 BMP280气压传感器使用指南
BMP280气压传感器使用指南
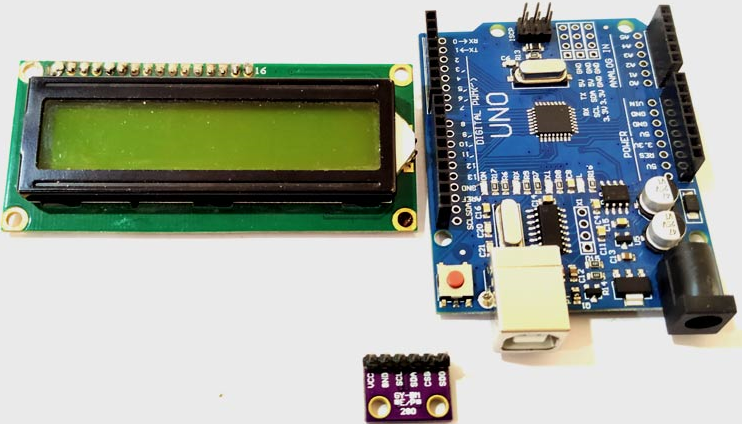
博主最近在调试 bmp280 气压传感器。
1、前言
BOSCH 出的 BMP280 气压传感器,可以用于测量气压、海拔高度等。 无人机一般都会使用气压计,给飞控定高,还可以做天气监控,因为温度和风速的变化都会影响测量结果。
目前已经出了 BMP380、BMP390 ,精度更高。
2、传感器特性
- 具有数字 I2C、SPI 串口标准输出。 (I2C up to 3.4 MHz) (SPI 3 and 4 wire, up to 10 MHz)
- 封装 8-pin LGA,2.0 × 2.5 × 0.95mm,小尺寸适用于很多设备
- 功耗 2.7μA @ 1 Hz 采样率
- 工作温度 -40 … +85 °C
- 测压范围 300 … 1100 hPa
典型应用
- 增强 GPS 导航(例如,首次修复改进时间、航位推算、坡度检测)
- 室内导航(楼层检测、电梯检测)
- 户外导航、休闲和体育应用
- 天气预报
- 医疗保健应用(如肺活量测定)
- 垂直速度指示(例如上升/下降速度)
目标设备
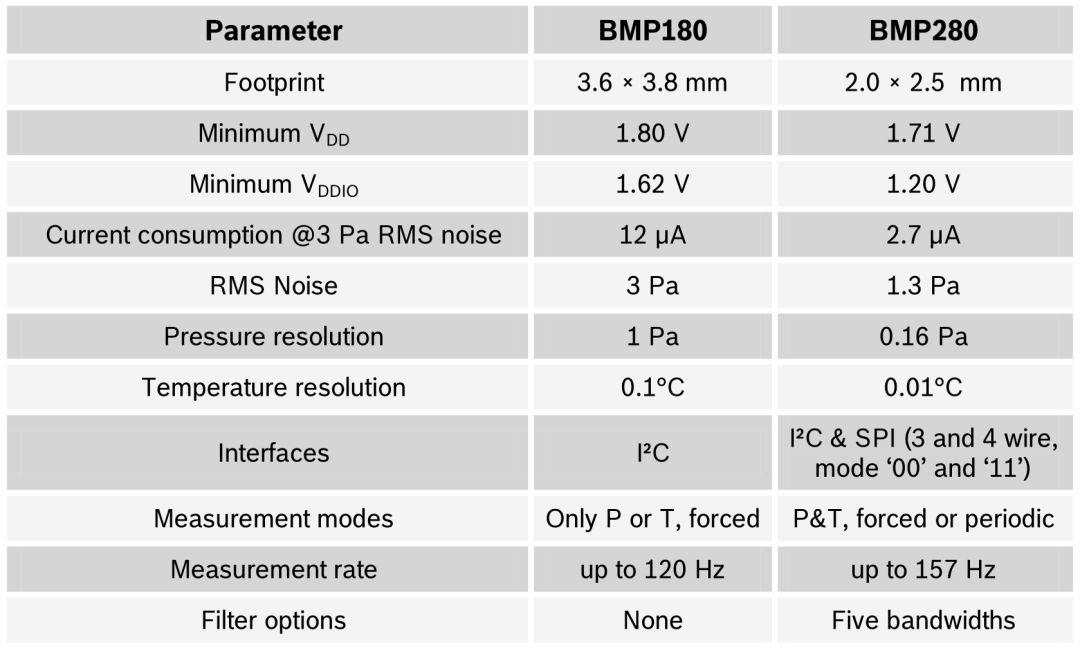
BMP180、BMP280 对比
3、参考资料
bosch 官网有数据手册
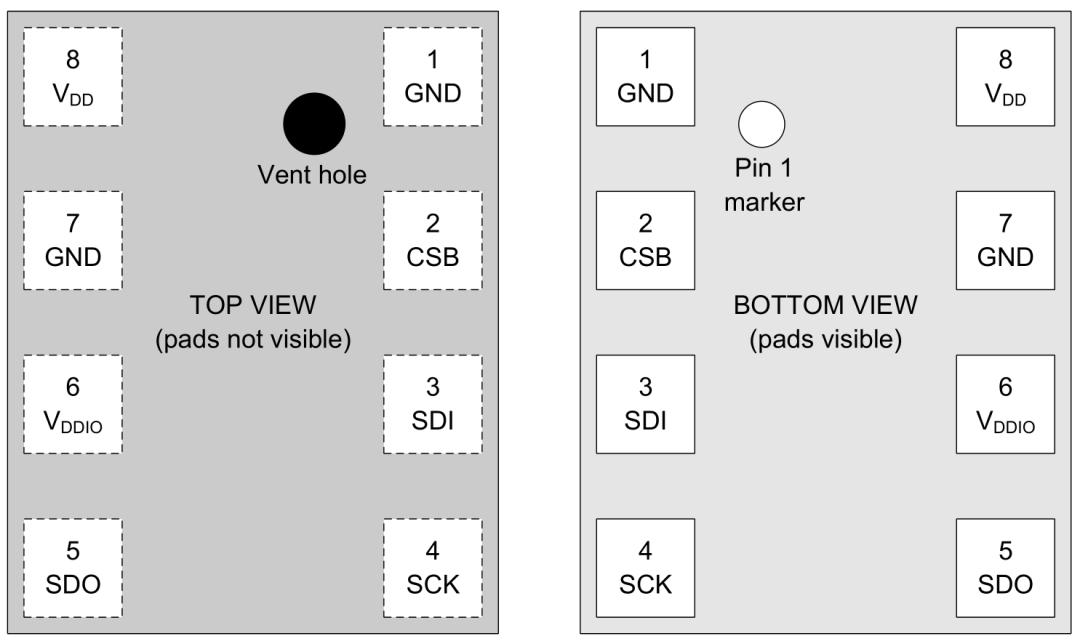
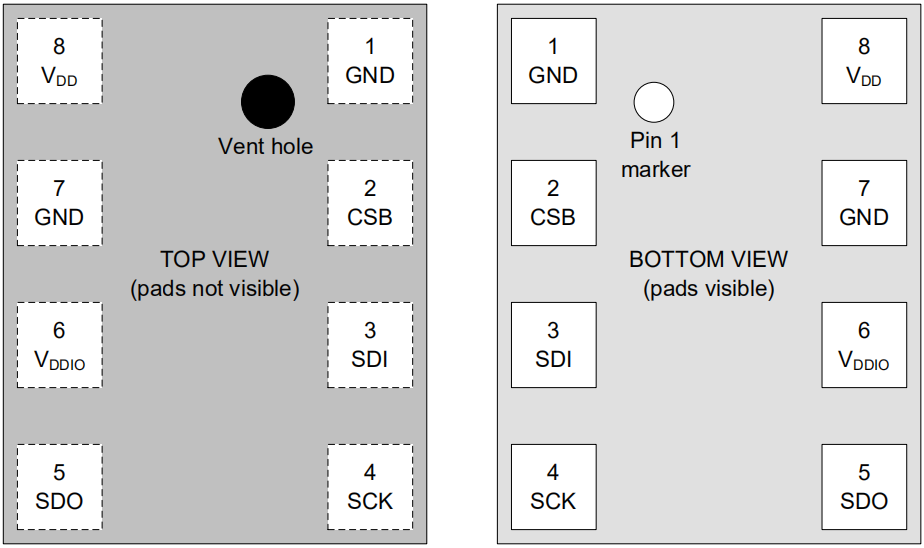
4、引脚说明
一共 8 个 PIN 脚
引脚说明
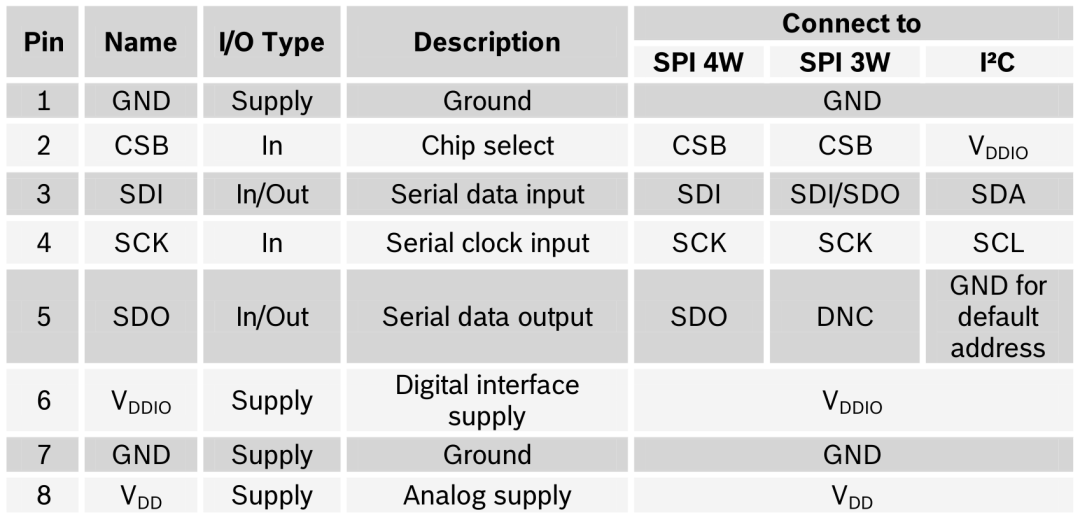
4 线 SPI
3 线 SPI
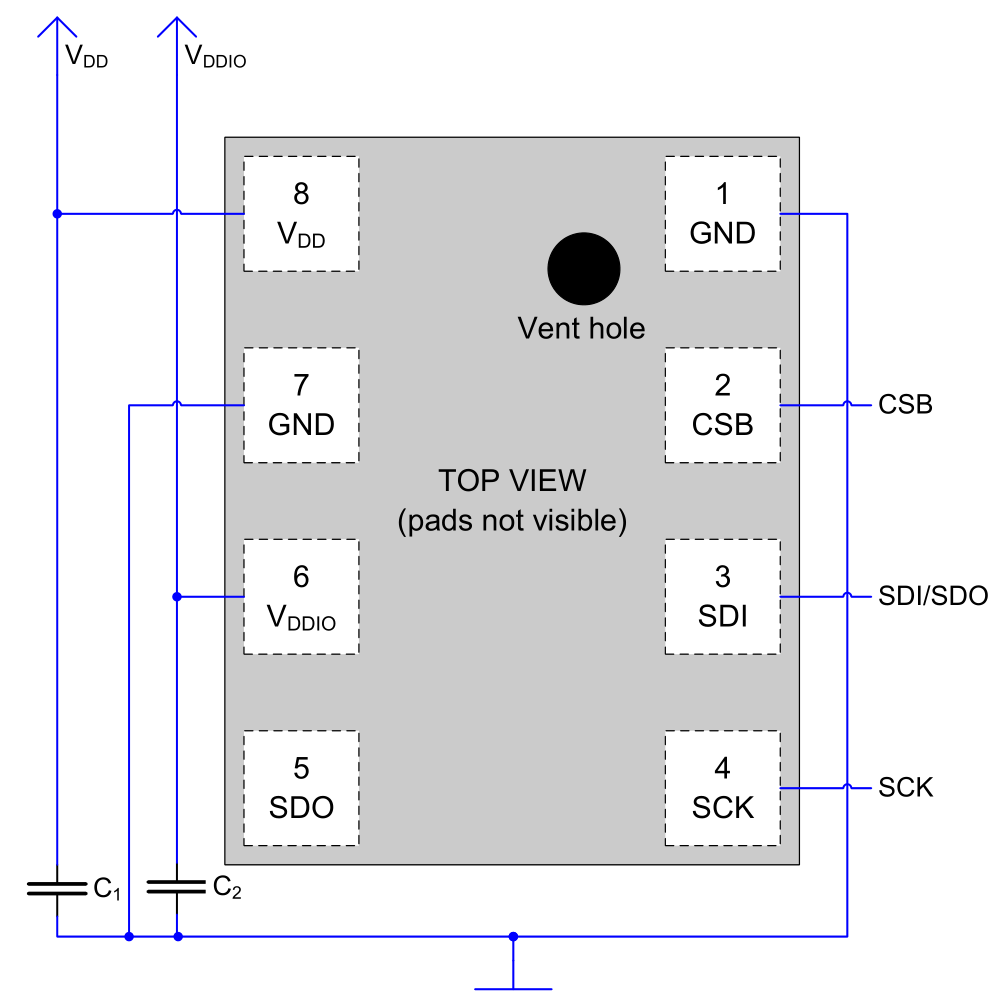
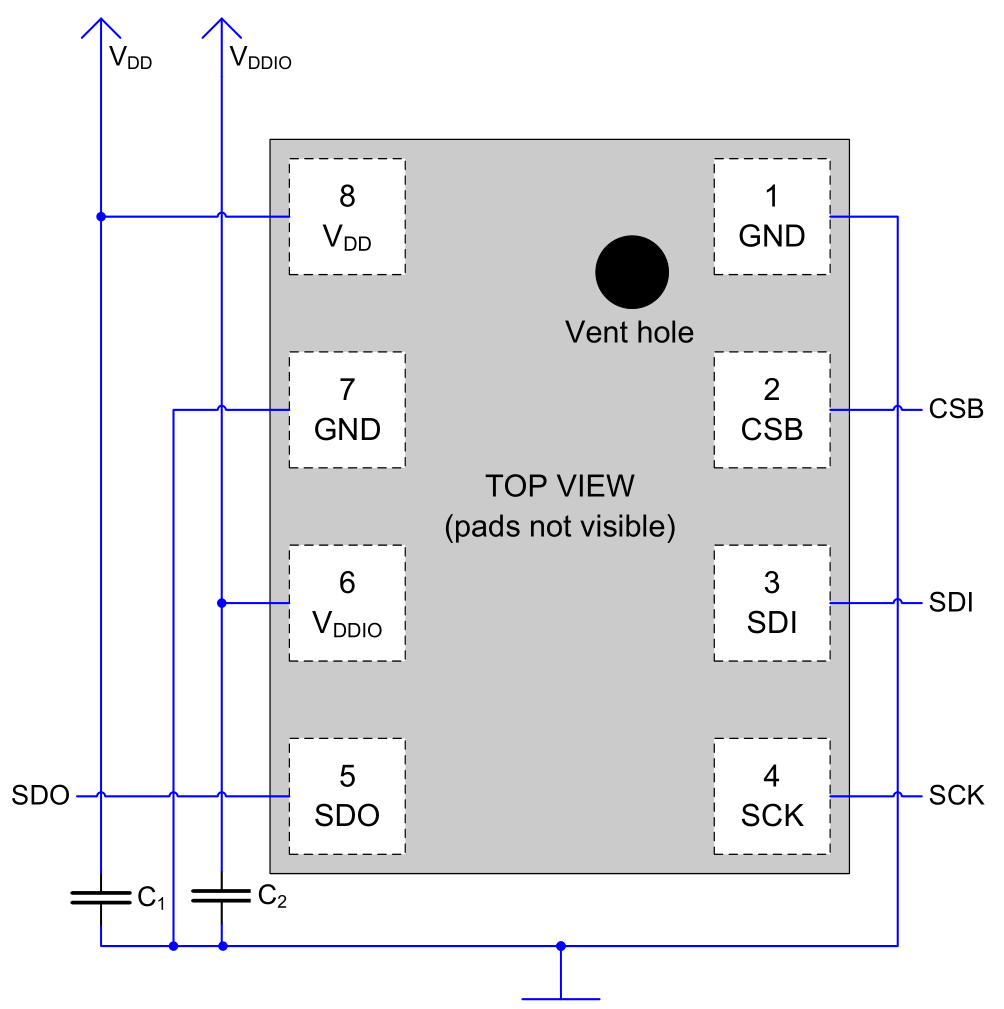
C1, C2 为 100 nF。
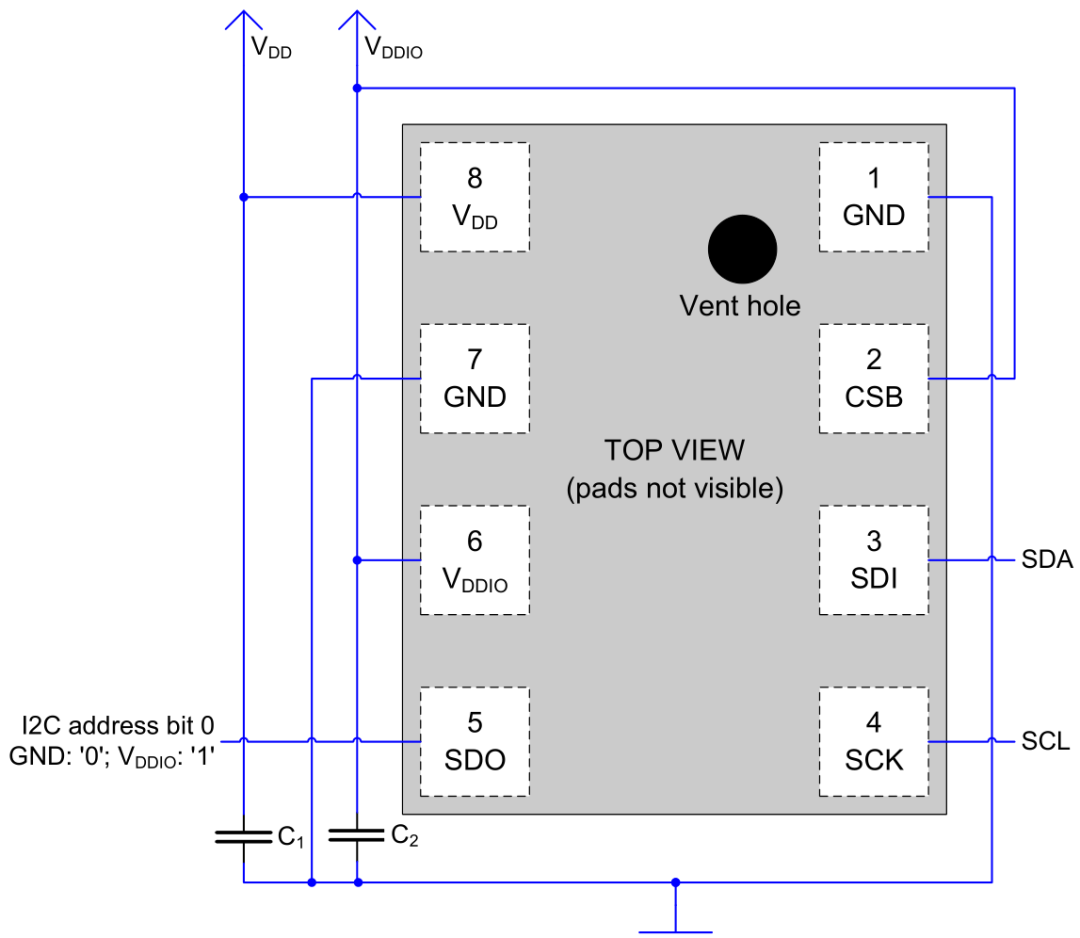
I2C 连接
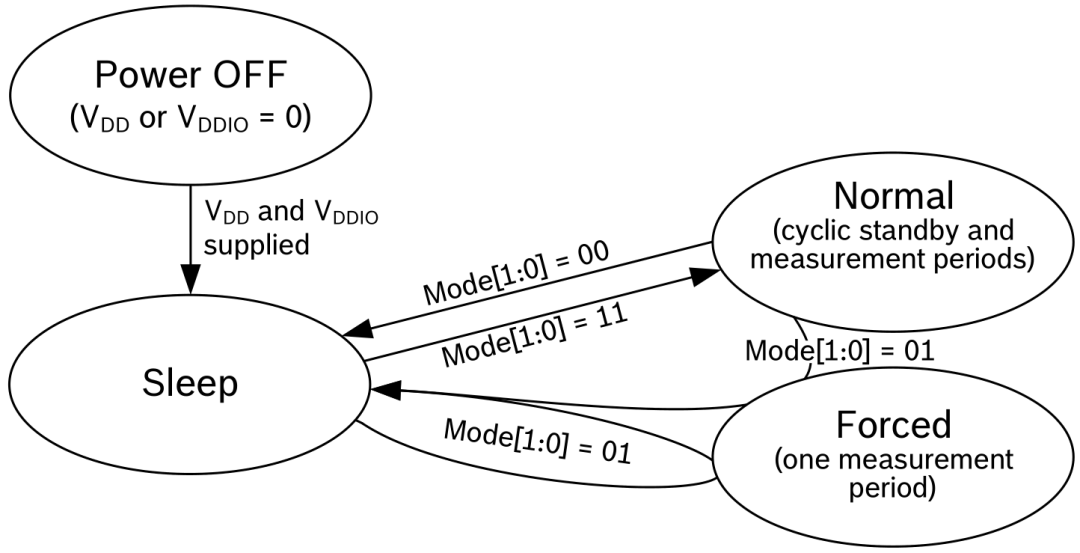
5、工作模式
- 睡眠模式
- 正常模式
- 强制模式
在睡眠模式下,不进行任何测量。 正常模式包括自动在活动测量周期和非活动待机周期之间的永久循环。 在强制模式下,执行单次测量,测量完成后传感器返回睡眠模式。
6、I2C 读写地址
BMP280 从机地址是 111011x ,高 6 bit 是固定的,最后一位 x 和一个 PIN 的状态有关系。 如果 SDO 是高,从机地址是 1110111 (0x77)。 如果 SDO 是低,从机地址是 1110110 (0x76)。
这个方案可以使得一路 I2C bus 挂两个 bmp280,同时使用。
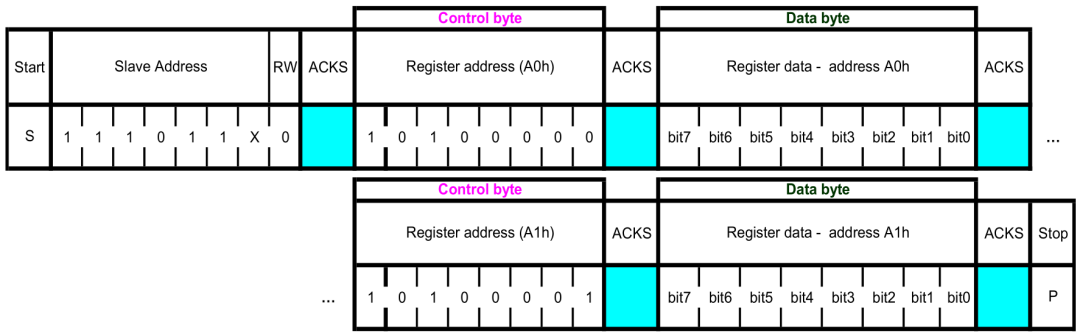
I2C 写入
I2C 读取
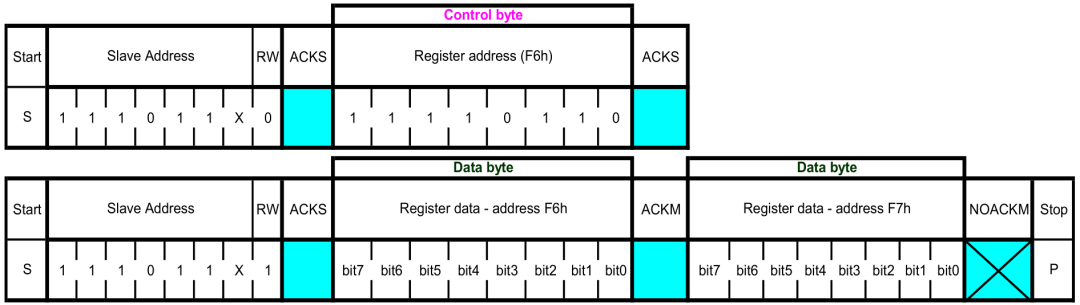
另外,该器件支持 SPI mode ‘00’ (CPOL = CPHA = ‘0’) and mode ‘11’ (CPOL= CPHA = ‘1’). SPI 支持 4-wire and 3-wire。 详情参看数据手册。
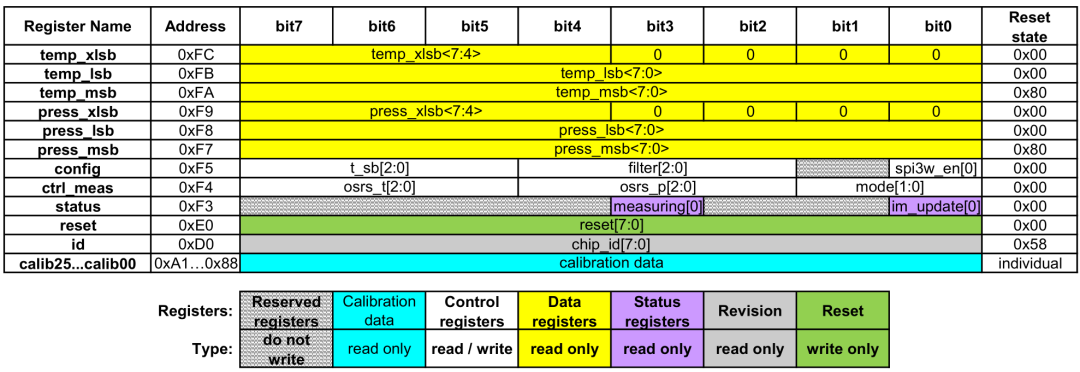
7、寄存器
#define BMP280_ADDRESS 0x76 //从设备地址
#define BMP280_RESET_VALUE 0xB6 //复位寄存器写入值
#define BMP280_CHIPID_REG 0xD0 /*Chip ID Register */
#define BMP280_RESET_REG 0xE0 /*Softreset Register */
#define BMP280_STATUS_REG 0xF3 /*Status Register */
#define BMP280_CTRLMEAS_REG 0xF4 /*Ctrl Measure Register */
#define BMP280_CONFIG_REG 0xF5 /*Configuration Register */
#define BMP280_PRESSURE_MSB_REG 0xF7 /*Pressure MSB Register */
#define BMP280_PRESSURE_LSB_REG 0xF8 /*Pressure LSB Register */
#define BMP280_PRESSURE_XLSB_REG 0xF9 /*Pressure XLSB Register */
#define BMP280_TEMPERATURE_MSB_REG 0xFA /*Temperature MSB Reg */
#define BMP280_TEMPERATURE_LSB_REG 0xFB /*Temperature LSB Reg */
#define BMP280_TEMPERATURE_XLSB_REG 0xFC /*Temperature XLSB Reg */
//状态寄存器转换标志
#define BMP280_MEASURING 0x01
#define BMP280_IM_UPDATE 0x08
- 第一个 chip_id 寄存器。
- 第二个复位寄存器,向 0xE0 写 0xB6 复位。
- 状态寄存器,两个状态:一个是 MEASURING,一个是 UPDATE。
- 4 和 5 寄存器用来设置它的模式。
- 最后 6 个是数据寄存器,XLSB 是小数位的意思,后面用来浮点转化用。
8、代码
博主用的是轮询去读数据,大家也可以配置成中断方式。
初始化部分,主要是读补偿参数、设置工作模式、设置过采样参数等:
BMP280 bmp280_inst;
BMP280* bmp280 = &bmp280_inst; //这个全局结构体变量用来保存存在芯片内ROM补偿参数
void Bmp_Init(void)
{
u8 Lsb,Msb;
/********************接下来读出矫正参数*********************/
//温度传感器的矫正值
Lsb = BMP280_Read_Byte(BMP280_DIG_T1_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_T1_MSB_REG);
bmp280->T1 = (((u16)Msb)<<8) + Lsb; //高位加低位
Lsb = BMP280_Read_Byte(BMP280_DIG_T2_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_T2_MSB_REG);
bmp280->T2 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_T3_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_T3_MSB_REG);
bmp280->T3 = (((u16)Msb)<<8) + Lsb;
//大气压传感器的矫正值
Lsb = BMP280_Read_Byte(BMP280_DIG_P1_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P1_MSB_REG);
bmp280->P1 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P2_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P2_MSB_REG);
bmp280->P2 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P3_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P3_MSB_REG);
bmp280->P3 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P4_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P4_MSB_REG);
bmp280->P4 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P5_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P5_MSB_REG);
bmp280->P5 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P6_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P6_MSB_REG);
bmp280->P6 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P7_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P7_MSB_REG);
bmp280->P7 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P8_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P8_MSB_REG);
bmp280->P8 = (((u16)Msb)<<8) + Lsb;
Lsb = BMP280_Read_Byte(BMP280_DIG_P9_LSB_REG);
Msb = BMP280_Read_Byte(BMP280_DIG_P9_MSB_REG);
bmp280->P9 = (((u16)Msb)<<8) + Lsb;
/******************************************************/
BMP280_Write_Byte(BMP280_RESET_REG,BMP280_RESET_VALUE); //往复位寄存器写入给定值
BMP_OVERSAMPLE_MODE BMP_OVERSAMPLE_MODEStructure;
BMP_OVERSAMPLE_MODEStructure.P_Osample = BMP280_P_MODE_3;
BMP_OVERSAMPLE_MODEStructure.T_Osample = BMP280_T_MODE_1;
BMP_OVERSAMPLE_MODEStructure.WORKMODE = BMP280_NORMAL_MODE;
BMP280_Set_TemOversamp(&BMP_OVERSAMPLE_MODEStructure);
BMP_CONFIG BMP_CONFIGStructure;
BMP_CONFIGStructure.T_SB = BMP280_T_SB1;
BMP_CONFIGStructure.FILTER_COEFFICIENT = BMP280_FILTER_MODE_4;
BMP_CONFIGStructure.SPI_EN = DISABLE;
BMP280_Set_Standby_FILTER(&BMP_CONFIGStructure);
}
BMP280.H
#include "myiic.h"
#include "sys.h"
//#include
#define BMP280_ADDRESS 0xEC
//#define BMP280_ADDRESS (0x76 << 1)
#define BMP280_RESET_VALUE 0xB6
#define BMP280_CHIPID_REG 0xD0 /*Chip ID Register */
#define BMP280_RESET_REG 0xE0 /*Softreset Register */
#define BMP280_STATUS_REG 0xF3 /*Status Register */
#define BMP280_CTRLMEAS_REG 0xF4 /*Ctrl Measure Register */
#define BMP280_CONFIG_REG 0xF5 /*Configuration Register */
#define BMP280_PRESSURE_MSB_REG 0xF7 /*Pressure MSB Register */
#define BMP280_PRESSURE_LSB_REG 0xF8 /*Pressure LSB Register */
#define BMP280_PRESSURE_XLSB_REG 0xF9 /*Pressure XLSB Register */
#define BMP280_TEMPERATURE_MSB_REG 0xFA /*Temperature MSB Reg */
#define BMP280_TEMPERATURE_LSB_REG 0xFB /*Temperature LSB Reg */
#define BMP280_TEMPERATURE_XLSB_REG 0xFC /*Temperature XLSB Reg */
#define BMP280_MEASURING 0x01
#define BMP280_IM_UPDATE 0x08
/*calibration parameters */
#define BMP280_DIG_T1_LSB_REG 0x88
#define BMP280_DIG_T1_MSB_REG 0x89
#define BMP280_DIG_T2_LSB_REG 0x8A
#define BMP280_DIG_T2_MSB_REG 0x8B
#define BMP280_DIG_T3_LSB_REG 0x8C
#define BMP280_DIG_T3_MSB_REG 0x8D
#define BMP280_DIG_P1_LSB_REG 0x8E
#define BMP280_DIG_P1_MSB_REG 0x8F
#define BMP280_DIG_P2_LSB_REG 0x90
#define BMP280_DIG_P2_MSB_REG 0x91
#define BMP280_DIG_P3_LSB_REG 0x92
#define BMP280_DIG_P3_MSB_REG 0x93
#define BMP280_DIG_P4_LSB_REG 0x94
#define BMP280_DIG_P4_MSB_REG 0x95
#define BMP280_DIG_P5_LSB_REG 0x96
#define BMP280_DIG_P5_MSB_REG 0x97
#define BMP280_DIG_P6_LSB_REG 0x98
#define BMP280_DIG_P6_MSB_REG 0x99
#define BMP280_DIG_P7_LSB_REG 0x9A
#define BMP280_DIG_P7_MSB_REG 0x9B
#define BMP280_DIG_P8_LSB_REG 0x9C
#define BMP280_DIG_P8_MSB_REG 0x9D
#define BMP280_DIG_P9_LSB_REG 0x9E
#define BMP280_DIG_P9_MSB_REG 0x9F
typedef enum {
BMP280_SLEEP_MODE = 0x0,
BMP280_FORCED_MODE = 0x1, //???0x2
BMP280_NORMAL_MODE = 0x3
} BMP280_WORK_MODE;
typedef enum
{
BMP280_P_MODE_SKIP = 0x0, /*skipped*/
BMP280_P_MODE_1, /*x1*/
BMP280_P_MODE_2, /*x2*/
BMP280_P_MODE_3, /*x4*/
BMP280_P_MODE_4, /*x8*/
BMP280_P_MODE_5 /*x16*/
} BMP280_P_OVERSAMPLING;
typedef enum {
BMP280_T_MODE_SKIP = 0x0, /*skipped*/
BMP280_T_MODE_1, /*x1*/
BMP280_T_MODE_2, /*x2*/
BMP280_T_MODE_3, /*x4*/
BMP280_T_MODE_4, /*x8*/
BMP280_T_MODE_5 /*x16*/
} BMP280_T_OVERSAMPLING;
//IIR
typedef enum {
BMP280_FILTER_OFF = 0x0, /*filter off*/
BMP280_FILTER_MODE_1, /*0.223*ODR*/ /*x2*/
BMP280_FILTER_MODE_2, /*0.092*ODR*/ /*x4*/
BMP280_FILTER_MODE_3, /*0.042*ODR*/ /*x8*/
BMP280_FILTER_MODE_4 /*0.021*ODR*/ /*x16*/
} BMP280_FILTER_COEFFICIENT;
typedef enum {
BMP280_T_SB1 = 0x0, /*0.5ms*/
BMP280_T_SB2, /*62.5ms*/
BMP280_T_SB3, /*125ms*/
BMP280_T_SB4, /*250ms*/
BMP280_T_SB5, /*500ms*/
BMP280_T_SB6, /*1000ms*/
BMP280_T_SB7, /*2000ms*/
BMP280_T_SB8, /*4000ms*/
} BMP280_T_SB;
typedef struct
{
/* T1~P9 */
uint16_t T1;
int16_t T2;
int16_t T3;
uint16_t P1;
int16_t P2;
int16_t P3;
int16_t P4;
int16_t P5;
int16_t P6;
int16_t P7;
int16_t P8;
int16_t P9;
} BMP280;
typedef long signed int BMP280_S32_t;
typedef long unsigned int BMP280_U32_t;
typedef long long signed int BMP280_S64_t;
#define dig_T1 bmp280->T1
#define dig_T2 bmp280->T2
#define dig_T3 bmp280->T3
#define dig_P1 bmp280->P1
#define dig_P2 bmp280->P2
#define dig_P3 bmp280->P3
#define dig_P4 bmp280->P4
#define dig_P5 bmp280->P5
#define dig_P6 bmp280->P6
#define dig_P7 bmp280->P7
#define dig_P8 bmp280->P8
#define dig_P9 bmp280->P9
/************************************************CUT****************************************/
typedef struct
{
BMP280_P_OVERSAMPLING P_Osample;
BMP280_T_OVERSAMPLING T_Osample;
BMP280_WORK_MODE WORKMODE;
} BMP_OVERSAMPLE_MODE;
typedef struct
{
BMP280_T_SB T_SB;
BMP280_FILTER_COEFFICIENT FILTER_COEFFICIENT;
FunctionalState SPI_EN;
} BMP_CONFIG;
extern BMP280* bmp280;
u8 BMP280_Check(void);
void BMP280_Set_TemOversamp(BMP_OVERSAMPLE_MODE * Oversample_Mode);
void BMP280_Set_Standby_FILTER(BMP_CONFIG * BMP_Config);
void Bmp_Init(void);
u8 BMP280_GetStatus(u8 status_flag);
//long BMP280_Get_Pressure(void);
double BMP280_Get_Pressure(void);
double bmp280_compensate_T_double(BMP280_S32_t adc_T);
double bmp280_compensate_P_double(BMP280_S32_t adc_P);
主函数
void task2_task(void *pvParameters)
{
double BMP_Pressure;
Bmp_Init();
while(1)
{
while(BMP280_GetStatus(BMP280_MEASURING) != RESET);
while(BMP280_GetStatus(BMP280_IM_UPDATE) != RESET);
BMP_Pressure = BMP280_Get_Pressure();
printf("Pressure %f Pa \\r\\n",BMP_Pressure);
}
}
double BMP280_Get_Pressure(void)
{
uint8_t XLsb,Lsb, Msb;
long signed Bit32;
double pressure;
XLsb = I2C_ReadOneByte(BMP280_ADDRESS,BMP280_PRESSURE_XLSB_REG);
Lsb = I2C_ReadOneByte(BMP280_ADDRESS,BMP280_PRESSURE_LSB_REG);
Msb = I2C_ReadOneByte(BMP280_ADDRESS,BMP280_PRESSURE_MSB_REG);
Bit32 = ((long)(Msb << 12))|((long)(Lsb << 4))|(XLsb>>4);
pressure = bmp280_compensate_P_double(Bit32);
return pressure;
}
double bmp280_compensate_P_double(BMP280_S32_t adc_P)
{
double var1, var2, p;
var1 = ((double)t_fine/2.0) - 64000.0;
var2 = var1 * var1 * ((double)dig_P6) / 32768.0;
var2 = var2 + var1 * ((double)dig_P5) * 2.0;
var2 = (var2/4.0)+(((double)dig_P4) * 65536.0);
var1 = (((double)dig_P3) * var1 * var1 / 524288.0 + ((double)dig_P2) * var1) / 524288.0;
var1 = (1.0 + var1 / 32768.0)*((double)dig_P1);
if (var1 == 0.0)
{
return 0; // avoid exception caused by division by zero
}
p = 1048576.0 - (double)adc_P;
p = (p - (var2 / 4096.0)) * 6250.0 / var1;
var1 = ((double)dig_P9) * p * p / 2147483648.0;
var2 = p * ((double)dig_P8) / 32768.0;
p = p + (var1 + var2 + ((double)dig_P7)) / 16.0;
return p;
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2551文章
51076浏览量
753359 -
串口
+关注
关注
14文章
1551浏览量
76485 -
BOSCH
+关注
关注
14文章
53浏览量
54296 -
气压传感器
+关注
关注
4文章
136浏览量
21078 -
BMP280
+关注
关注
1文章
20浏览量
5729
发布评论请先 登录
相关推荐
BMP280压力温度传感器的驱动设计与实现
压力和温度监测在嵌入式系统开发中是非常常见的需求,特别是对环境大气压力和温度的检测需求就更常见了。我们一般都会选择一些封装较小操作比较方便的压力传感器。BMP280就是满足这一要求的器件。在这一篇中我们将设计并实现
发表于 12-09 14:32
•3051次阅读
【TI SimpleLink SensorTag试用体验】8.数字气压计BMP280
本帖最后由 z***hello 于 2016-5-16 17:41 编辑
前面介绍的3个传感器均是TI出品的低功耗传感器,此次介绍一下Bosch出品的气压传感器——
发表于 05-15 17:28
【Ti SimpleLink SensorTag试用体验】+ SensorTag BMP280气压传感器服务加入
http://www.ti.com.cn/ww/wireless_connectivity/sensortag2015/index.htmlBMP280-气压传感器BMP280 是一种
发表于 05-17 12:47
通过BMP280气压/温度传感器模块测量大气压和温度
BMP280气压/温度测量一、本例程实现功能二、 传感器参数配置概述三、接线图四、完整代码五、代码运行结果一、本例程实现功能通过BMP280气压
发表于 01-07 06:40
【RVBoards-哪吒】Lab4:大气压强传感器BMP280
本帖最后由 zhangyue510 于 2022-1-15 10:01 编辑
项目名称:大气压强传感器BMP280模块代码地址:rvboards/d1_demo: The demo
发表于 01-15 09:50
气压传感器bmp280与ms5611哪个好
本文开始阐述了BMP280的定义与BMP280的应用程序,其次阐述了MS5611的定义、MS5611参数、MS5611的分类与典型应用,最后详细分析了气压传感器
发表于 03-08 09:08
•2.6w次阅读
BMP280气压传感器的特点性能及应用
Bosch 的 BMP280 是一种专为移动应用设计的绝对气压传感器。该传感器模块采用极其紧凑的封装。得益于小尺寸和低功耗特性,这种器件可用在如移动电话、GPS 模块或手表等电池供电型
单片机-bmp280大气压强与温度传感器使用详解
单片机 BMP280大气压强与温度传感器使用详解 转载:https://blog.csdn.net/sunshinebooming/article/details/79637822最近实习中一个项目要用到多种
发表于 12-22 19:30
•29次下载

博世BMP280数字气压传感器介绍
BMP280是博世最新推出的数字气压传感器,具有卓越的性能和低廉的价格,相对精度为±0.12 hPa(相当于±1米),传感器功耗仅有2.7μA,包括压力和温度测量功能。
发表于 07-20 11:12
•7663次阅读
将BMP280压力传感器模块与Arduino连接的方法
如果您想构建自己的温度监测系统或测量无人机的高度,或者只是想测量您所在地区的大气压力,那么您在项目中使用的最佳模块之一就是BMP280 压力传感器模块。BMP280是绝对压力和温度监测





 工商网监
工商网监
评论