 剖析STM32-定时器3
剖析STM32-定时器3
三、定时器PWM输出实验
1. 通用定时器PWM概述
PWM,英文名Pulse Width Modulation,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通过调节占空比的变化来调节信号、能量等的变化,占空比就是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比,例如方波的占空比就是50%。PWM的功能有很多种,比如控制呼吸灯、控制直流电机或者舵机等驱动原件等等,是单片机的一个十分重要的功能。
在STM32单片机中,可以使用定时器的输出比较功能来产生PWM波:
即PWM模式可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。其框图如下图所示:
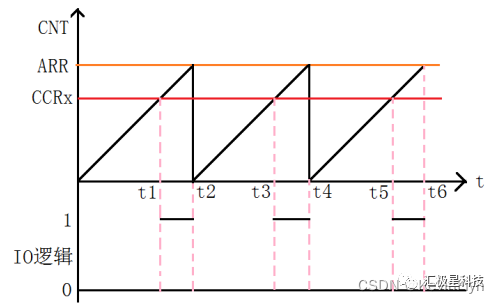
可见,横坐标是时间变量,纵坐标是CNT计数值,CNT计数值随着时间的推进会不断经历从0到ARR,清零复位再到ARR的这一过程。这之中还有一个数值是CCRx即比较值,通过比较值和输出配置可以使之输出高低电平逻辑,这样就产生了PWM波形。通过调节ARR的值可以调节PWM的周期,调节CCRx的值大小可以调节PWM占空比。
我们以通道1为例,详细讲解PWM的工作过程,如下图所示:

从最左边进入的是时钟源,由内部时钟(CNT)或者外部触发时钟(ETRF)输入,进入输入模式控制器,通过OCMR1寄存器的OC1M[2:0]位来配置PWM模式,之后进入一个选择器,由CCER寄存器的CC1P位来设置输出极性,最后由CCER寄存器的CC1E位来使能输出,然后通过OC1来输出PWM波。
CCR1:捕获比较(值)寄存器(x=1,2,3,4):设置比较值。
CCMR1: OC1M[2:0]位:对于PWM方式下,用于设置PWM模式1【110】或者PWM模式2【111】
CCER:CC1P位:输入/捕获1输出极性。0:高电平有效,1:低电平有效。
CCER:CC1E位:输入/捕获1输出使能。0:关闭,1:打开。
- PWM模式
PWM有PWM模式1和模式2两种模式,它们之间的区别用寄存器TIMx_CCMR1的OC1M[2:0]位来分析:

表中红色框标识的地方就是PWM模式1和模式2的定义和区别,可以简单理解为:PWM模式1的情况下,当前值小于比较值为有效电平;PWM模式2的情况下,当前值大于比较值为有效电平。
理解这一点对之后的PWM配置十分重要。
下面是对PWM模式1以及向上计数配置情况的说明:

** 3.相关寄存器介绍**
- 捕获/比较寄存器1(TIMx_CCR1)

这里以寄存器1举例,其它的三个寄存器(CCR2、CCR3、CCR4)都是一样的
- 捕获比较模式寄存器1(TIMx_CCMR1)


可以看到,每个捕获/比较模式寄存器可以控制两个通道,这样的话每个定时器就对应两个捕获/比较模式寄存器。其最常用的位就是0C1M(OC2M)位了,这两个位是用来设置PWM模式的,有模式1和模式2两种,这就和前面所讲的对应上了。
- 捕获/比较使能寄存器(TIMx_CCER)

可以看到,位0(CC1E)和位1(CC1P)是捕获比较使能寄存器最常用的两个位,分别控制输出使能和输出极性,这就也和刚刚讲的对应上了。
- 自动重装载寄存器(TIMx_ARR)

这个寄存器不太常用,下面的库函数配置会讲解其库函数用法。
4. 定时器输出通道引脚
定时器输出PWM和定时器中断不同,定时器中断只需要开启这一外设即可工作,定时器输出PWM需要在单片机的引脚上输出实实在在的脉冲信号。
下面是定时器3的通道引脚,可以使用部分映射或者完全映射。其它定时器的引脚可以查看芯片手册。

5.定时器PWM库函数配置
- 输出库函数配置
和定时器中断实验不同,在初始化时基单元之后,还需要对输出通道进行初始化:
void TIM_OCxInit(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
其结构体成员如下:
typedef struct
{
uint16_t TIM_OCMode; //PWM模式1或者模式2
uint16_t TIM_OutputState; //输出使能 OR失能
uint16_t TIM_OutputNState;
uint16_t TIM_Pulse; //比较值,写CCRx
uint16_t TIM_OCPolarity; //比较输出极性
uint16_t TIM_OCNPolarity;
uint16_t TIM_OCIdleState;
uint16_t TIM_OCNIdleState;
} TIM_OCInitTypeDef;
初始化实例:
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure. TIM_Pulse=100;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
设置比较值函数
void TIM_SetCompareX(TIM_TypeDef* TIMx, uint16_t Compare2);
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
输出配置步骤
① 使能定时器3和相关IO口时钟。
使能定时器3时钟:RCC_APB1PeriphClockCmd();
使能GPIOB时钟:RCC_APB2PeriphClockCmd();
② 初始化IO口为复用功能输出。函数:GPIO_Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
③ 这里我们是要把PB5用作定时器的PWM输出引脚,所以要重映射配置,
所以需要开启AFIO时钟。同时设置重映射。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
④ 初始化定时器:ARR,PSC等:TIM_TimeBaseInit();
⑤ 初始化输出比较参数:TIM_OC2Init();
⑥ 使能预装载寄存器:TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
⑦ 使能定时器。TIM_Cmd();
⑧ 不断改变比较值CCRx,达到不同的占空比效果:TIM_SetCompare2();
6.实例
我们使用STM32单片机的定时器TIM3的PWM功能,输出占空比可变的PWM波,用来驱动LED灯,从而达到LED亮度由暗变亮,又从亮变暗,如此循环。代码如下:
//timer.c源文件
#include "timer.h"
#include "led.h"
#include "usart.h"
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
//timer.h头文件
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
void TIM3_PWM_Init(u16 arr,u16 psc);
#endif
//main.c源文件
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "timer.h"
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
TIM3_PWM_Init(899,0); //不分频。PWM频率=72000000/900=80Khz
while(1)
{
delay_ms(10);
if(dir)led0pwmval++;
else led0pwmval--;
if(led0pwmval>300)dir=0;
if(led0pwmval==0)dir=1;
TIM_SetCompare2(TIM3,led0pwmval);
}
}
总结
本章从STM32定时器的原理、寄存器介绍、定时器配置以及定时器的几个常用的功能(如定时器中断、定时器输出比较PWM波形)的使用方法来教大家掌握定时器这一外设。希望读者能够仔细学习,掌握这一重要的外设。
-
微控制器
+关注
关注
48文章
7668浏览量
152254 -
定时器
+关注
关注
23文章
3256浏览量
115517 -
GPIO
+关注
关注
16文章
1217浏览量
52485
发布评论请先 登录
相关推荐
stm32定时器中断程序
STM32-基本定时器TIM6-TIM7基本定时功能

STM32-通用定时器基本定时功能资料下载

STM32 CubeMX学习:3. 定时器闪烁LED
STM32---定时器知多少
STM32定时器学习---基本定时器
STM32定时器的分类及中断原理
剖析STM32-定时器1





 工商网监
工商网监
评论