 单镜头视觉系统检测车辆的测距方法
单镜头视觉系统检测车辆的测距方法

以前提过单目测距的问题,检测的障碍物2-D框加上摄像头的姿态和路面假设。以下根据公开发布的论文讨论具体的算法:
注:深度学习直接估计深度图不属于这个议题。
1。Vision-based ACC with a Single Camera: Bounds on Range and Range Rate Accuracy
著名的Mobileye论文,先看成像几何如图:
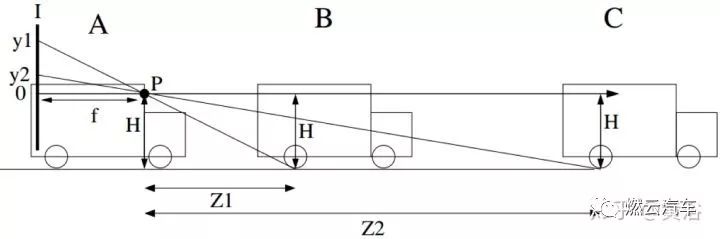
本车A,前方车B和C,摄像头P焦距f,高度H,和障碍物B/C距离Z1/Z2,B/C检测框着地点在图像的投影是y1/y2。那么y=fH/Z,所以Z=fH/y。下面是三个不同距离的估计结果:

精度测量得到:90米误差大约10%, 44米误差约为5%。
2。Integrated Vehicle and Lane Detection with Distance Estimation
算法流程如下:
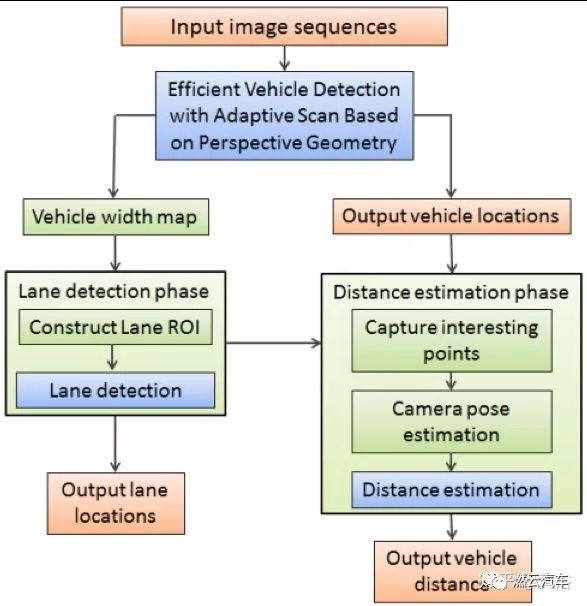
先是从3个消失点估算摄像头焦距,然后6个2D-3D对应点得到摄像头姿态:

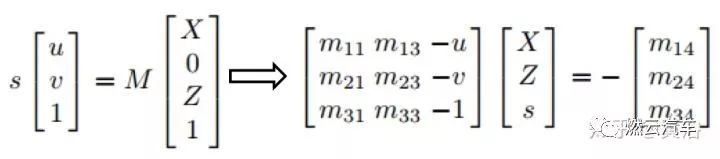
基于车道宽度的假设(3.75米),可以算出投影矩阵,随之得到距离公式:
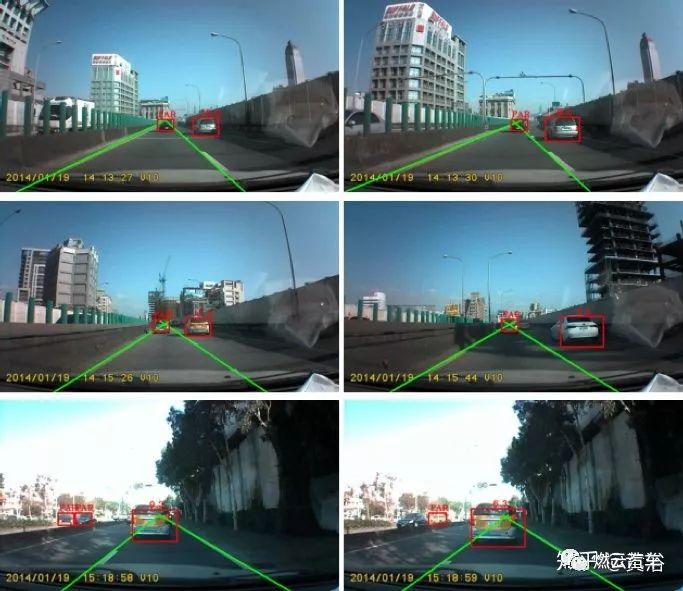
下图是一些结果:
3。Use of a Monocular Camera to Analyze a Ground Vehicle’s Lateral Movements for Reliable Autonomous City Driving
还是基于消失点原理,加上水平线,可得到道路场景几何关系。
消失点和pitch angle的关系:

从消失点得到pitch angle:

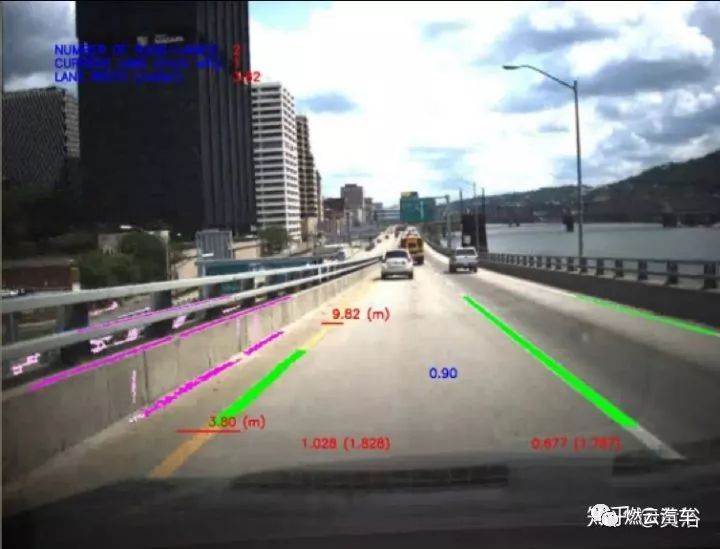
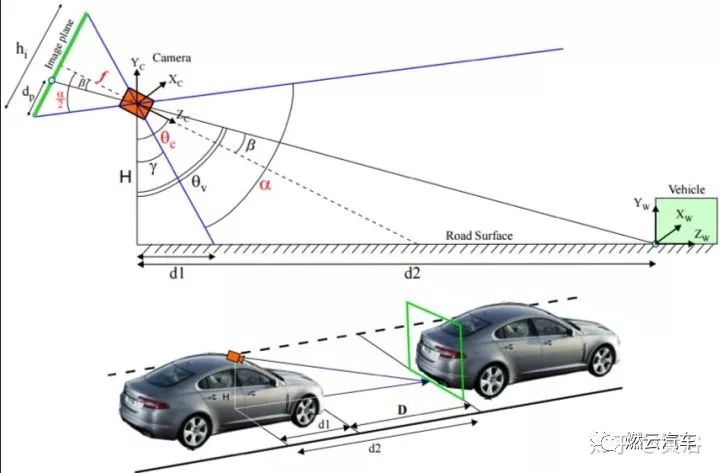
4。Range Estimation with a Monocular Camera for Vision-Based Forward Collision Warning System
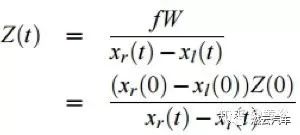
如果车辆宽度已知,那么车距为d=FW/w。
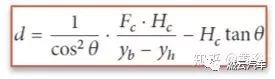
如上图,可以计算距离为:
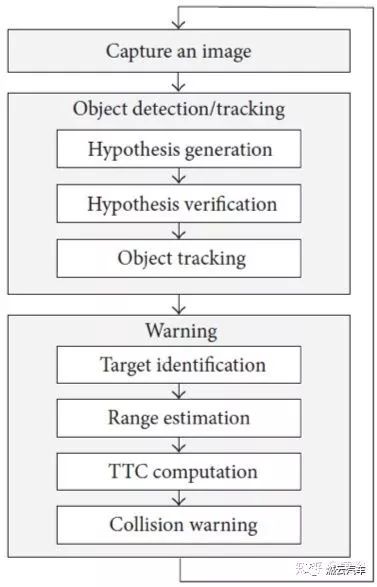
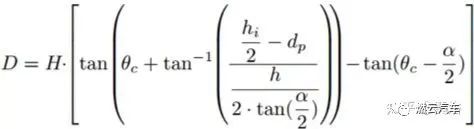
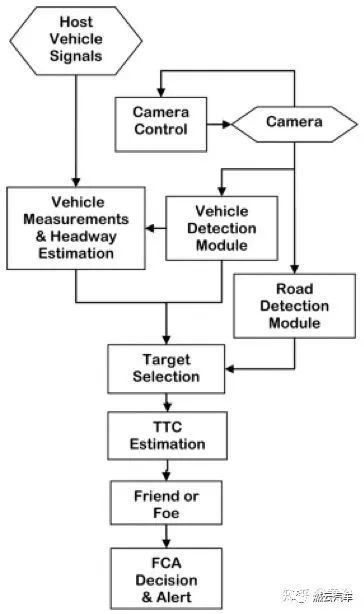
整个FCW系统流程图如下:
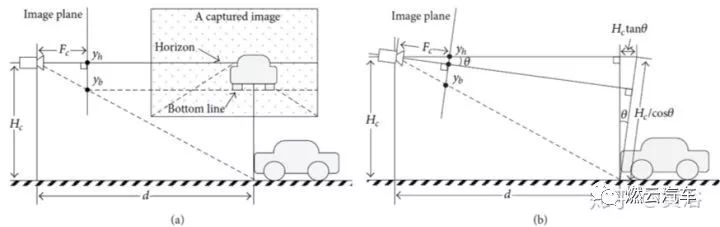
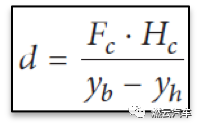
给了一个虚拟水平线的概念,估计它的位置 ,Hc为摄像头高度,Yb是车辆框底部的垂直位置。然后可以计算出车辆距离:
,Hc为摄像头高度,Yb是车辆框底部的垂直位置。然后可以计算出车辆距离:
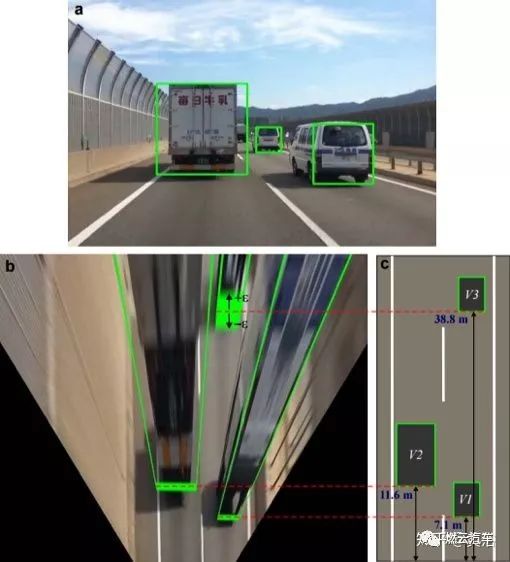
5。Robust Vehicle Detection and Distance Estimation Under Challenging Lighting Conditions
碰撞报警需要估算安全距离。下图几何关系能给出估计距离的公式:
距离公式为
下图是IPM的鸟瞰图展示距离:
6。Pitch Angle Estimation Using a Vehicle Mounted Monocular Camera for Vehicle Target Range Measurement
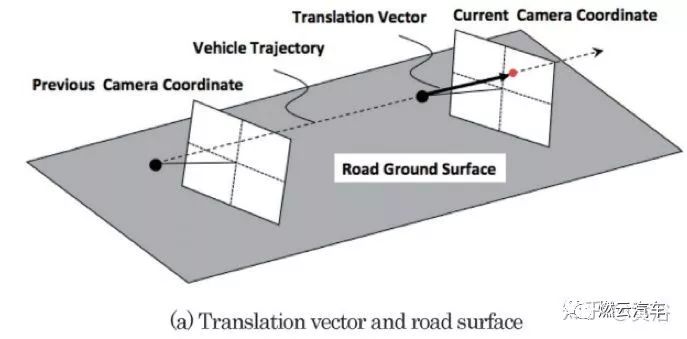
计算特征点运动,由此得到自身摄像头运动,从其平移向量推出pitch angle。
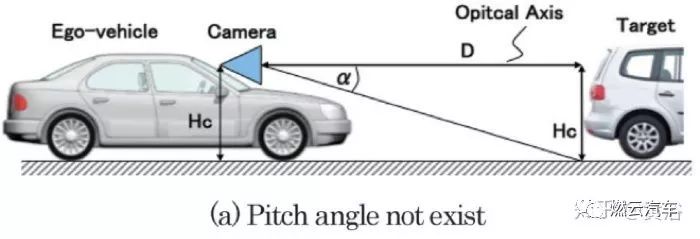
上图可以计算出前方车的距离:
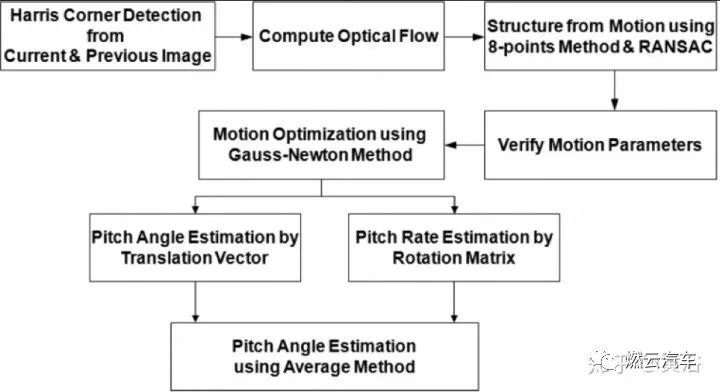
整个系统流程图如下:
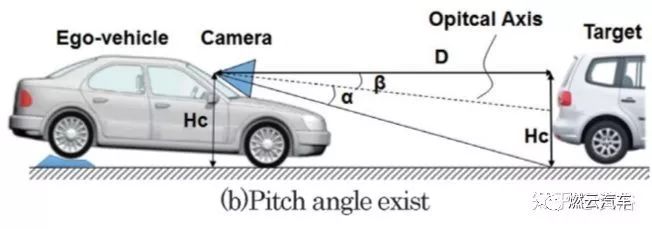
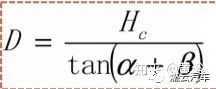
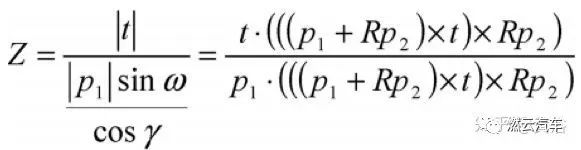
下面就是从SFM的几何关系推理距离:
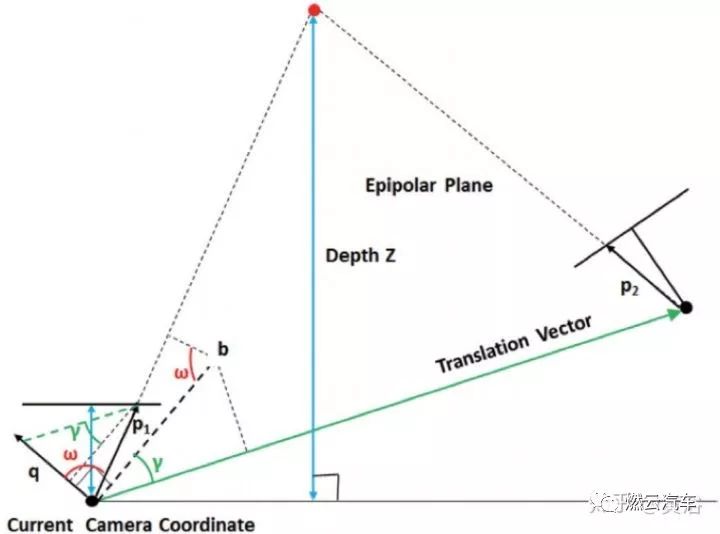
看下面的关系可以得到pitch angle:
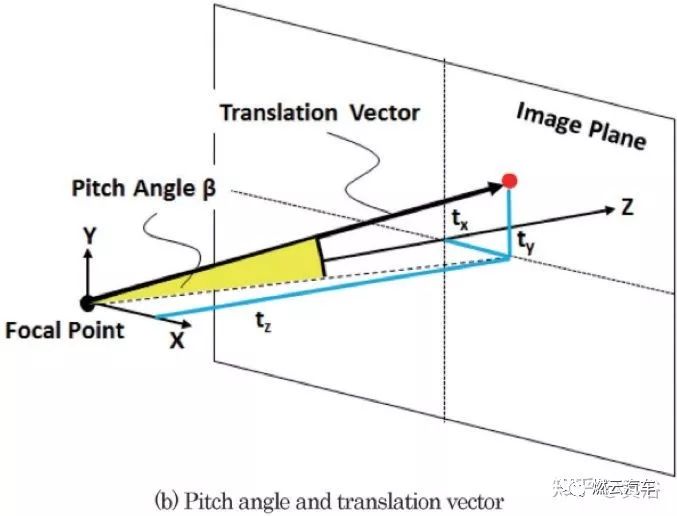
角度计算公式为
7。Forward Collision Warning with a Single Camera
time to contact (TTC) 直接从车辆的大小和位置得到,下面是流程图:
计算公式:
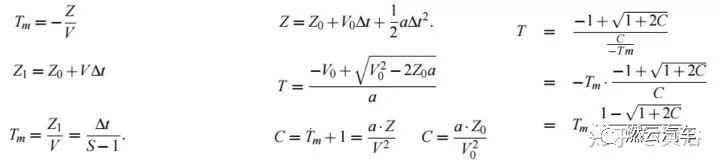
车边框的位置以及光流大小可以确定碰撞的可能性:
这里主要是通过简单的几何关系,直接估算检测的路上车辆距离并给出可能的撞击时间。现在深度学习越来越强大,理论上得到车检测边框的同时,也可以回归车的距离。
审核编辑 :李倩
-
摄像头
+关注
关注
60文章
4840浏览量
95670 -
视觉系统
+关注
关注
3文章
335浏览量
30705 -
深度学习
+关注
关注
73文章
5503浏览量
121152
原文标题:单镜头视觉系统检测车辆的测距方法
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
机器视觉系统在注塑行业的应用
机器视觉系统应用成为检测行业主导潮流
这些机器人视觉系统些关键技术,你必须要知道
湖南机器视觉系统中的镜头参数如何设置?
上海回收康耐视工业视觉系统,工业相机,工业镜头
长沙回收基恩士视觉系统,激光传感器,镜头,工业相机
苏州回收基恩士视觉系统,激光传感器,镜头,工业相机
深圳机器视觉检测有什么情况要用远心镜头?
机器视觉系统设计方法

基于单目视觉的智能车辆视觉导航系统设计

基于仿生视觉系统的运动目标快速检测方法


视觉系统镜头介绍及选型方法






 工商网监
工商网监
评论