿生复眼系统大多是采用固定焦距的子眼透镜阵列,一旦复眼系统的结构确定,系统的成像焦平面随之确定,即只能对景深范围内物体进行清晰成像,不利于对景深范围外目标物的探测和接收。
为解决这一问题,可变焦仿生复眼系统应运而生。南京邮电大学电子与光学工程学院微流控光学技术研究中心梁忠诚教授团队设计了一种基于介电润湿液体透镜曲面阵列的仿生复眼光学系统,运用介电润湿液体透镜的自适应变焦能力,解决由于物体或者系统成像接收器移动造成的系统离焦像差;分析曲面基底的曲率半径及液体透镜子单元的尺寸对系统成像质量的影响,计算系统接收器可移动范围。结果表明:系统成像的视场角随着基底曲率的增大而增大。相比于非均匀透镜阵列,均匀透镜阵列可明显降低系统的离焦像差。适当减小子透镜单元尺寸,也可以达到降低边缘透镜离焦像差的目的。当物距或者接收器位置发生改变时,通过调整子透镜单元焦距降低系统的离焦像差。系统接收器可移动范围为 1.9 mm~15 mm。相关研究将推动仿生复眼系统的应用发展,也为合理利用液体透镜提供理论依据。
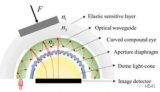
基于液体透镜的仿生复眼光学系统主要由双液体透镜、曲面基底、光阑和平面探测器组成,如图1(a)所示。透镜曲面阵列均匀排布如图1(b)所示,分为4环(位于曲面基底正中心为第一环),环与环之间以及同一环子透镜尺寸相同且紧密相切排布,则每环子眼透镜的个数依次为 1、 6、 12、 18。该仿生复眼系统的子眼透镜单元为基于介电润湿效应的双液体可变焦透镜,其结构如图1(c)所示。子透镜侧壁由外到内依次为腔体、绝缘层和疏水层。其中透镜的腔体和基底都采用导电 PET (polyethyleneterephthalate)材料,这种 PET 材料是涂覆有导电ITO(indium tin oxide)的柔性材料。绝缘层是通过在透镜腔体上蒸镀一定厚度的派瑞林(Parylene)来实现的,最后涂覆一层氟化聚合物作为疏水层。腔内为两种密度相同且折射率不同的液体组合,其中上层液体为导电液体,下层为绝缘液体。根据Young-Lippman 方程,控制工作电压可以改变双液体界面曲率,调节液体透镜子眼单元焦距,从而使得每个子眼透镜单元成像于同一接收平面上。图1(d)给出了仿生复眼系统的成像示意,物体经液体透镜曲面阵列成像在探测接收器上。当物距或像距发生移动时,光线聚焦位置将偏离探测器接收面,此时只需调整工作电压,改变子眼透镜焦距,使得光线重新聚焦于探测接收器上。由于液体透镜曲面阵列均匀排布,相邻液体透镜夹角(Δφ)相等,故可得第n环透镜主光轴与透镜阵列主光轴之间的夹角αn为αn=(n–1)Δφ,其中Δφ= 2arcsin(D/2R),整个复眼系统的视场角为2αn。
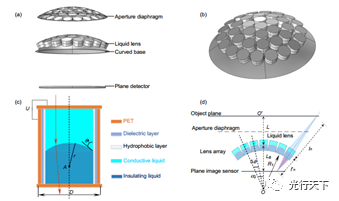
图1.基于介电润湿液体透镜的仿生复眼系统设计原理(a)侧面图;(b)透镜单元排列方式;(c)透镜结构图;(d)成像原理示意图 不同视场下目标物字母“F”经不同曲率仿复眼系统的成像情况如图2所示。从图中看出,在正入射的情况下,基底曲率半径越大,子眼透镜成像越清晰。当视场角增大,基底曲率半径越小,系统成像质量越好。这是因为在光学系统中,轴外光的成像质量比轴上光的成像质量差,且偏离主光轴越远,成像越模糊。在正入射时,基底曲率半径越大,各环子透镜的光轴与入射光的夹角越小,子透镜成像越清晰。当视场角逐渐增大,入射光线与各环子透镜光轴的夹角逐渐变大,成像质量逐渐变差。此时,若减小基底的曲率半径,可降低入射光与各环子透镜光轴的夹角,从而达到提高成像质量的目的。因此,在复眼透镜基底曲率半径的选取上,既要考虑正入射的情况,也要兼顾系统在不同视场角下的工作性能。
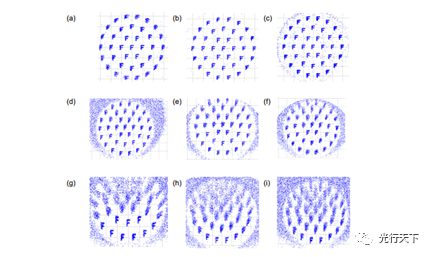
图2.不同视场情况下,不同曲率仿复眼系统的成像效果。(a) R1=10 mm,正入射;(b) R2=15 mm,正入射;(c) R3=20 mm,正入射;(d) R1=10 mm,视场角 20°;(e) R2=15 mm,视场角 20°;(f) R3=20 mm,视场角 20°;(g) R1=10 mm,视场角 35°;(h) R2=15 mm,视场角 35°;(i) R3=20 mm,视场角35° 曲面基底的曲率半径和各子透镜位置保持不变,子眼透镜直径分别取 1 mm、 2 mm 和 3 mm时,复眼系统的成像效果如图3所示。从图中可以看出:当透镜直径增大至 3 mm 时,第三环子眼透镜对应成像模糊不清。本文认为随着透镜尺寸变大,对应子眼透镜的 F 数()降低,减小了焦深,从而增加了系统对离焦的敏感性。因此,在保证系统成像分辨率的前提下,尽可能减小子眼透镜尺寸。
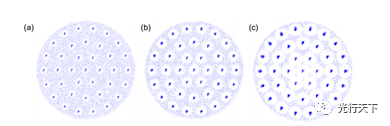
图3.不同直径透镜单元对复眼系统成像效果的影响
在分析子眼透镜单元均匀性对系统成像质量的影响时,非均匀子眼透镜组成阵列的第一环子眼透镜直径为 1 mm,从里往外每环依次增加0.2 mm,第 6 环对应子眼透镜直径为 2 mm。均匀子眼透镜单元组成的阵列,每环透镜直径均为1 mm,且每环子眼透镜中心线与非均匀透镜阵列相应的子眼单元中心线重合。调整每环液体透镜焦距,使其聚焦于成像探测器上。从系统的成像光斑可以发现:相比于非均匀微透镜阵列,均匀微透镜子眼单元组成的曲面阵列可以明显降低系统的离焦像差。
当物体固定不动时,由于子眼透镜焦距具有可调性,系统接收探测器位置也可以根据实际需要进行一定范围的调整。图4给出了仿生复眼系统的成像接收器可移动范围,其中图4(a)为平行子眼透镜光轴光线,在曲面基底球心处会聚一点,此位置为成像接收平面的最大位置,距离基底最高位置为 15 mm;调节液体透镜工作电压,改变液体透镜单元的焦距,使得光线汇聚到图 4(b)所示的接收探测器位置,此时液体透镜接触角已经达到饱和状态,对应探测器位置为最小位置,距离基底是 1.9 mm。该系统的接收探测器位置变化范围为 1.9 mm~15 mm。
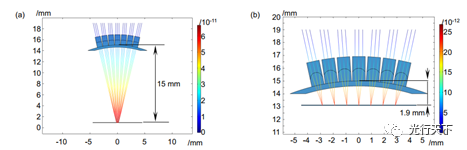
图4.仿生复眼系统的成像接收面的接收范围。(a)最远接收位置;(b)最近接收位置 该工作得到了国家自然科学基金(61775102, 61905117)和基础加强计划技术领域基金(2019-JCJQ-JJ-446)的支持。
审核编辑 :李倩
-
探测器
+关注
关注
14文章
2632浏览量
73001 -
照明系统
+关注
关注
3文章
411浏览量
32892 -
光学系统
+关注
关注
4文章
243浏览量
18298
原文标题:介电润湿液体透镜仿生复眼的设计与仿真
文章出处:【微信号:光行天下,微信公众号:光行天下】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
超透镜的设计与分析
40VRMS至60VRMS镜头的HV892K7-G电感器液体透镜驱动器
太阳能电池衍射透镜设计与仿真
太阳能电池衍射透镜设计与仿真
介电分析及其应用
一种仿生球面复眼系统的图像拼接算法研究(SIFT图像匹配)
一种基于仿生复眼的高密度阵列曲面三维触觉传感器
基于模板化去润湿诱导的液体样本离散化技术
液体镜头介绍
基于介电润湿效应的叠加式液体透镜波前校正
一文看懂石英玻璃复眼透镜在激光应用中的优势
揭秘液态透镜的类型和工作原理
基于三维超球面的声学复眼装置,可用于全向宽带信号增强






 工商网监
工商网监
评论